
| ||||
|
|
川田工業、出渕裕氏デザインの2足歩行ロボット「Promet」公開
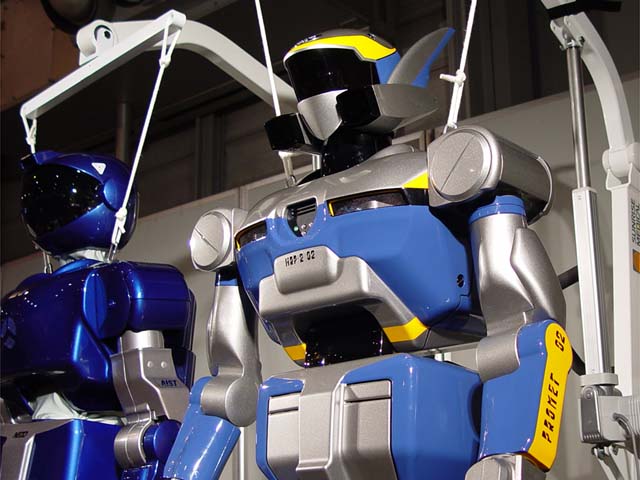
12月9日公開 川田工業株式会社は、独立行政法人産業技術総合研究所、株式会社安川電機、清水建設株式会社らと共同開発した2足歩行ロボット「HRP-2」の最終成果機を公開した。 HRP-2は経済産業省が実施している「人間協調・共存型ロボットシステムの研究開発」(HRP:Humanoid Robotics Project)の一環として開発された人間型ロボット。同プロジェクトは、働く人型ロボットの可能性を提示することを主眼とし、'98年から5カ年計画で進められているもの。2003年には最終的な研究成果が発表される予定。 HRP-2は、今年3月にプロトタイプとなる「HRP-2P」が公開、ロボット博覧会「ROBODEX 2002」でも一般公開が実施され、人間と共同で机を運ぶデモが公開されていた。また、9月には人間サイズのロボットとしては初めて「起き上がり」と「寝転び」の動作を公開。その運動性能の高さを実証している。 今回公開されたのは、そのHRP-2の最終形態とも言えるモデル。3月の発表時点で予告されていたとおり、「機動警察パトレイバー」などのメカデザインでおなじみの出渕裕氏によるデザインをもとに、最終的な仕上げが施された。また、出渕氏により「Promet(プロメテ)」という愛称も命名されている。
Prometは身長154cm、体重58kg(バッテリ含む)。関節の自由度は30自由度。手のひらの把持力は2kg(片腕)、過半重量は両腕で6kgとなり、基本的にはHRP-2Pと同等のスペックを備える。 内蔵のコンピュータは運動系と視覚系に1台づつ、合計2台のPC/AT互換機が搭載されている。CPUはPentium III 1.26GHz(HRP-2PはPentium III 1GHz)。 HRP-2PとPrometの主な違いは、連続歩行時間の延長や、不整地歩行に適した足首、足裏機構の開発、システム安定性の向上、電装システムや各デバイスのノイズ強化によるシステム安定性の向上、そしてボディ形状の小型化などが上げられる。 特に連続歩行時間は、従来約1時間だった歩行時間が、約2時間に延長された。これはバッテリ持続時間が延長されたということではなく、脚部に冷却機構を装備したことで、アクチュエーターの発熱を抑えることが可能になり、より長い連続歩行が可能になったという。 また、ボディの軽量化については、内部配線の基板化、専用バッテリパッケージの開発によって実現された。これにより、肩幅はHRP-2Pの650mmから620mmに、腰部パーツのサイズは、横325mm(従来比-16mm)、縦241mm(従来比-100mm)と、大幅に小型化された。そのため外見上は、HRP-2Pとはまったく別のロボットであるかのような印象を受ける。 今回もっともこだわりを見せている頭部には、3つのカメラが収められている。その配置はゴーグル内に1つ、アゴの左右張り出し部に1個ずつと、ユニークなもの。この配置により、HRP-2Pと比べるとかなり頭部が小さく、スマートな印象となっている。
会場では、Prometによる建築資材搬送のデモンストレーションも実施された。5m四方ほどのデモスペースに、Prometが機動警察パトレイバーのテーマソングとともに登場。まずはカメラを構える報道陣に挨拶すると、資材置き場へ旋回、人間とともに資材を輸送し、所定の位置に配置する様子が公開された。 輸送中は、人間の動きに同調する動きをするため、人間が右へ動こうとすれば右へ、左に動こうとすれば左へ移動する。また、音声による命令も可能で、デモの最終段階となる資材を立てかける動作は、オペレータによる音声命令を交えて実施された。 HRPの計画では今後、Promet(HRP-2)を使用して、デコボコや傾斜路などでの不整地歩行、転倒時の破損を最小限に抑えるための転倒制御、転倒状態から復帰するための転倒回復技術などの研究に利用される予定という。 また、川田工業により、研究開発プラットフォームとしての用途に限定した、同機のレンタル事業を開始する予定という。5年契約で、費用は約4,000万円程度。なお、すでに数社からオファーを受けているが、現時点では海外への貸出は考えていないという。 研究開発用ロボットながら、出渕氏デザインによる遊び心に溢れた「カッコよさ」を纏ったHRP-2 Promet。Prometが実用人型ロボットの先駆けとなるのか、2003年の最終成果に期待したい。 ■出渕裕氏ショートインタビュー
自分でデザインしたロボットが実際に動いているのを見てどう感じました? 出渕氏:なんだか実感が湧かない。自分では感覚的に言い表わせないところがある。 ただ、工業的なもので人と共同して作業するように開発されたものなのに、エンタテインメントっぽくしてしまったのは、意図的にやったことではある。実際にこうやってみてみると、そうして良かったと思う。 このデザインの物が実際に動くと楽しいですね
出渕氏:楽しい、楽しい(笑)。 実際には、これはインダストリアルなものだからあり得ないんけど。でも、一回そういう境界みたいなものを、ぶっ壊してしまいたいという気持ちはあった。やっぱり、見て楽しくないと。 デザイナーとして製造側へに何かリクエストはしましたか? 出渕氏:胸のバッテリの入れ方とかを、ちょっといじくらせてもらった。おかげでちょっとスリムになった。
■Prometの資材搬送デモ
◎Prometデモムービー(6分56秒:65MB) □川田工業 航空・機械事業部のホームページ (2002年12月10日) [Reported by kiyomiya@impress.co.jp / aoyama@impress.co.jp]
【PC Watchホームページ】
|
|||||||||||||||||||||||||||||||||||||||||||




















|
|