2024年4月8日 10:00
ソニーセミコンダクタソリューションズ株式会社は、ソニー独自のマルチIMU合成技術を搭載した、低バイアス変動および低ノイズ密度で、過酷な環境下でも信頼性の高い小型高精度なマルチIMUボードをSPRESENSE向けに開発しました。
●IMUの概要紹介
本マルチIMUボードは、3軸加速度センサー及び3軸ジャイロスコープから成る6軸IMUボードです。ソニー株式会社 技術開発研究所が開発したマルチIMU合成技術により、工業用光ファイバジャイロスコープ(FOG※3)に匹敵する低バイアス変動および地球自転検出可能な低ノイズ密度を実現しました。本モジュールでは16個の民生MEMS IMUをリアルタイム合成することで、工業用FOGに匹敵するバイアス安定性0.39deg/h以下を達成し※4、大幅な軽量、小型、低コスト化が可能になりました。これにより従来工業用FOGを搭載することが難しかった構造物検査用ドローンや小型自律移動ロボットなど、より緻密な制御を必要とする用途にも適用することができます。
本ボードは最大2枚をスタッキングすることができ、最大32個のIMUの出力を合成することでさらなる精度向上が可能です。
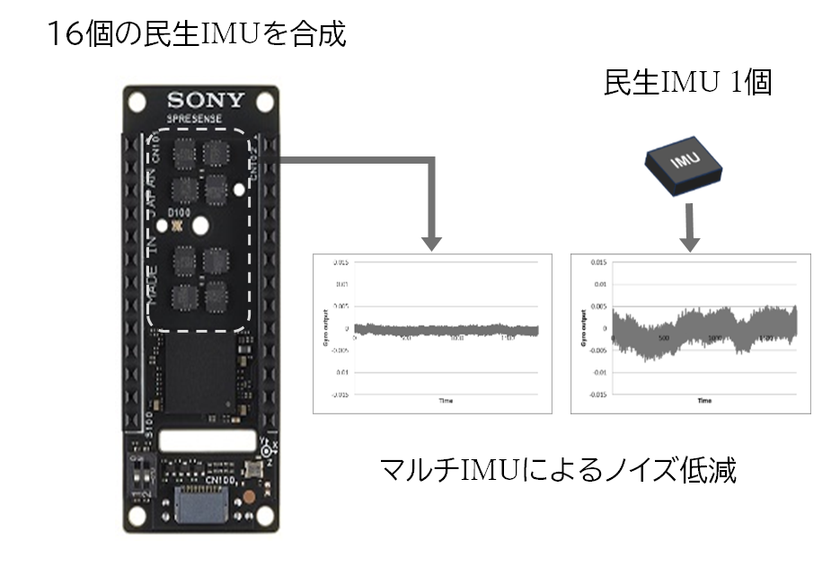
マルチIMUによるノイズ低減
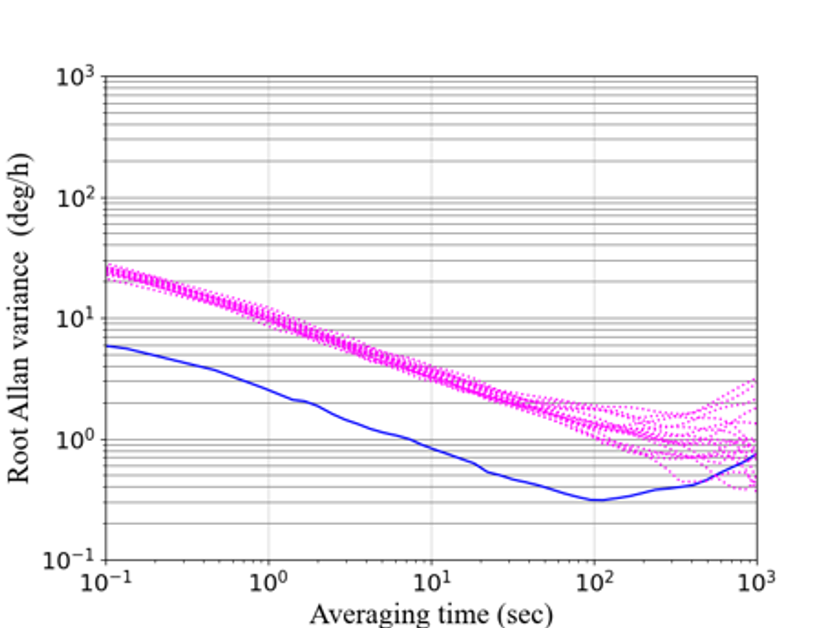
16個合成時のアラン分散の例
●IMUの想定するアプリケーション
低バイアス変動の特長により、長時間の使用においても安定した姿勢値を得ることができます。例えば、屋内ナビゲーション、自動搬送機、ドローン、モーションキャプチャ、小型衛星の姿勢制御などに効果的です。また低ノイズ密度の特長により素早い動きを精緻に捉えることができるため、ドローンの飛行制御やモーションキャプチャなどにも適しています。さらに複数IMU構成を取っているため、過酷な動作環境下でも故障に強く、信頼性を向上させる冗長信頼性を有しています。
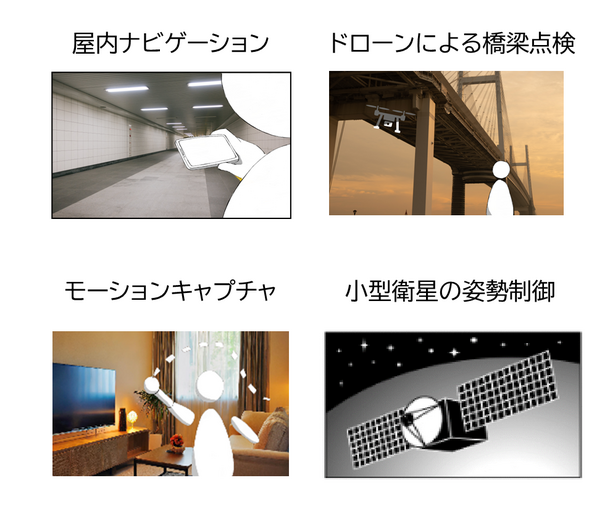
想定アプリケーション例
●GNSS※5とのフュージョン
本IMUボードはGNSSと融合することで高い測位性能を発揮することができます。
近年、自動運転やドローンなど自律移動ロボティクス用途の広がりに伴い、GNSSが受信できない場所でのデッドレコニング※6として、IMUによる高精度な位置姿勢トラッキングの重要性が増しています。
SPRESENSE(TM)の持つGNSS機能と融合することで、IMUセンサーデータとGNSSデータをリアルタイムに取り込みながら、GNSS複合慣性航法を実行することが可能です。これにより例えば移動体がトンネルなどの遮蔽物によりGNSS電波が受信できない状況においても、高精度な位置姿勢トラッキングを継続することが可能となります。
●IMUの仕様概要
<主な特長>
■高精度
・低バイアス変動:ドリフト誤差0.39deg/h以下(IMU16個合成時)
・低ノイズ密度:1.0mdps/√Hz以下。地球自転検出によるジャイロコンパス実現可能
・2枚スタック(IMU16個合成を2段で32合成出力)により更に高精度化可能
・キャリブレーション済み出荷
■高いロバスト性
複数IMUの冗長信頼性により故障に強い。多数決論理回路によるリアルタイム異常値除去
■基本仕様 (開発品における参考数値)
サイズ(予定)[mm] :50×20.6×9.1
重量(予定)[g] :10
出力レート[Hz] :~1600
出力インターフェース :SPI
動作温度[℃] :-20~65
消費電力[mW] :68/128※7
ダイナミックレンジ ジャイロ[dps]:~2000
加速度[G] :~16
ノイズ密度 ジャイロ[mdps/√Hz] :1.0/0.7※7
加速度[uG/√Hz] :14/9.8※7
バイアス安定性 ジャイロ[dph] :0.39/0.27※7
加速度[uG] :4.43/3.13※7
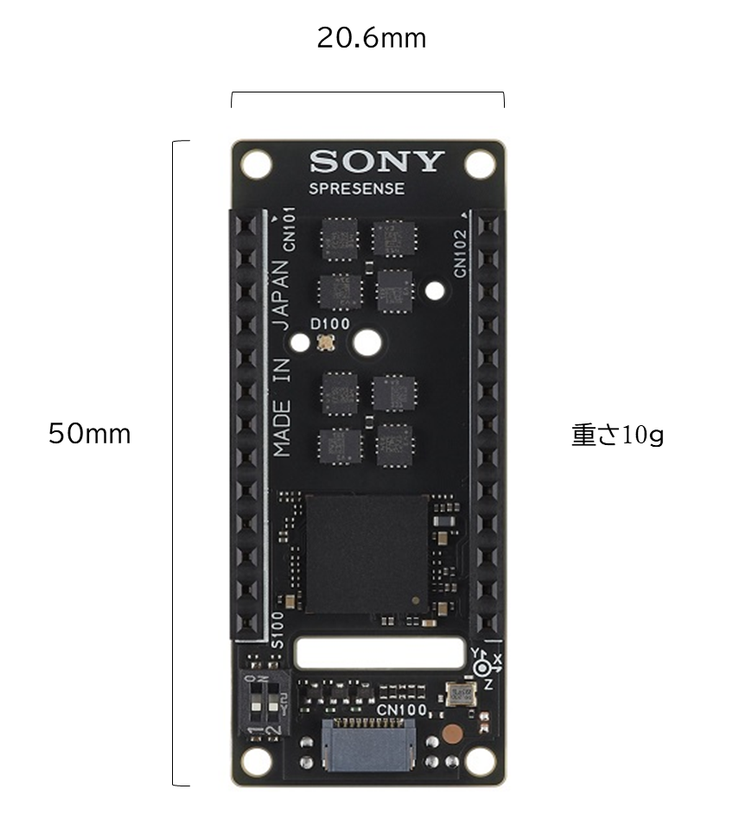
開発品(マルチIMUボード)
開発品(マルチIMUボード)
●お問い合わせ
https://www.sony-semicon.com/ja/products/spresense/index.html
※1:Inertial Measurement Unit。3次元の慣性運動を検出する装置
※2:SPRESENSEは、ソニーグループ株式会社またはその関連会社の商標または登録商標です。
※3:Fiber Optic Gyroscope
※4:関連発表論文
“H. Kamata, M. Kimishima, T. Sawada, Y. Suga, H. Takeda, K.Yamashita, and S. Mitani, MEMS Gyro Array Employing Array Signal Processing for Interference and Outlier Suppression, IEEE Inertial 2020, Hiroshima, Japan”
“M. Kimishima, T. Sawada, A. Sonoura, T Amano, H. Kamata, K. Yamashita, Highly Accurate Inertial Navigation that Compensates for the Earth's Rotation and Sensor BIAS Using Non-Holonomic Constraints, IEEE Inertial 2023, Hawaii, USA”
※5:Global Navigation Satellite Systemの略で、衛星測位システムのこと
※6:Dead Reckoning。移動体内部のセンサー情報のみで自己位置推定すること
※7:2枚スタック時(IMUを32個合成時)の数値
![]()