2021年12月21日 09:30
東工大発AIベンチャーであるSOINN株式会社(本社:東京都町田市、代表取締役CEO:長谷川 修、以下 当社)は、独自の「転移学習」技術をSOINN(R) 2.0 アルゴリズムと融合させ、「ロボットによるマルチモーダル転移学習」の実用化にメドをつけました。2022年中のビジネス化と販売開始を目指しています。
Deep Learningの大家であるAndrew Ng氏は、2016年に「今後、転移学習(Transfer Learning)が機械学習の商業的成功の主要な推進力の1つになる」という主旨の発言をしており、現在も世界各所で盛んに研究開発が進んでいます。
そうした中、当社はすでに「転移学習」関連の特許を日米で保有しており(※1)、この度この転移学習技術とSOINN(R) 2.0 アルゴリズム(※2)を融合させることに成功し、「ロボットによるマルチモーダル転移学習」の実用化にメドをつけました。
(※1)SOINN社保有の特許一覧(成立済みのみ)。
https://soinn.com/wp-content/uploads/2021/09/6222900d5f157d599e227c8db481c831.pdf
(※2)SOINN(R) 2.0は下記NEDOプロジェクトの成果の一部です。
NEDO:高効率・高速処理を可能とするAIチップ・次世代コンピューティングの技術開発
【研究開発項目(1)】革新的AIエッジコンピューティング技術の開発
SOINN(R) 2.0は超軽量で、例えば時系列マルチモーダルデータの場合、CPUのみを用いて(GPU不使用で)、学習と推論をそれぞれ数秒、数ミリ秒のオーダーで実行可能です。
これまでに当社は、SOINN(R) 2.0をロボットの力触覚マルチモーダル制御に適用し、双腕スカラーロボットによる「嵌め合いのきつい飲料缶の箱詰め作業」などを実現してきました。
今回このロボットシステムを活用し、マルチモーダル学習させたSOINN(R) 2.0モデルを転移学習させる検証を行い、有効性を確認しました。
検証では、まずロボットがブロックの周囲をなぞる挙動をSOINN(R) 2.0に力触覚マルチモーダル学習させました(図1)。この挙動は、バリ取りや塗布といった作業を想定しています。
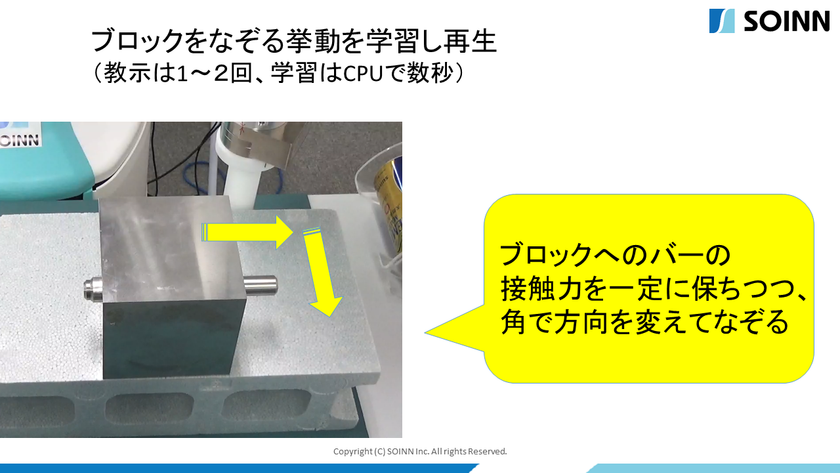
図1:SOINN(R) 2.0によるロボットの力触覚マルチモーダル学習
図1:SOINN(R) 2.0によるロボットの力触覚マルチモーダル学習
次にこのロボットをブロックが傾いた環境に適用したところ、力触覚の応答が大きく変化するため、SOINN(R) 2.0モデルはブロックをなぞる挙動に失敗(図2)しました。
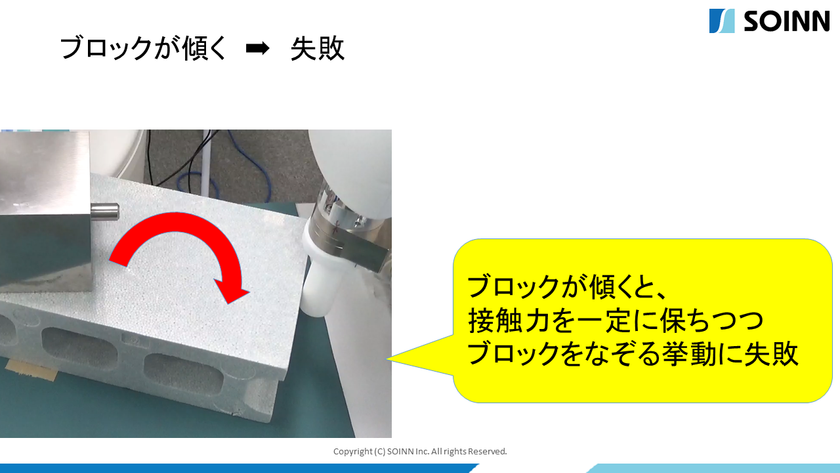
図2:ブロックが傾いた環境ではブロックをなぞる挙動に失敗
そこで、学習済みSOINN(R) 2.0モデルをブロックが傾いた新環境あわせて自己転移させる(図3)と、ブロックをなぞる挙動を再び生成できることを確認しました(図4)。
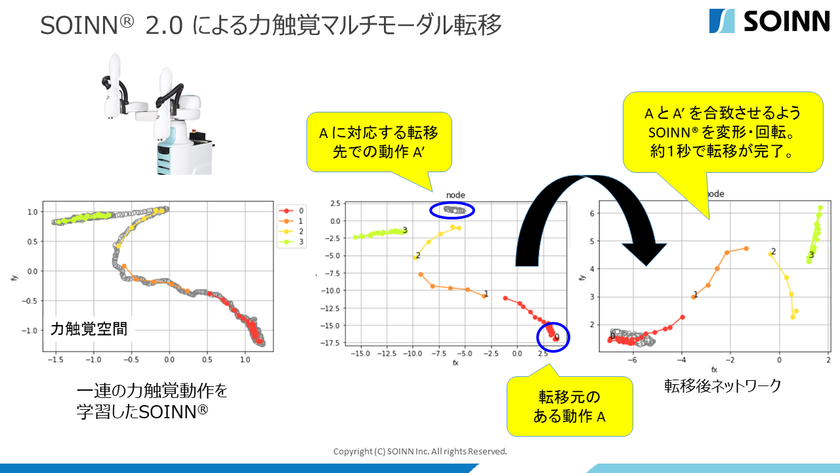
図3:SOINN(R) 2.0モデルの新環境への転移学習
図3:SOINN(R) 2.0モデルの新環境への転移学習
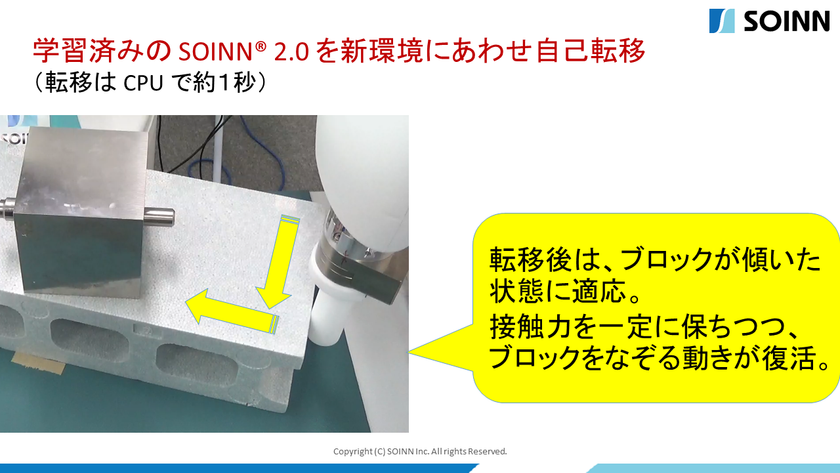
図4:新環境にあわせた自己転移によりブロックをなぞる挙動が復活
以下は、この「SOINN(R) 2.0 アルゴリズムを用いた、ロボットの力触覚マルチモーダル転移学習」のデモ動画です。
この検証に用いたPCのスペックは以下の通りです。
<OS>
Microsoft Windows 10 Pro
<プロセッサ>
Intel(R) Core(TM) i7-6700K CPU @ 4.00GHz、4001Mhz、
4コア、8ロジカルプロセッサ、メモリ(RAM):32.0GB
ブロックの周囲をなぞるマルチモーダルデータの初期学習、その後の転移学習、ロボットの挙動生成のための推論(フィードフォワード制御)に要した時間は以下の通りです。
元データの初期学習:約2.5秒
転移学習 :約1秒
推論サイクル :5ミリ秒以下
この技術はスカラーロボット、6軸ロボットの他、多様なマルチモーダル制御に展開可能です。
今後は、この技術を以下の通りに拡げ、2022年中のビジネス化を図って参ります。
1. 単一ロボット内での自己転移学習
2. 多少スペックの異なるロボット間での転移学習
■会社概要
商号 : SOINN株式会社
代表者 : 長谷川 修(はせがわ おさむ)
所在地 : 東京都町田市鶴間8丁目4-30
設立 : 2014年
事業内容: 特許技術「人工脳SOINN(R)」を含む先端AI技術を活用した
各種機器・装置・情報システムの知能化
URL : https://soinn.com/
![]()