2023年5月11日 13:00
安藤ハザマ(本社:東京都港区、代表取締役社長:国谷 一彦)と、コベルコ建機株式会社(本社:東京都品川区、代表取締役社長:山本 明、以下 コベルコ建機)は、このたび、複数の自動運転油圧ショベルを同時稼働・管理するための実証実験を実施しました。
安藤ハザマは、建設現場の生産性の向上を目的に、ICTを活用した建設機械の自動運転システムの開発に取り組んでいます。建設現場での施工は、複数種の建設機械を使用する必要があり、これまで振動ローラとブルドーザの自動運転システムを開発してきました。現場で多く使われている油圧ショベルの自動運転システムについても技術開発する必要がありましたが、開発には高度な技術が必要なことから建設機械メーカーとの共同研究を検討してきました。
コベルコ建機は、「誰でも働ける現場へ KOBELCO DXソリューション」をテーマにICTロードマップを策定し、その実現に向けて中長期的に研究・開発を進めており、その柱のひとつとなる建設機械の自動運転技術を確立することで、建設現場の生産性の向上、現場無人化による本質的な安全の確保に取り組んでいます。
両社は油圧ショベルの自動運転推進に向けた研究開発を促進するために、お互いの強みを活かして共同研究を行うこととし、2019年4月に共同研究に関する協定を締結しました。共同研究において、コベルコ建機は主に油圧ショベルの自動運転システム開発を、安藤ハザマは現場へ適用するための施工と安全に対する管理システム開発や現場運用ルール化を担っています。
2022年冬、これまでの共同研究や現場実験を踏まえ、1人の作業管理者が2台の自動運転ショベルの運転管理を同時に行う実証実験を行いました。ティーチング(注1)作業や油圧ショベルの非常停止を含めた自動運転のすべての操作をタブレットから複数台同時に指示・管理することが可能なシステムとなっています。また、LiDAR(注2)で取得した掘削箇所の形状やアタッチメント角度検出のセンサによるバケット爪先の移動軌跡をタブレット画面に表示することができ、作業管理者がショベルの状態をリアルタイムに確認することができます。
今回の実験では、ダンプトラックへの土砂積込みの作業時間について、有人運転(1人で1台)と自動運転で比較を行い、1人で2台の自動運転ショベルを管理することにより、1人あたりの土砂積込み量が有人運転時より約3割増加することを確認しました。このことで、建設現場での省人化と生産性の向上に寄与すると考えています。本件は、初期段階での結果であり、今後、現場ごとに動作を最適化することで生産性をさらに向上できると考えています。
安藤ハザマとコベルコ建機は、これらの共同研究の成果をもとに、自動運転の高度化と実用化に向けこれからも協力していきます。

実証実験における自動運転の様子(右:無人の運転席を拡大)
実証実験における自動運転の様子(右:無人の運転席を拡大)

実証実験の様子(タブレットによる指示・管理)
実証実験の様子(タブレットによる指示・管理)
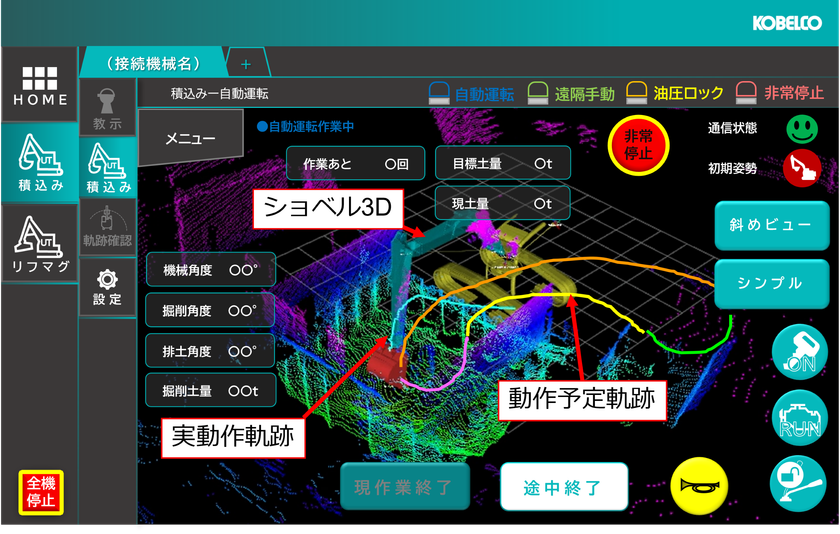
実証実験の様子(管理画面)
実証実験の様子(管理画面)
(注1)自動運転ショベルにおけるティーチングとは、プログラム作成より、現場環境に応じて、重機の動作を記録する作業です。
(注2)光を使ったリモートセンシング技術を用いて物体検知や対象物までの距離を計測するものです。
![]()