
|
|
産総研、働く人間型ロボット開発の中間成果を発表
| ||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
4月10日公開
独立法人 産業技術総合研究所は10日、経済産業省が実施している「人間協調・共存ロボットシステムの研究開発(HRP:Humanoid Robotics Project)」の中間成果について、報道陣を招き、デモを公開した。
HRPは'98年から5カ年計画で実施されており、前期2年、後期3年のプロジェクトになっている。前期の2年間で基礎研究開発を行ない、主に人間型ロボットHRP-1や遠隔操作コクピット、仮想ロボットプラットフォームなどの開発が行なわれた。これらの技術をもとに、現在は後期の3年間として「対人サービス」、「ビル・ホーム管理サービス」、「屋外共同作業」、「産業車両代行運転」、「プラント保守」の5つの応用分野の研究を進めている。
2002年3月で後期の2年が経過したため、今回はこれら後期の研究成果について中間発表が行なわれることとなった。研究期間の最後となる2003年には最終的な研究成果を改めて発表する予定としている。
発表会冒頭ではまず、新エネルギー・産業技術統合開発機構(NEDO)の畑 幸宏氏が挨拶。「今日はこれまで研究してきた成果の中間発表をさせていただく。日本は世界の産業ロボットの5割を製造しており、ロボット大国といえる。だが、HRPではそれら産業ロボットではなく、人間と共存して、人間の役に立つロボットを開発するのが目的だ。研究期間は残り1年だが、来年はさらに明確な成果を発表できる」、「HRPを推進していくことで、ロボットが人の役に立つことを実証したい」などと語った。
 |
 |
| 新エネルギー・産業技術統合開発機構の畑 幸宏氏 | プロジェクトリーダーの井上博允 教授(東京大学) |
引き続き、HRPのプロジェクトリーダーである、東京大学の井上博允 教授が登壇し、HRPの概要について説明した。
「今回のプロジェクトは、経済産業省としても新しい研究開発の方式として「プラットフォーム提供型」という方式でスタートした。通常はまず要素技術を開発してから、それをもとにシステムを作り、最終段階に至ることが普通。だがその方法では、4~5年経つと技術が旧式化してしまうことがある。今回のプロジェクトでは、いろいろな応用が可能な、共通基盤となるプラットフォームの開発から行なった。その上に新しい技術を導入し、再び応用技術を積み重ねていくという方式を採った。プラットフォーム開発は前期2年間で行なわれ、後期3年でこれらのプラットフォームを使った応用技術を開発している」
「このプロジェクトは非常に順調に進んでいる。世界中をみても(2足歩行ロボットに関して)これだけの施設を備えているところはない。現在、2足歩行ロボットに関してはアメリカやヨーロッパは日本の開発速度に追随できておらず、結果として日本の一人舞台となっている」と、プロジェクトの進捗状況について自信をもって語った。
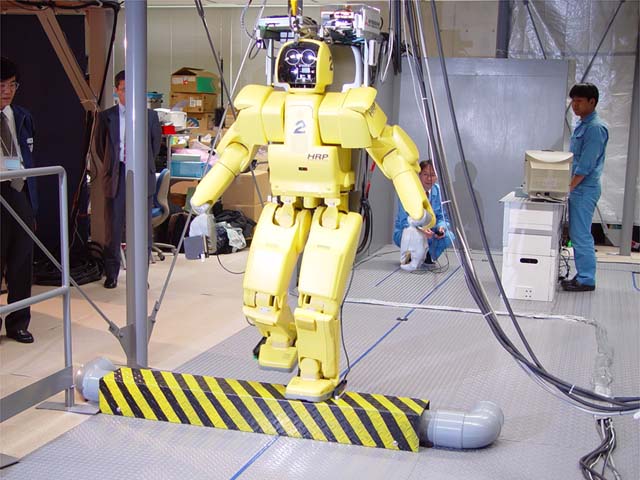
現在研究に使われている「HRP-1」及び「HRP-1S」はホンダの2足歩行ロボット「P3」をベースに開発されている。ホンダはHRPの前期開発過程でプロジェクトに参加していた。
'97年12月にホンダからP2が発表された時点では、前期開発の真っ最中であったが、P2が発表された段階でも国内企業の見方はヒューマノイド型ロボットに対する意識は半信半疑で、腰が引けたような状況だった。その後、ホンダの2足歩行ロボットはP3、ASIMOと発展し、ソニーからSDR-3X/4Xが発表されるなど、多くの企業が参入してきた。HRPを企画している段階では、ここまでになるとは思わなかったという。
ROBODEX2002開催直前に公開され話題を呼んだ、「HRP-2プロトタイプ」については、後期開発から参加した川田工業などの手によるものだが、HRP-1で開発されたプラットフォーム技術を流用することで、開発期間が実質1年程度であるにもかかわらず、これといったトラブルもなく開発されたという。
HRP-1S及びHRP-2はヒューマノイド型ロボットのシミュレータ及び制御ソフトウェア「OpenHRP」を使用して開発されている。OpenHRPは、実機が存在しない場合でも、ある程度までの開発を仮想空間内で行なうことができるソフトウェア。
シミュレータ上で開発したソフトウェアがそのまま実機にも導入できるほか、分散オブジェクトシステム「CORBA」にも対応するため、ネットワーク上にさまざまなアーキテクチャを分散させながら、それらを相互に運用することが可能になっているため、拡張性に優れるという。
OpenHRPはWindows 98/Me/NT 4.0/2000及びLinux上で動作し、ロボット側ではART-Linux上で稼働している。
井上教授は、OpenHRPについて、「HRP-2には仮想ロボットプラットフォーム開発の成果が活かせた。HRP-2では、ハードウェアができてから2~3週間で驚くほどの成果を見せてくれた。1年後にはどうなっているか楽しみだ」と、今回の開発にはソフトウェアも重要な要素であったことを説明した。
また同教授は、「従来はロボットといえば工場で働く産業用ロボットが主であったが、昨今発表されるエンターテイメントロボットは、従来のロボットメーカー以外から発表されている。これはロボットが確実に身近に、家庭内や日常生活に入ってこようとしている前兆だといえる。HRPはいろいろな技術インフラを開発して大学や企業に提供し、ヒューマノイドロボット技術の底上げをする、苗床を作るような仕事で、やや地味な仕事だが、これらを提供するおかげで、各企業も安心感をもって取り組めるようになる」、「標準的なプラットフォームを作っていくことで、国際的な主導権を握っていきたい」と語り、最後に「HRP-2とOpenHRPによってヒューマノイドロボットの技術は加速していく」として締めくくった。
HRP-2は完成後、オープンアーキテクチャとして、ハードウェア、ソフトウェアの技術がすべて公開されるという。
1. 対人サービス
介護現場で働くロボットを想定したもの。専門知識がなくても、簡単な操作でロボットを動かすためのシステムや、患者との会話から音声コマンドを認識して行動したり、体操のインストラクションなども行なえるようにするという。
将来的には対話機能をさらに発展させ、ロボットと患者の間で会話ができるようにすることや、動きをさらに人間に近づけて、複雑な動作も可能にするという。
デモでは、実際に音声で見舞い客を患者の部屋へ案内したり、遠隔地にいる友人と患者が会話するといったものが行なわれた。HRP-1Sは遠隔地の友人の音声をモニタしており、「さようなら」と発音されるとそれに会わせてHRP-1Sが手を振るという動作もする。
 |
 |
| ロボットの頭部に設置されたモニタをつかって遠隔地にいる人間と対話 | 「薬をとってきて」と命令されて薬をつかんだところ |
 |
 |
| 患者まで薬を運ぶ | 体操のインストラクターにも |
2. ビル・ホーム管理サービス
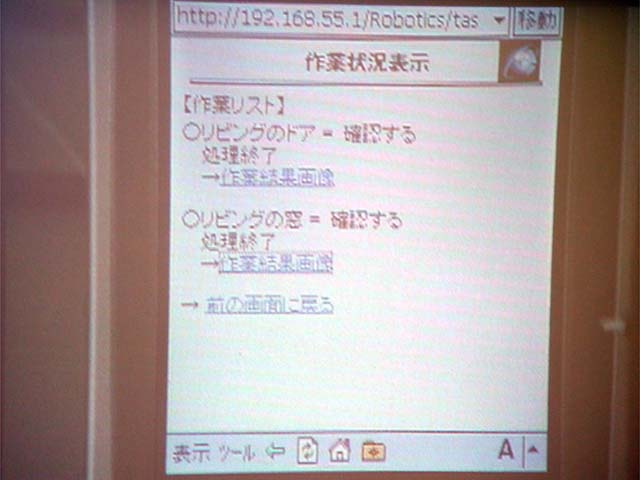
人間とともに共存し、人間の分身として行動させるための研究。外出先からPDAやPHSなどを使ってコントロールすることも可能で、鍵の施錠や、窓の開け閉めなど、人間の代わりに仕事ができるようになることを目指す。
実際にロボットを行動させるには、「トラッキングビジョン」と呼ばれる処理によって、あらかじめ家の中の部屋や家具、ドアや窓などの位置とそれぞれの場所での作業項目をロボットに記憶させる。そのうえで、外部からの命令により作業を実施する。
 |
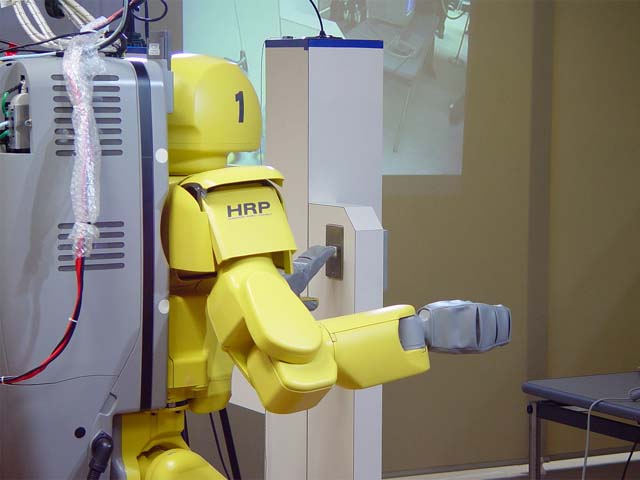 |
| 「窓」を認識しているところ | 遠隔地からの命令に従ってチャイムを押したところ |
 |
 |
| PDAからの操作。Web形式の簡単な操作で命令できる | |
3. 屋外共同作業
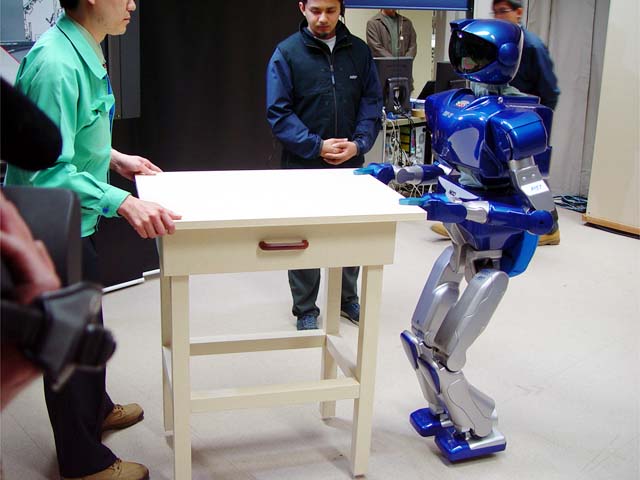
人間と共同で屋外作業をすることが目的の研究。3台のカメラによる、物体の位置認識や、腕の力制御、音声認識による命令受信、不整地での歩行などが可能になる。建設現場などで作業が行なえるようにするためのもので、研究終了までには、屋外でのパネル搬送、住宅などの外壁の組み付けなどが人間と一緒にできるようにするという。
デモにはHRP-2が使用され、実際に人間と共同して机を運んだ。ここでは人間が動く方向に合わせてロボットが移動方向を判断し、自律的に移動するため、人間は特に音声による命令などを与える必要はなく、運びたい場所まで移動すればいい。
 |
 |
 |
| 机を認識中 | 人間の移動方向に合わせて机を運搬 | |
4. 産業車両代行運転
人間が運転する建設用重機などを、そのままロボットが代行運転するための研究。災害発生時など危険な場所でも人間の代わりに人間と同等の作業ができるようにするという。
乗り込みから着座するまでの一連の動作や、建設重機内の各種レバーの操作のほか、衝撃や自然環境からロボットを守る技術や、遠隔操作装置の小型化なども研究されている。
操作は専用の遠隔操作装置を使って人間が遠隔地から直接行なう。デモでは実際にHRP-1Sを遠隔操作して、重機を動かす様子が公開された。遠隔操作装置のモニタは裸眼で立体視が可能な液晶モニタが使われている。左右の視野差を作り出す特殊なレンズを使用しており、正しい位置からモニタを見ないと正確な立体視が得られない。そのため、操縦者が額に付けたヘアバンドの位置をモニタ側が認識して、頭部の位置を計算し、それに合わせて立体視像を造り出すことで、操縦者は常に正しい映像を見ることができる。
 |
 |
 |
| 重機のレバーを操作するHRP-1S | 遠隔操作装置で、HRP-1Sの手足を操作する | 実際に動いていたのはこちらのリモコンショベルカー |
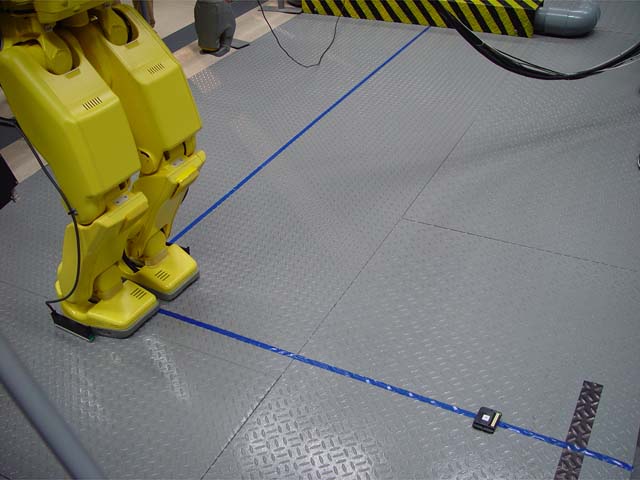
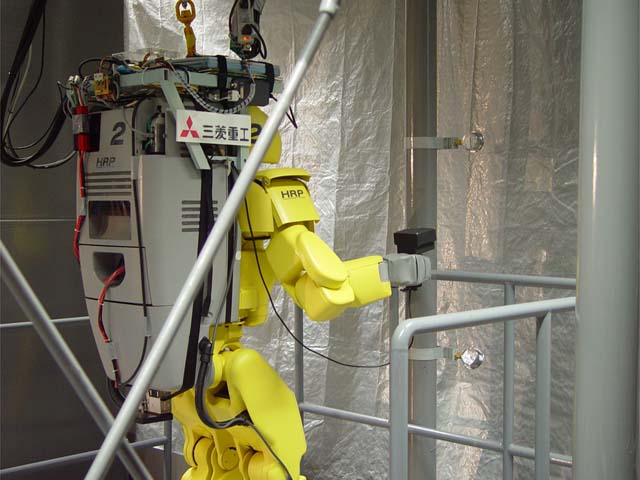
5. プラント保守
プラントの保守点検などを人間に代わって行なうための研究。階段やパイプなどによる段差の有無、点検箇所の情報などを、あらかじめ設置した専用のICタグ経由でロボットに伝送する。ロボットはそれらの情報を読みとることで、障害物などへ対処できるようになる。また、突発的な事故が起こった場合などには、人間による遠隔操作も可能。
デモでは、障害物が設置されたルート上に、ICタグを設置し、それらの情報をHRP-1が読み取りながら移動。途中、人間からのマニュアル操作を受け、その後に巡回動作へ復帰する様が公開された。
 |
 |
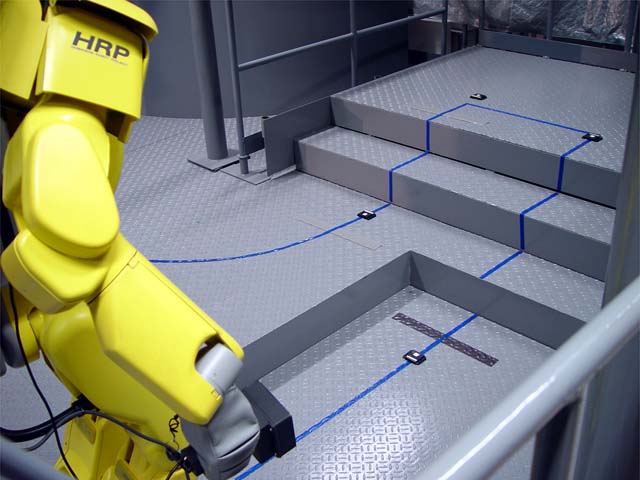 |
| ICタグの情報をもとに障害を乗り越えるHRP-1S | 小さな黒いチップ状のものがICタグ。2.4GHz帯のマイクロ波でデータを送信する | |
 |
 |
 |
| 計器を確認中のHRP-1S。右はカメラからの映像 | 遠隔操作はゲームパッドで行なっていた | |
デモ終了後の質疑応答では、まずOpenHRPのキーポイントについて質問がされ、「ロボットの制御をシミュレータ上で実験できる統合システム。パソコンで言えばOSに相当する。パソコンはPC/AT互換機にWindowsが搭載されて発展してきたが、OpenHRPもそうなるかもしれない」と説明した。
また、HRP-1とHRP-2の違いについても質問がされ、「HRP-1についてはホンダのP3をベースにしている。ホンダから提供されるソフトウェアの範囲で使うことはできるが、ブラックボックスといえる部分も存在し、コマンドレベルでの制御しかできない。たとえば、2足歩行だけなら既存の制御で可能だが、手すりをつかみながら歩く場合などには、力学系がまったく違ってくる。高度なことをやるためには、サーボレベルからの制御が必要で、それを可能にしたのがHRP-1S(Sはサーボ)だ。HRP-2についてはすべての制御が可能になっており、初めてオリジナルのプラットフォームが完成したといえる」
「この種の2足歩行ロボットの適正な価格はいくらだと思うか?」という質問がされると、これに対し井上教授は「学会ならばズバリ言うところだが、今日はプレスが相手なので、誤解されて数字が一人歩きすると怖いので言えない」と渋りながら、「いくらくらいなら買いますか?」と逆に質問して記者団から笑いが起こる場面もあったが、「10~20年くらい先だったら、乗用車1台くらいの値段だといいと思う。若い人はいろいろな利便性から車を買うわけだが、高齢者は自分を介護してくれるロボットを買うようになるかもしれない」と語った。
井上教授は最後に、「ロボットの産業は単に商品を売るだけでなく、それを介して新しいサービスを売るものだと考えている。そうならないと人間を手助けするような働くロボットにはなっていかないと思う。サービスを売る産業になる場合、ロボットを作る人、修理する人、ソフトウェアを作る人、ロボットを売る人、コンサルティングをする人、中古ロボット販売をビジネスにする人など、沢山の仕事が発生する。ロボットが普及すればそういったすそ野の広い新しい産業を生み出すことにもなる」、「製造会社だけが儲かってもしかたがない。どれだけ雇用機会を生み出せるかも重要だ」と、今後四半世紀くらいにわたってロボット産業が担うかもしれない役割について語り、発表会を締めくくった。
2足歩行ロボットというと、現時点では技術開発やエンターテイメント性が先行し、ビジネス面での話題はあまり聞かれない印象があるが、今回の発表会は、具体的に汎用型の2足歩行ロボットを産業として立ち上げていこうとする意気込みが感じられるものとなった。
□産業技術総合研究所のホームページ
http://www.aist.go.jp/
□ニュースリリース
http://www.aist.go.jp/aist_j/press_release/pr20020410/pr20020410_0.html
□OpenHRPのホームページ
http://www.is.aist.go.jp/humanoid/openhrp/Japanese/
□関連記事
【3月19日】人と共同作業を目指すロボット「HRP-2プロトタイプ」発表
~9月には出渕裕氏デザインに生まれ変わり
http://pc.watch.impress.co.jp/docs/2002/0319/hrp2.htm
□ロボット関連記事リンク集
http://pc.watch.impress.co.jp/docs/2002/link/robo02_i.htm
(2002年4月11日)
[Reported by kiyomiya@impress.co.jp]
|