
|
|
働くロボット「HRP-2P」デモンストレーション公開
|
 |
9月19日公開
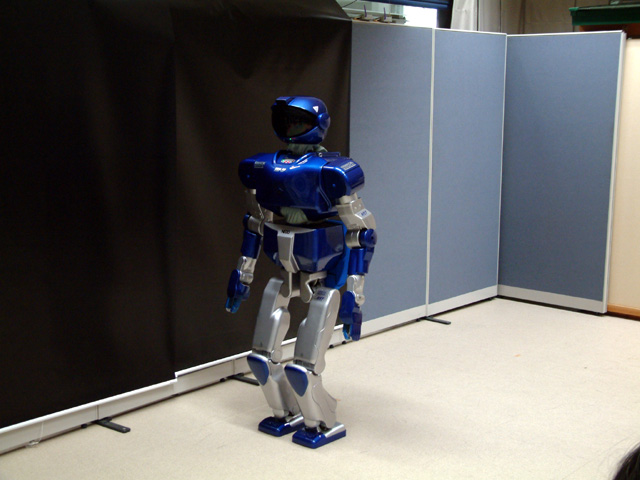
人間と共同作業ができるロボットの実現を目指して、経済産業省が推進する「人間協調・共存型ロボットシステムの研究開発プロジェクト(HRP)」。この一環として開発された「HRP-2プロトタイプ(HRP-2P)」は、ハードウェアを川田工業株式会社が製造し、ソフトウェアの開発を独立行政法人 産業技術総合研究所が担当している。
HRP-2Pは、ROBODEX 2002で人と一緒に机を運ぶデモンストレーションを行なうなど、ホンダのASIMOと並んで高い運動能力を誇る人間型ロボットだが、今回さらに開発が進んだことで人間サイズのロボットしては世界初となる「起き上がり」と「寝転び」の動作を実現した。
産総研内のスペースで公開されたデモンストレーションの流れは次の通り。軽く体操のように腕を頭上に伸ばす動きをしてから、まずは直立→うつ伏せ→直立の動作を行なう。続いて数歩移動して立ち位置を修正すると、今度は直立→仰向け→直立という動作を実行。そこから再び数歩移動すると、最後にはきちんと膝をついて報道陣に向かって深々とお辞儀をし、デモは終了。
これら一連のHRP-2Pの動きは、見ていると非常に人間に近く、同時にユーモラスで報道陣からもときおり笑いがおきていた。動き自体はモーションキャプチャーなどを用いて直接人間の動きを取り込んだのではなく、あくまでも人間の動きを参考にしながらシミュレータ上でロボットに最適な動きをシミュレーションした結果だという。
HRP-2Pが人間に近い動きが実現できたのは、腰の関節、バックパックのようなでっぱりのないボディ、そして全身を制御する新開発のソフトウェアによるところが大きく、これらがそろうことで人間のように重心移動の反動を利用した動作も可能となった。
●寝転び「直立→うつ伏せ」
 |
 |
 |
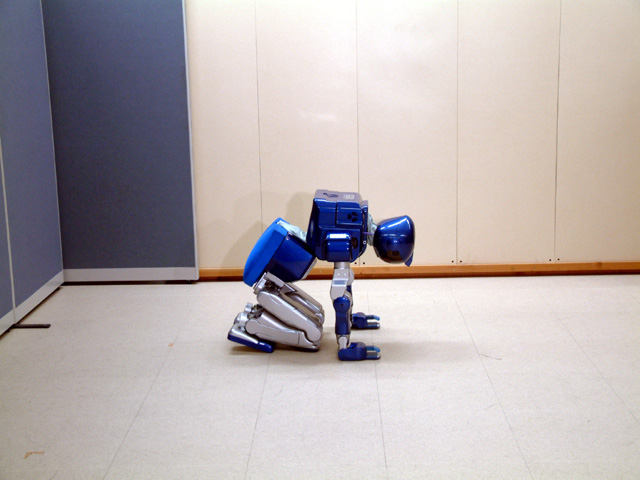 |
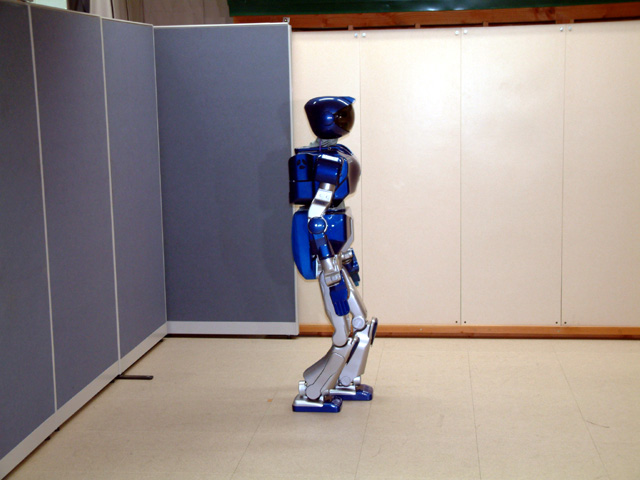
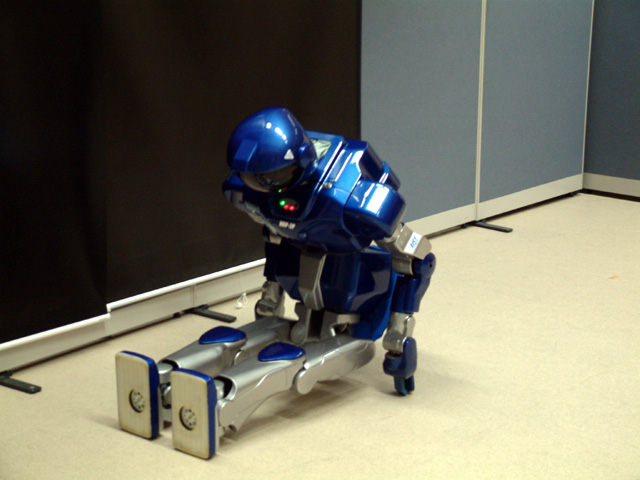
| 1,まずは直立で静止した状態 | 2,スッとしゃがみ込む、動作は意外に速い | 3,重心を前に移し膝をついて、正座に近い状態 | 4,腰関節から前屈して前に手をつく |
 |
 |
 |
 |
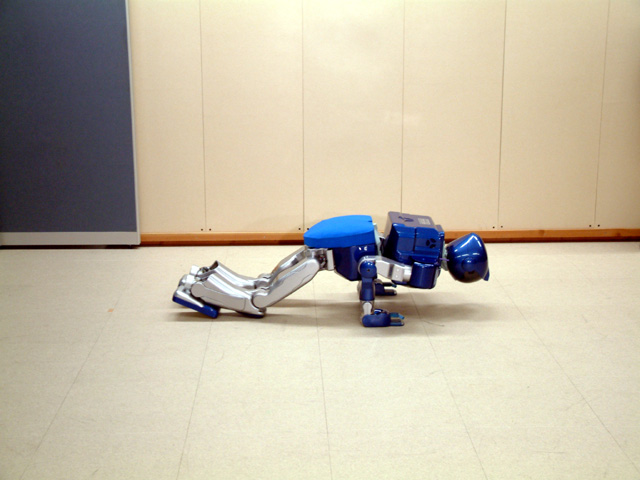
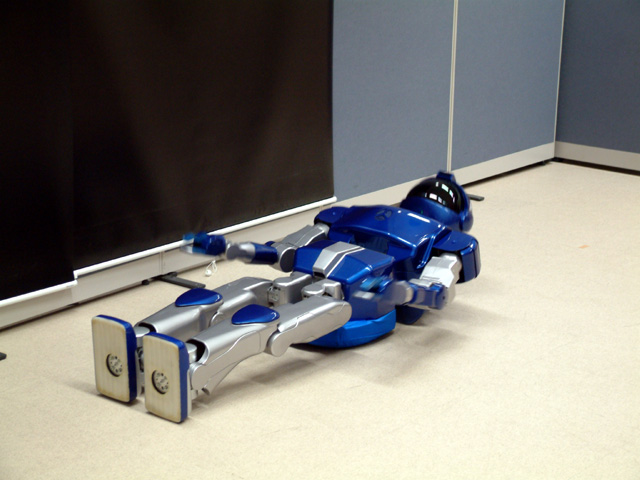
| 5,片方ずつ腕を前へと移動させる | 6,体全体を前へと押し出す | 7,腕立て伏せのように、ゆっくりと体を降ろす | 8,胴体が接地したら、両手を体の脇に揃えて、うつ伏せ完了 |
●起き上がり「仰向け→直立」
 |
 |
 |
 |
| 1,仰向けに寝っ転がっている | 2,腹筋運動のように上半身を起こす | 3,体の横に手をついて、腰を浮かす | 4,足を片方ずつ体の方へと引き寄せる |
 |
 |
 |
 |
| 5,左足に続いて右足も | 6,かがみ込んだ状態、妙に人間臭く見える | 7,上半身を起こして、蹲踞の姿勢に | 8,そのままスッと立ち上がる |
●ムービー
 |
 |
 |
| うつ伏せ |
仰向け | 正座してお辞儀 |
●転んでも自分で起きあがれるロボットを目指して
この「起きあがり」と「寝転び」の動作は、もともと人間と共同作業をする際に、不意のトラブルでロボットが転倒しても、自力で立ち上がって作業を続けることを目標として研究されてきたもの。
実は、ただ「起きあがる」だけならば、他のロボットでもすでに実現している。最近ではソニーのSDR-4Xも人に押されて後ろに倒れ込んだ状態から起きあがるデモを行なったのは記憶に新しい。また、先ほど開催された第2回ROBO-ONEでも、決勝トーナメントに進出したロボットのいくつかが実現しており、実際のバトルで大きな武器となるなど、個人のホビーレベルでも可能になっている。
しかし、これらの「起きあがり」が可能なロボットは、すべて身長が60cm以下のものに限られている。したがって、人間サイズ(身長120cm以上)で2足歩行可能なロボットとしては、HRP-2Pが世界で初めて自ら寝転んでから起き上がることのできるロボットになるという。
さらに実際に転んだときには、ロボット自体が壊れてしまわないように上手く転ぶ必要がある。人間ならばとっさに手が出たり、受け身を取ったりしてダメージを最小限にしようとするが、それをロボットにやらせようというもの。この「転倒制御」の研究も進められており、仮想プラットホームを用いたシミュレーションでは、ほぼ実現しているそうだ。ただし、今のところ1機しかないHRP-2Pを破損させてしまうと他の研究にも支障が出るので、実機を用いた「転倒制御」の研究は他の研究が終了してから行なわれる予定になっている。
 |
 |
 |
 |
| HRP-2Pの身長が154cm、横に経っている横井 主任研究員の身長が約165cm | 転倒時に大きな力がかかることを想定した分厚いクッション | 約58kgの体重を支える手。見た目以上に丈夫に作られている | 研究員の間ではHRP-2Pのことを「ピーちゃん」と呼んでいるそうだ |
●出渕デザインの最終モデルの完成は年末に
最後に、横井一仁 主任研究員に10月に公開予定の出渕裕氏デザインによる最終成果モデルの進捗状況について尋ねたところ、設計途中の仕様追加や、製造方法の見直しなどが重なって完成が予定よりだいぶ遅れてしまっているとのことだ。現在、川田工業の工場にて急ピッチで製造が進んでおり、年内ギリギリには公開できる見込みだという。
また、川田工業の五十棲隆勝 ヒューマノイドロボット・知能システム開発室室長によると、最終評価モデルは出渕裕氏のデザイン画をできるだけ忠実に再現することを目指しているという。完成時期が延びてしまったのは残念だが、年末にはより洗練されたHRP-2最終成果モデルが今年登場した数々のロボット達のトリを飾ることになりそうだ。
□産業技術総合研究所のホームページ
http://www.aist.go.jp/index_ja.html
□ニュースリリース
http://www.aist.go.jp/aist_j/press_release/pr2002/pr20020919/pr20020919.html
□川田工業株式会社のホームページ
http://www.kawada.co.jp/
□ニュースリリース
http://www.kawada.co.jp/general/topics/020919_hrp-2p.html
□関連記事
【8月12日】2足歩行ロボットの競技大会「ROBO-ONE」第2回開催
~人型ロボットが殴りあう!
http://pc.watch.impress.co.jp/docs/2002/0812/roboone.htm
【4月11日】産総研、働く人間型ロボット開発の中間成果を発表
~人間との共同作業や建設重機の代行運転などをデモ
http://pc.watch.impress.co.jp/docs/2002/0411/hrp1.htm
【3月19日】人と共同作業を目指すロボット「HRP-2プロトタイプ」発表
~9月には出渕裕氏デザインに生まれ変わり
http://pc.watch.impress.co.jp/docs/2002/0319/hrp2.htm
【3月19日】ソニー、2足歩行ロボット「SDR-4X」の技術説明会を開催
~製品化は年末を目標
http://pc.watch.impress.co.jp/docs/2002/0319/sony3.htm
(2002年9月20日)
[Reported by aoyama@impress.co.jp ]