2023年12月13日 11:15
安藤ハザマ(本社:東京都港区、代表取締役社長:国谷 一彦)と、コベルコ建機株式会社(本社:東京都品川区、代表取締役社長:山本 明、以下 コベルコ建機)は、重機の遠隔操作システムと稼働データを用いた現場改善ソリューション「K-DIVE(R)」(注1)のコックピットから現場の重機2台に対して遠隔操作と自動運転を切り替えながら稼働させる検証を行い、走行移動や土砂積み込み作業を安全に完了しました。
今回の検証では、「K-DIVE(R)」に開発中の自動運転機能を搭載しました。作業によって自動運転と遠隔操作を切り替え、また1台の重機(油圧ショベル)を自動運転させている間、コックピットからもう1台の重機に対し、自動運転で行う作業を遠隔操作で設定するなど、今後、「K-DIVE(R)」がより多様な現場で活用でき、現場の生産性向上に貢献できることを示す結果となりました。
現在、建設業界の生産性向上と働き方改革を実現するための技術として、建設機械の自動化や遠隔化技術が期待されています。一方で、これらの技術は現場における省人化・無人化を可能にするため、安全や品質、施工管理、技術開発などの面において新たなルールが必要となります。安全ルールの策定や現場適用に向けた効果と課題を検証するため、2023年7月、国土交通省が募集した「建設機械施工の自動化・遠隔化技術に係る現場検証」に安藤ハザマとコベルコ建機は共同で参画し、下記ルールの下、安全に作業を完了できるか検証を行いました。
1. ルール策定
現場での遠隔・自動運転による安全な施工を実現するため、重機が稼働するエリアを無人エリア、重機と人が混在するエリアを混在エリア、人が存在するエリアを有人エリアと定義しました。重機と人が接触する可能性がある混在エリアで重機に接近する場合は「K-DIVE(R)」の非常停止機能を使うルールを安藤ハザマとコベルコ建機にて策定しました。
2. 検証内容・手順
現場から離れた1台のコックピットから、自動化技術と遠隔化技術の両方を搭載した重機2台を同時稼働させ、ダンプトラックへの土砂積み込み作業を行いました。駐機場所からの移動や土砂積み込みの準備作業等は遠隔操作で、ダンプトラックへの単純な繰り返しによる土砂積み込み作業は自動運転で行いました。
3. 検証結果
あらかじめ定めたルールに基づき、安全に作業を完了させることができました。1台のコックピットから遠隔操作と自動運転を切り替えて複数台の重機を同時に稼働できたことは、今後、「K-DIVE(R)」が多様な現場での活用に有効であることを示す結果となりました(注2)。
今回の検証を生かし、かねてより進めてきた「K-DIVE(R)」への自動運転技術の実装に向け、作業現場への適応性のさらなる向上に努めていきます。今後も安全と効率の両面を備えた省人化、無人化施工を実現し、建設業界における働き方改革に貢献していきます。
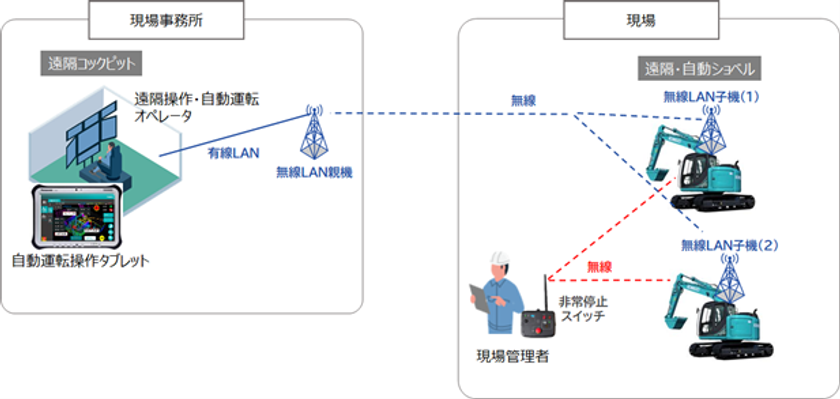
遠隔操作システムと自動運転技術の複合検証イメージ
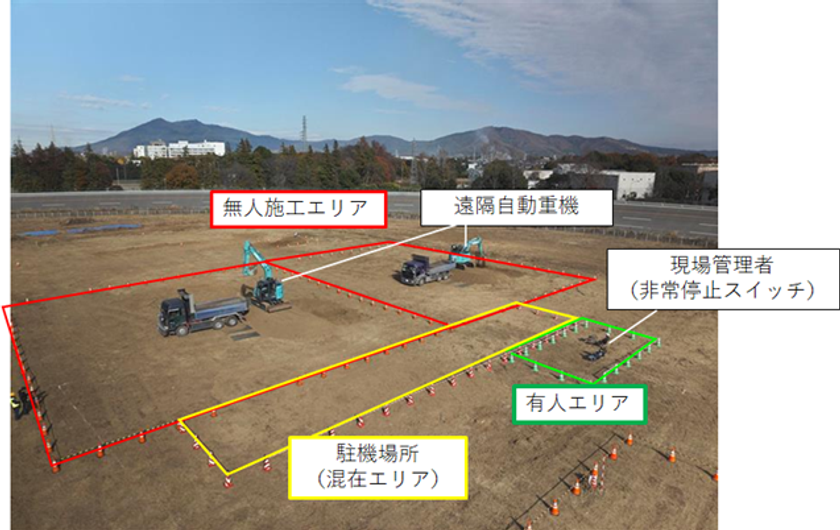
リスクアセスメントに基づいたエリア区分

コックピットでの遠隔操作状況

遠隔操作によるショベルの移動状況
画像5: https://www.atpress.ne.jp/releases/378944/LL_img_378944_5.png
ショベルの自動運転(土砂積み込み作業)公開状況
画像6: https://www.atpress.ne.jp/releases/378944/LL_img_378944_6.jpg
国土交通省担当者を交えた意見交換の状況
(注1) K-DIVE(R)
コベルコ建機が開発、提供している重機の遠隔操作システムと稼働データを用いた現場改善ソリューションです。建設業界では、危険を伴う労働環境や深刻な人手不足の改善が急務と言われています。「K-DIVE(R)」は、特定の人・場所・時間などの制約を受けずに建設現場での施工を可能とすることで、多様な人材活用、現場生産性の向上、現場無人化を実現し、本質的な安全確保が行えるようになるのが特長です。
(注2) 重機の遠隔操作と自動運転の切替機能、自動運転の内容設定を遠隔操作で行える機能は、現在サービス提供中の「K-DIVE(R)」では提供していません。
![]()