
|
|
ソニー、2足歩行ロボット「SDR-4X」の技術説明会を開催
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
3月19日発表
 |
| 冒頭で挨拶するソニー株式会社執行役員上席常務 土井利忠氏 |
ソニー株式会社は19日、2足歩行ロボット「SDR-4X」の報道者向け技術説明会を開催した。
説明会では、同社執行役員上席常務の土井利忠氏が「前回のSDR-3Xの発表からすでに2年近くが経過しているが、その間にソニーは何をしているのか? という質問をよくされた。SDR-4Xがその答えになる」と挨拶した。
同氏は、「前回の発表からだいぶ日にちがたってしまったが、今回ようやく発表できる段階にまで開発した」、「我々のロボット開発は単なる技術開発ではなく、商品化のための開発で、SDR-4Xはそのプロトタイプといえる。このまま順調に行けば、2002年の年末には商品化できるかもしれない」と述べ、今回のモデルについてはあくまでAIBO同様、一般市場向けへの展開を考えていることを明らかにした。
ただ、一般市場向け製品の開発と、技術デモ用とでは、開発にかかる労力はまったく異なると説明し、「一般製品化するためには、人間と共同で生活できるものを開発しなければならない。例えば、ロボットの関節に子供が指を挟んで怪我するようなことがあってはならない。また、家庭内にはさまざまな障害物があり、それらを自分で回避できるような自律的なシステムが不可欠になる」と説明した。
同氏は、製品化のためのコンセプトとして、「簡単に転ばない」、「壊れない」、「転んでも自分で起き上がる」という3点を上げた。簡単に転ばないためには、障害物の認識や、その回避できること、人に押された場合などに、後ずさりなどをして重心移動が行なえる必要がある。壊れにくくするためには、転んだ場合に「受け身」のような動作をとれること、また、転倒した場合には、どんな姿勢からでも自力で起きあがれるようにする必要があると説明した。
 |
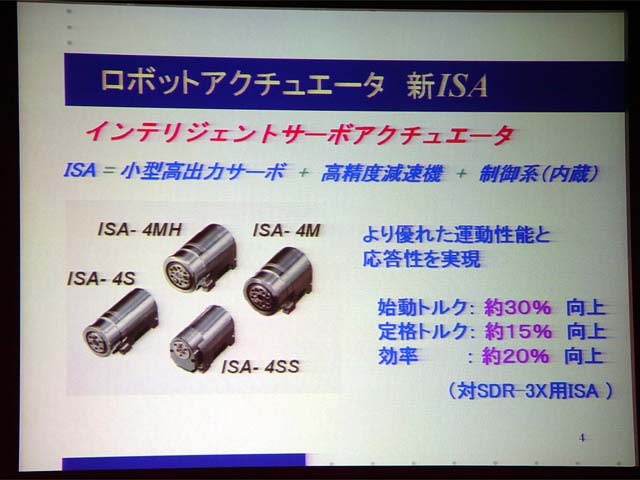 |
| SDR-4Xの基本構成 | 改良が加えられたアクチュエータ |
現時点のSDR-4Xで、これらすべての動作が可能なわけではないが、会場で公開されたムービーでは、前のめりに倒れた瞬間、両手を前につきだして体を支え、完全に転倒するのを防ぐシーンもあった。
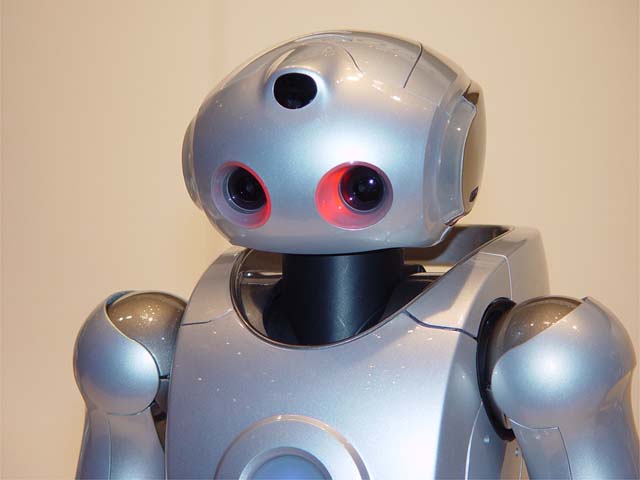
SDR-4Xでは、視覚センサーに2個のカメラを搭載している。そのため高度な立体視処理をしていると説明し、「AIBOでは床の模様を、溝などと誤認識してしまって立ち往生してしまう、ということが起こった。SDR-4Xでは立体視処理をすることで、模様か、実際に溝があるのか、ということも自分で認識できる」と述べた。
また、音声認識についてはSDR-4X本体に7基のマイクを設置することで360度どこから発生した音であるかを認識でき、自分を呼んだ相手がどこにいるかを理解できるという。
最後に土井氏は、「これまでのヒューマノイドロボットのほとんどはリモコン操作のものだった。ソニーはあくまで自律ロボットを目指している。SDR-4Xには感情があり、本能がある。それに基づい自分で計算をして行動することができるものだ」と語り、「ロボットが人間にとってのパートナーとなることを目指して今後も開発を続けていく」として締めくくった。
 |
 |
 |
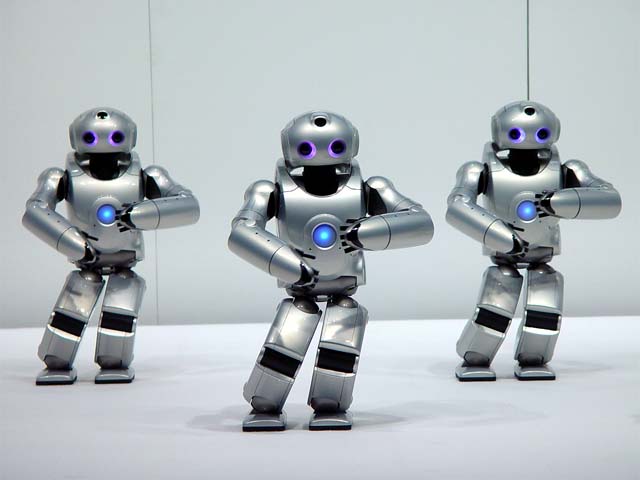
| デモ終了後に展示された3体のSDR-4X | 5本の指はきちんと動作する | 胸部のアップ |
 |
 |
 |
| 背面には“SONY”のロゴ。運搬時には上部に取り付けられた手すりをつかんでいた | 脚部を背面から | 本体側面 |
 |
 |
 |
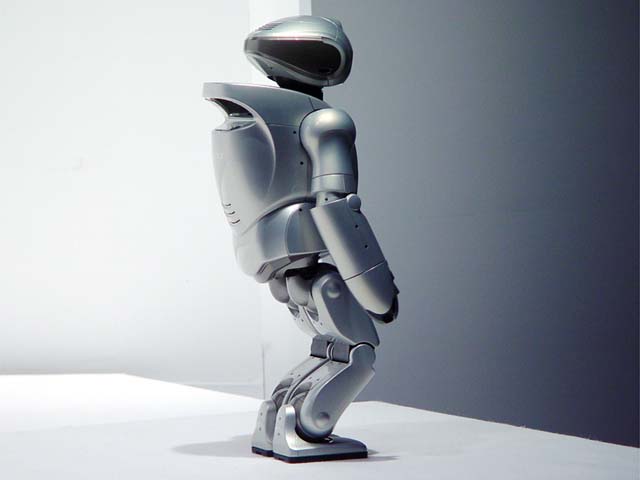
| 身長は58cmで、ごらんの通りコンパクト | 頭部のアップ。カメラを2台搭載するため立体視が可能 | 股関節部分 |
 |
 |
| 足首 | 首の付け根にはジャックのようなものが見える |
この後、会場ではSDR-4Xのデモが約1時間にわたって実施された。デモは3段階にわけて実施され、最初に行なわれたのは、実時間統合適応制御技術に関するデモ。リアルタイムで姿勢制御を行なうもので、デモの内容は前後左右に動くサーフボードの上にSDR-4Xが立ち乗りするというもの。地面の角度が次々に変化しても、バランスを崩すことなく、難なく乗りこなしていた。
引き続き、路面適応制御についてのデモが実施され、畳から襖の敷居状の模様を挟んでタイル状の床へ移動するという形式で行なわれた。地面の凹凸などを認識して歩行する、というデモで、敷居や、あらかじめ用意された小さな段差も難なく歩行していた。歩行前には、SDR-4Xが床の状態を認識するために、床を覗き込むような動作もし、ユーモラスな仕草が印象的だった。
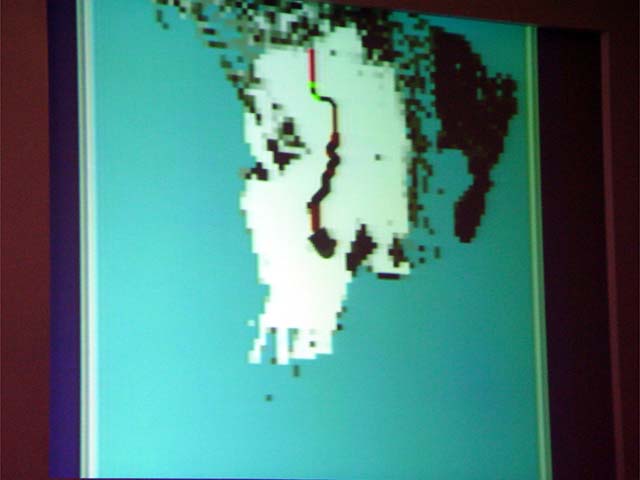
障害物を回避するデモでは、床に措かれたぬいぐるみなどを障害物として認識し、位置を測定、通行可能な経路をマッピングして歩行する様子が披露された。転倒時に自力で起き上がる「転倒運動制御」のデモも実施され、仰向けの状態から手足を使って起用に起き上がる姿が披露された。
デモの第2段階は、「マルチモーダルヒューマンインタラクション」についてのデモで、マルチモーダルとは「視覚・聴覚を総動員したコミュニケーション」という。会場ではSDR-4Xが個人を目で認識・識別し、音声による会話を行えることがデモされた。音声認識については、SDR-3Xでは20語前後しか認識できなかったのにくらべ、SDR-4Xでは5~6万語程度の言葉が認識できるようになっているという。
また、転倒させられると「痛いよう~」などと文句を言うなど、人間の挙動に対してある程度自然な反応も返ってくるになっている。
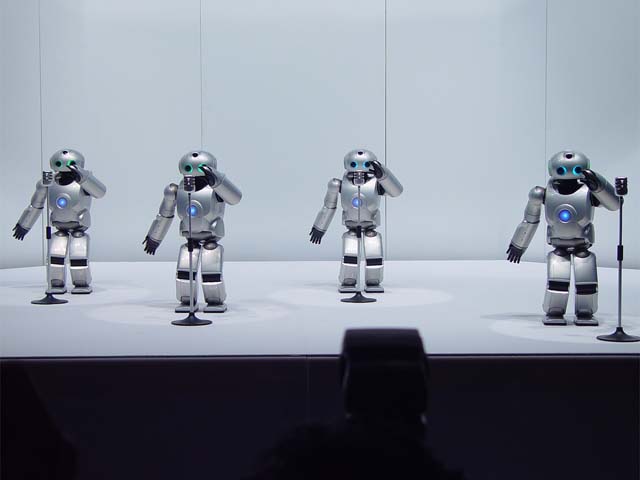
最後のデモでは、SDR-4Xのウリの1つである歌とダンスが披露された。歌についてはSDR-4X内で合成音声を作成しており、あらかじめ録音しているものを再生しているわけではない、という点が強調された。
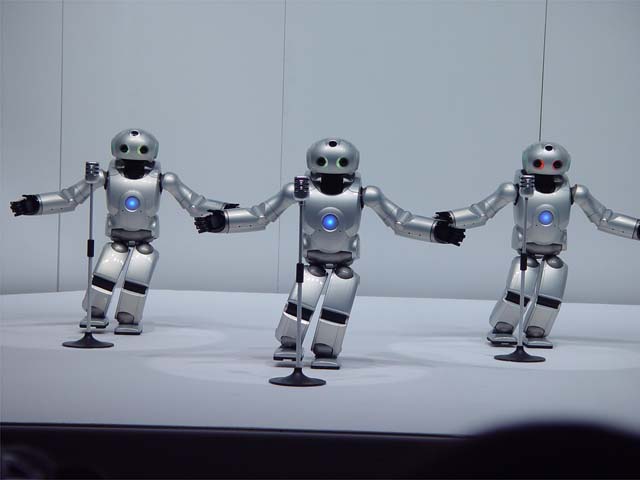
ここでは4体のSDR-4Xが登場し、独特の「声色」で、オリジナル曲「スマイル」を歌い上げた。その後、SDRシリーズとしては、おなじみとなったダンスも披露。今回はオリジナル曲「We are SDR」に合わせた軽快なダンスとなった。
発表会後の質疑応答では「デモ中での歩行を開始するタイミングや、歌を歌い始めるタイミングなどはあらかじめ入力されたデータをもとに実施しているのか? その場合、自律といえるのか?」という質問がされ、土井氏は「確かにそれぞれのタイミングはあらかじめ入力している場合もあった。実際、AIBOなどでも、完全な自律状態では行動の予測がつかず、このようなデモを行なうことは難しい。そのため、やむを得ない処置だと考えている」と述べつつ、「本当の自律ロボットというのは、ハコから出してすぐに動き始めることができるものだと思う」とも語り、そのようなロボットを開発して行きたい、という点を強調した。
 |
 |
| サーフィンをするSDR-4X。傾斜が変化しても揺るがず安定している | |
 |
 |
| 片足で立ってバランスを取っているところ | |
 |
 |
| 床をよ~く確認して…… | 前進! |
 |
 |
 |
| 手を掲げながら障害物を確認する仕草がユニーク | SDR-4X内で作られる障害物マップ | 障害物を確認しながら前進するSDR-4X |
 |
 |
 |
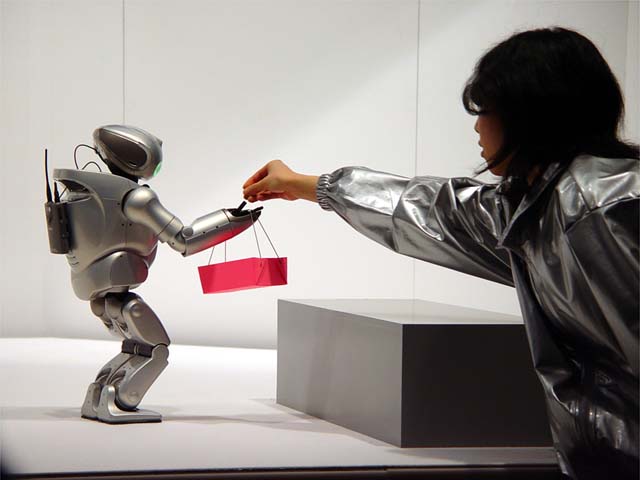
| 青いカゴを運ぶデモ。写真では赤いカゴを渡すが「これは違う」とSDR-4Xが文句をいう | 無事に青いカゴを届けることができた | デモを終え退場するSDR-4X |
 |
 |
| 転倒デモの様子。右の写真では腕を伸ばして体を起こしている | |
 |
 |
| ある程度上体が起きたら、一気に立ち上がる | |
 |
 |
 |
| オリジナル曲「スマイル」を熱唱中 | ダンスに備えて撤収中 | |
 |
 |
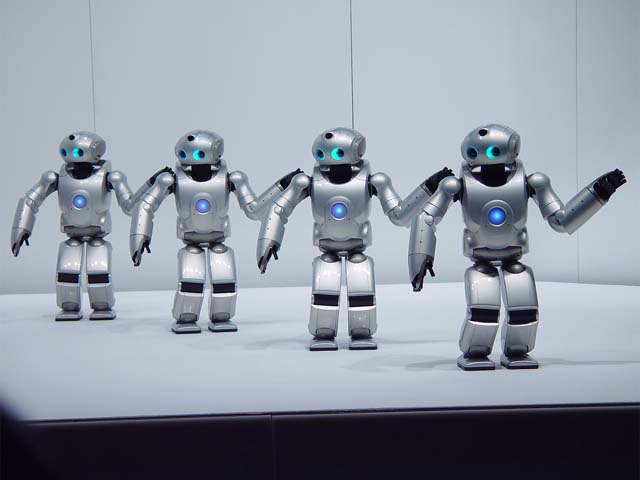 |
| 最後はやはりダンスで締め。曲名は「We are SDR」 | ||
□ソニーのホームページ
http://www.sony.co.jp/
□ニュースリリース
http://www.sony.co.jp/SonyInfo/News/Press/200203/02-0319/
□関連記事
【2000年11月21日】ソニー、身長50cmの二足歩行ロボット「SDR-3X」を発表
http://pc.watch.impress.co.jp/docs/article/20001121/sony.htm
(2002年3月19日)
[Reported by kiyomiya@impress.co.jp]
|