2024年11月12日 09:00
※1 カメラとLiDARの光軸を一致させ、ワンユニット化したセンサ開発において。2024年10月、京セラ調べ
※2 現在商用化が公表されているLiDARの照射密度において。2024年10月、京セラ調べ
京セラ株式会社(代表取締役社長:谷本 秀夫、以下:京セラ)は、世界で初めて※1カメラとLiDARの光軸を一致させ、ワンユニット化した「カメラ-LiDARフュージョンセンサ」を開発しましたのでお知らせいたします。
「カメラ-LiDARフュージョンセンサ」は、京セラ独自の光学設計を用いて、カメラとLiDARを一つのセンサとして統合しており、視差のない重畳データをリアルタイムで取得可能です。また、LiDARセンサとして世界最高※2のレーザー照射密度を実現し、長距離かつ高精度な物体検知を可能にしました。
独自開発のMEMSミラー
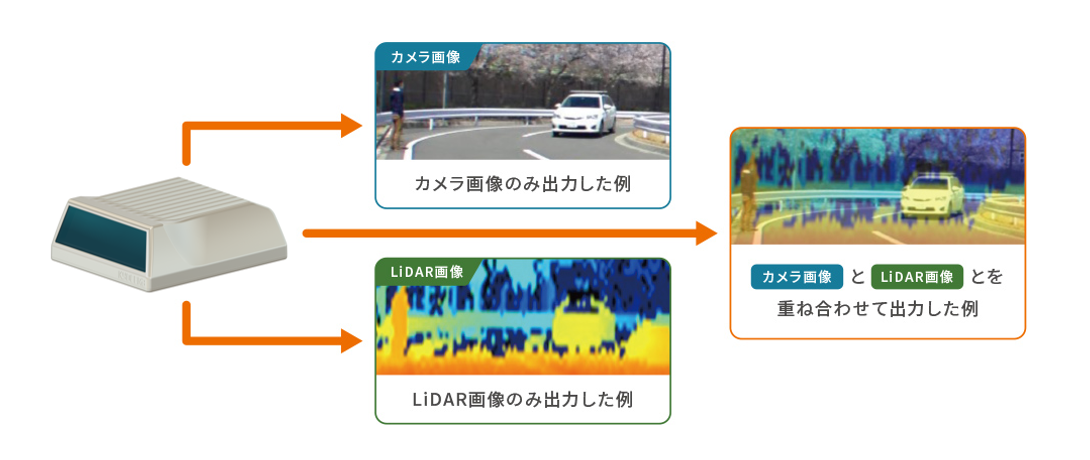
「カメラ-LiDARフュージョンセンサ」による検知結果 イメージ
■開発の背景
自動運転など、モビリティの自律化に向けてさまざまなセンシング技術が開発される中、複雑な環境や高速移動中に障害物を正確に検知するために、長距離かつ精度の高い3D情報を瞬時に取得できるLiDARは、必須のデバイスとされています。
LiDARはレーザー光を広域で照射し、反射光が跳ね返ってくる時間や角度から、物体までの距離やサイズなどを特定する優れた空間認識能力を持っています。しかし、対象物が何かをより正確に把握するために、カメラと併用されるケースが多くあります。従来は、別々のユニットであるカメラとLiDARから得られるデータに視差があるため、センサ間のキャリブレーション※3が必要となり、遅延を引き起こすことが課題とされていました。
京セラはこの課題を解決するため、カメラと高解像度LiDARをユニット内で一体化し、視差のないリアルタイムのデータ統合を実現した「カメラ-LiDARフュージョンセンサ」を開発しました。
※3 複数のセンサや機器が同じ基準で測定できるように、測定結果に生じるズレを調整してデータを一致させる作業
■「カメラ-LiDARフュージョンセンサ」の特長
(1)カメラとLiDARのワンユニット化により、検知結果を視差なくリアルタイムで統合
独自の光学設計技術により、カメラとLiDAR、2つのデバイスを一つのユニットにおさめ、光軸を一致させることに世界で初めて※1成功しました。これにより、それぞれの検知結果を統合させるプロセスが非常に容易となり、遅延なくリアルタイムにカメラの画像データとLiDARの距離データを統合し、高度な物体認識を可能にしました。
(2)世界最高※2のレーザー照射密度により、高解像度を実現
LiDARは、レーザー光を照射する密度を高めることにより解像度が上がり、長距離の小さい障害物なども認識できるようになります。京セラの「カメラ-LiDARフュージョンセンサ」は、複合機・プリンターなどの開発で培ってきた独自のレーザースキャンユニットの技術を応用することで、世界最高※2となる0.045度の照射密度を実現しました。これにより、100m先の30cmの落下物も検知することが可能です。
(3)独自のMEMSミラーによる高耐久性の実現
LiDARにおいて、レーザー光を広範囲・高密度で照射するためにMEMSミラーもしくはモーターが必要となります。しかし、MEMSミラーは解像度が低く、一方モーターは高解像度ながら摩耗が早いという課題がありました。京セラの「カメラ-LiDARフュージョンセンサ」は、レーザースキャンユニット技術による高解像度と同時に、当社がこれまでセラミックパッケージの製造・開発で培ってきた技術を応用した独自開発のMEMSミラーを採用することにより、モーター式を上回る高解像度と、従来のMEMSミラーを上回る耐久性の両立を実現しました。自動運転車両の障害物検知はもちろんのこと、船舶や重機など、さまざまな環境下での高精度なセンシングをサポートします。
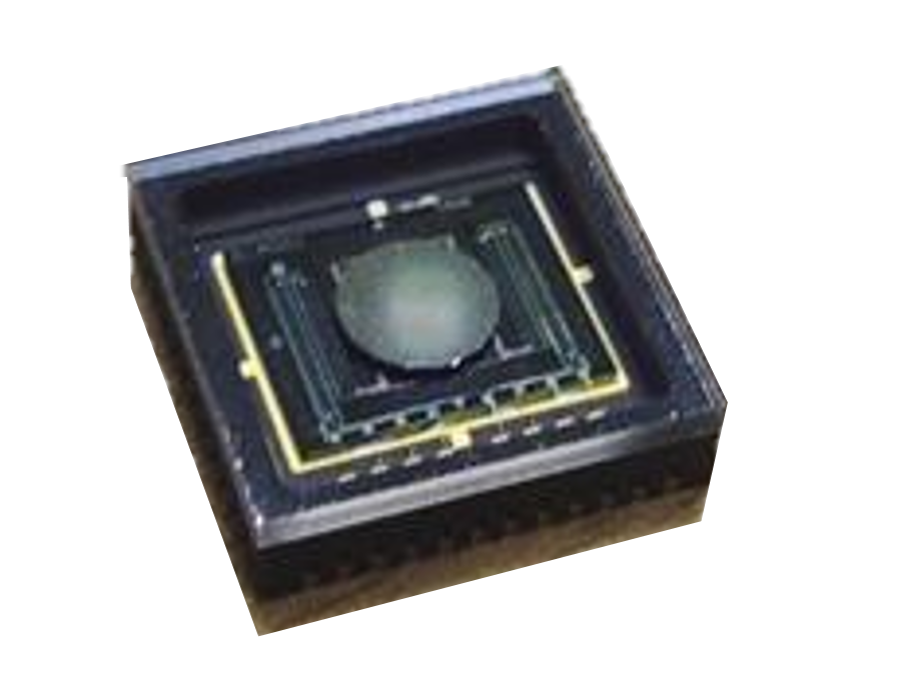
独自開発のMEMSミラー
(4)用途ごとに最適化したカスタマイズが可能
MEMSミラーから、光学系、電気回路、ソフトウエアまで自社で開発しているため、用途に合わせたカスタマイズが可能です。
■今後の展開
今後、当社は車載のみならず、建設機械や船舶、ロボットなどのモビリティのほか、人や物を認識するセキュリティシステムなど、さまざまな分野での導入を目指し、本デバイスの早期製品化を目指してまいります。
![]()