|
|
川田工業、Pentium III搭載の2足歩行ロボット「isamu」を公開
11月8日公開
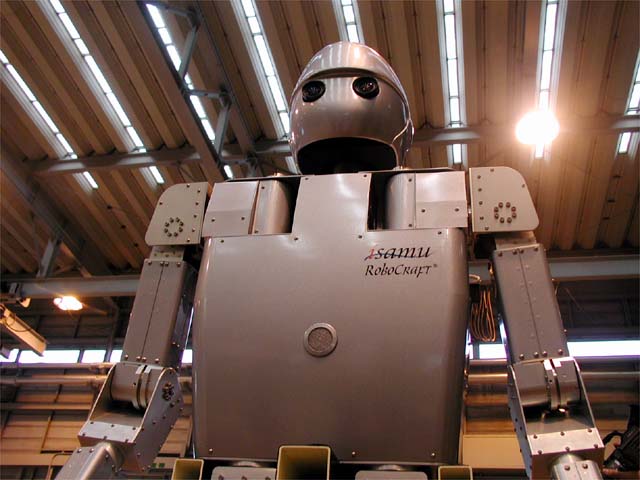
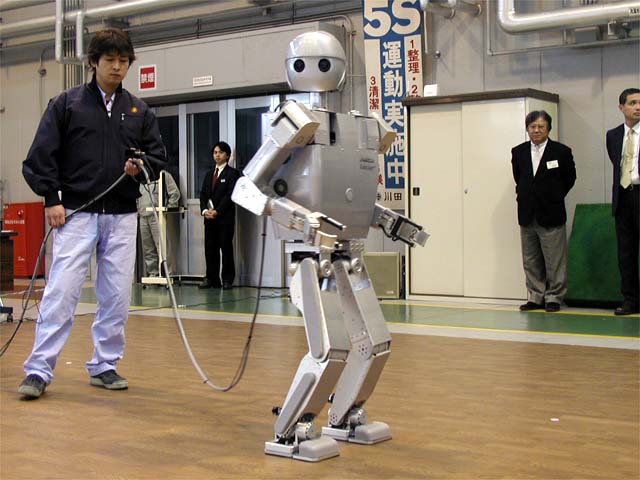
isamu(Integrated System of Advanced Motion-control Units:イサム)は、今年7月に同社のホームページ上で公開され話題をよんだ2足歩行ロボットで、今回は報道関係者向けに歩行デモなどが披露された。 同社の製品開発部門「RoboCraft」と東京大学井上・稲葉研究室が共同開発したロボット。ハードウェアの設計・構築を川田工業、歩行制御など、ソフトウェア部分については、井上・稲葉研究室が担当した。同社ではこれまで「ヒューマン・インタラクティブ・モーション・コントロール技術」と称して、さまざまなデバイスを研究・開発しており、isamuはそれらの技術の集大成としている。
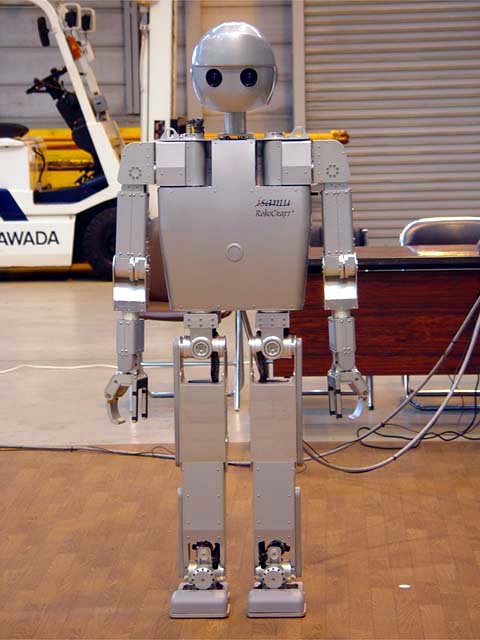
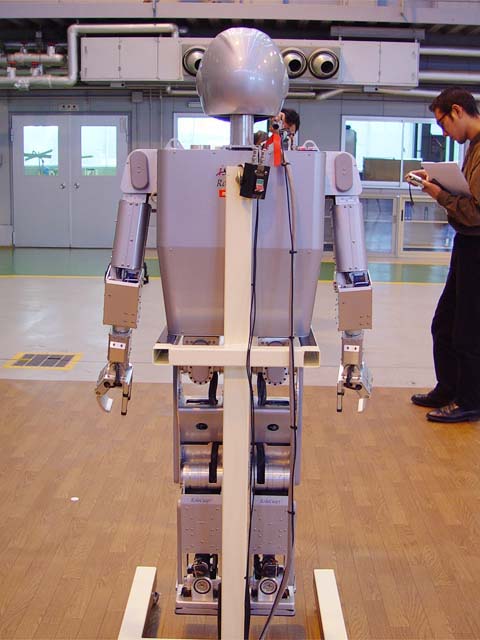
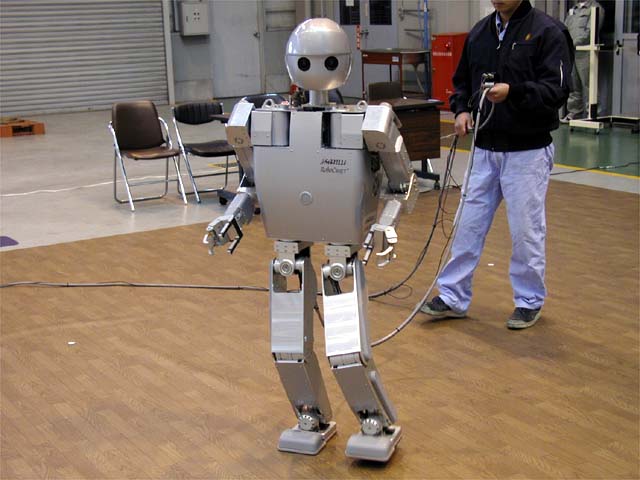
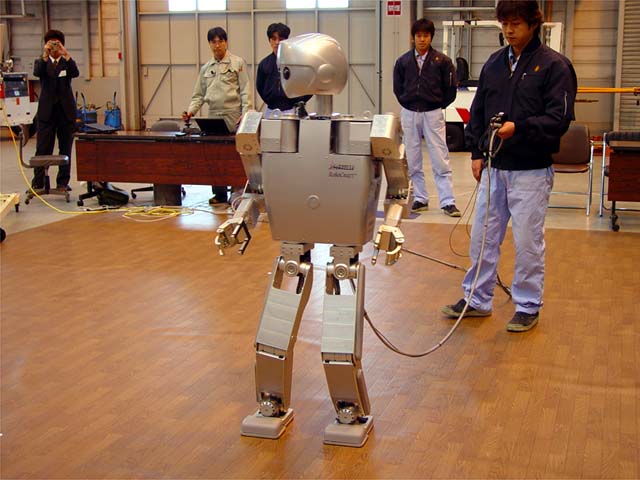
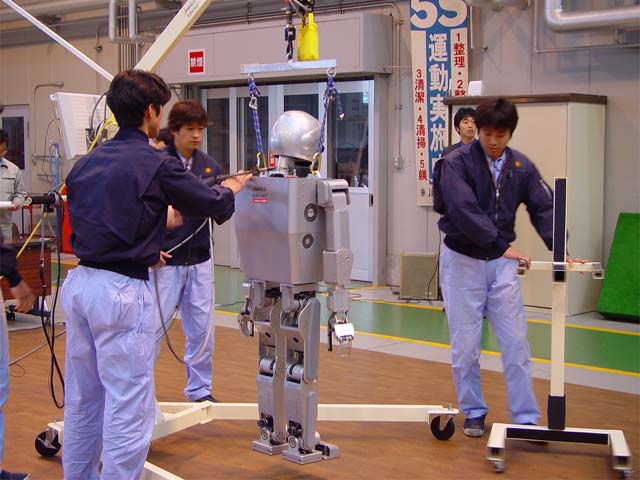
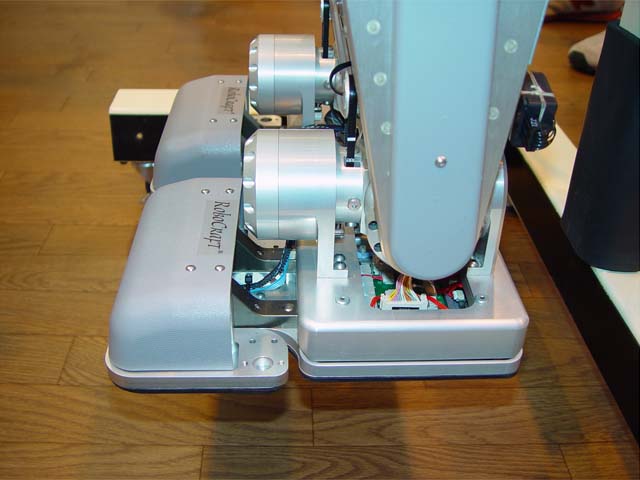
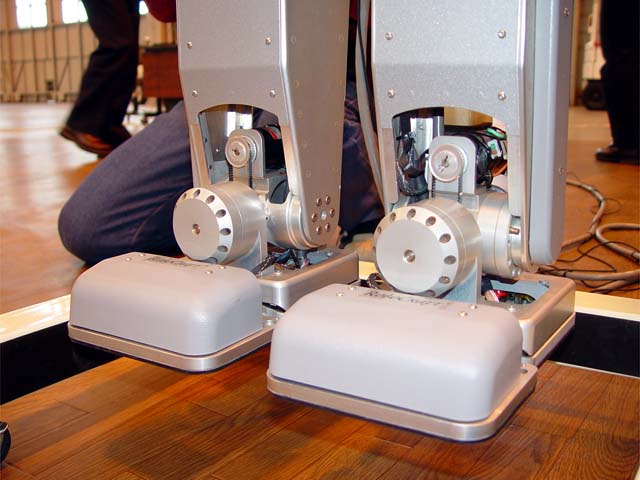
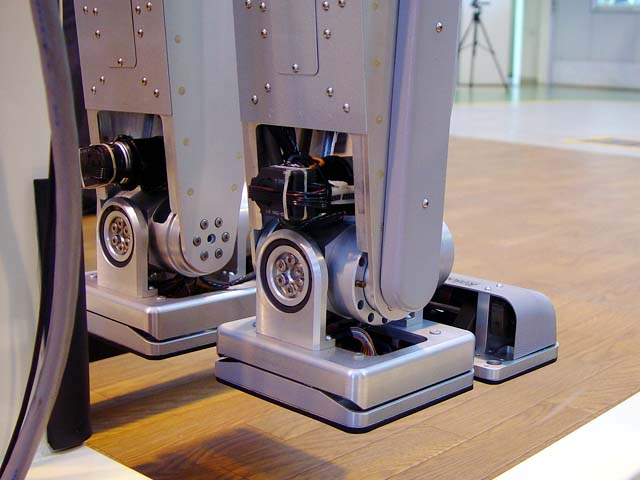
全身がアルミで覆われており、全高1,468mm、全幅604mm、奥行き32.6mmで、重量は55kg。間接自由度は、7月の発表時では32軸となっていたが、頭部カメラの旋回軸などが省略され、現在では30軸となっている。最大歩行速度は約2km/h。指先には握力センサーが内蔵されており、最大約2kgの把持力がある。 CPUはPentium III 1GHzをデュアルで搭載。OSはRT-Linuxが採用されている。本体には、IEEE 802.11bを利用した無線で移動命令などを出すことができる。 もっとも大きな特徴としては、つま先歩行があげられる。これまでの2足歩行ロボットの多くは、つま先部分が個別に可動する機構にはなっておらず、足首を水平に移動させて歩行している。isamuでは、つま先および、かかと部分を独立して制御しており、解説にあたった、同社のロボットプロジェクトリーダー 五十棲隆勝氏によれば、「つま先が独立して動くことにより、歩行速度の向上や、より高い段差への対応が可能になる」という。なお、会場で行なわれたデモではつま先歩行は行なわれず、事前の資料映像放映のみとなった。 また、本体は、同社が得意としている航空機と同様の板金構造となっており、軽量化や剛性の強化につながっている。ボディだけなら4kg、片足では10kg程度という。 電源については、鉛バッテリを本体に内蔵するほか、ケーブルにより、外部からの電源供給も行なう。稼働時間は約7分。鉛バッテリを内蔵した理由については「内蔵するサーボなどの起動時に瞬間的な大電力が必要なため」と説明している。 頭部には2台のカメラが搭載され、人物のデータなどを入力することで特定の人物を区別することができる。胴体前面中心には小形のマイクとスピーカも搭載され、外部ソースからの音声入出力が可能。 isamuはあくまで研究用のロボットであるため、販売の予定などはないが、同社の取締役事業部長 川田忠裕氏によれば、「2足歩行ロボットの研究などに使いたいという要望があれば、前向きに検討していきたい」と語った。 ○歩行デモの様子
□川田工業 航空・機械事業部のホームページ (2001年11月8日)
[Reported by kiyomiya@impress.co.jp] |
I |
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||