
|
|
世界初の2足歩行ロボット競技大会「ROBO-ONE」開催 |
 |
会期:2月2日~3日
会場:日本科学未来館
日本人男性の72%がロボットに対して「2足歩行の人型デザイン。必殺パンチでどんな敵もノックアウト」というイメージを抱いている、というのは根も葉もないウソだが、それでも「戦う人型ロボット」にあこがれを抱く人も少なくないだろう。そんなあこがれを形にした2足歩行ロボットの競技大会「ROBO-ONE」が、2月2日~3日、日本科学未来館で開催された。ロボットへの熱い思いを込めてレポートしたい。
ROBO-ONEは、日本科学未来館が主催する2足歩行ロボットによる格闘競技大会。今回が記念すべき第1回目で、主に個人の手による38台のロボットが参加した。
ROBO-ONEに参加できるロボットは、身長20~120cmまでの2足歩行型ロボット。制御方法には規定はなく、完全なラジオコントロール型とコンピュータ制御型のどちらでもOKだ。競技は、ロボットのデモンストレーションによる予選と、デモンストレーションと格闘試合の総合得点で競われる本選トーナメントの2段階で行なわれた。
■こんなロボットが登場
歩行ロボットによる格闘競技というと「かわさきロボット競技大会」が有名だ。「かわさき」は非常に厳しいレギュレーションでありながら、エアシリンダーなどで武装し、洗練された設計のロボットが多数登場する。「かわさき」の主流は6足~8足のロボットで、コンピュータ制御はほとんど使われず、設計に余裕が持てないため戦闘に特化したロボットがほとんどだ。
「かわさき」に比べると、ROBO-ONEはレギュレーションが緩く、デモンストレーション色の強いロボットが多い。また、ROBO-ONEは第1回目ということもあって「この大会のために1年前から用意していました!」という人がほとんどいなくて、参加者の多くが「趣味で2足歩行ロボット作っていたんで、それで出場します」といったノリで、格闘向けに設計されていないロボットばかりだ。
まだ「ROBO-ONEではこのデザインが有利」というスタンダードが登場していないため、ロボットの設計もバリエーションに富んでいる。今回の大会では、上位4位のロボットのタイプが異なっていたので、それらを例に挙げてロボットのタイプを紹介しよう。
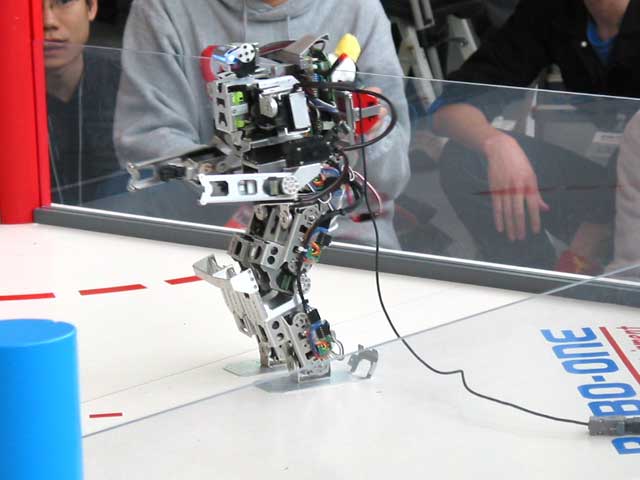 |
| 「R-BlueIII」は完成度の高さからデモンストレーションのみの予選を1位で通過している <動画1><動画2> |
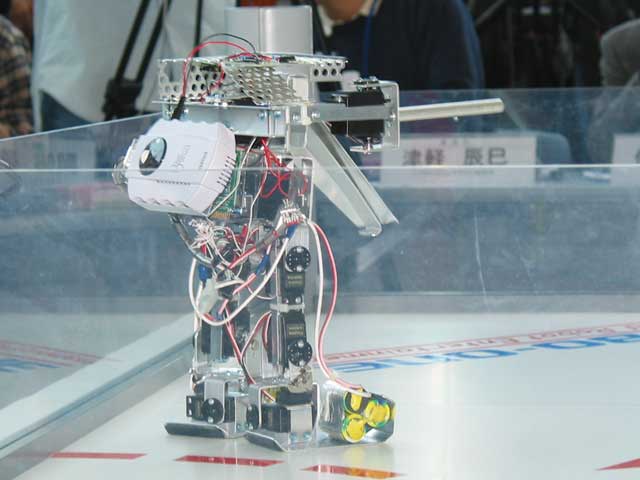
4位となった吉村浩一氏による「R-BlueIII」は人型タイプの代表だ。身長380mmで、32自由度(ロボットの世界ではモータの数を自由度と表現する)を持ち、手を振ったり正座をするなど多彩なアクションが可能だ。このタイプの場合、多数の関節を正確に制御するために、本体内にマイコンを搭載し、さらに操縦者は電波か赤外線で接続されたパソコンを操作する。
今大会では、趣味で人型ロボットを作っていて、それを参加させたという人が意外と多かった。しかし、やはり人型ロボットは難易度が高く、実際に歩けるレベルに達しているロボットは少なかった。
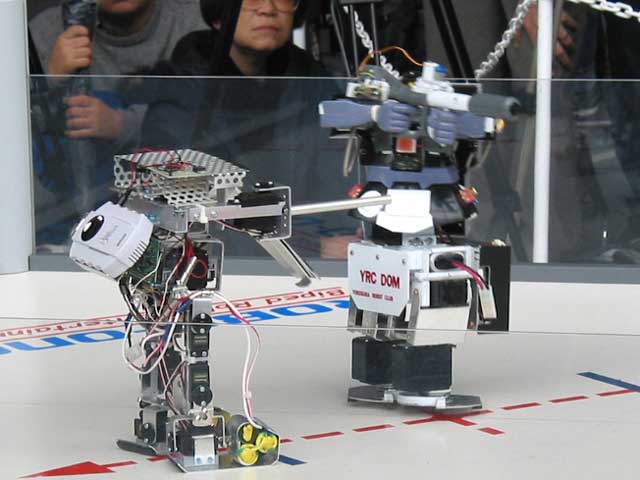
マイコン制御を併用しつつ、人間とは異なる関節構造を採用したロボットも出場している。2位入賞の片迫春夫氏による「YRCドム」は、並行リンクと水平回転軸だけで歩くという非常にユニークなロボットだ。個人的な印象としては「YRCドム」は参加ロボット中もっとも機動力が高かったと感じた。
2足歩行ロボットに必要とされる要素は「常に設置している足の直上に重心を持っていく」である。「YRCドム」は工作の完成度の高さもさることながら、重心移動と足の動作が非常に効率的に設計されており、素早く安定した歩行が可能なのだ。このようにロボットのために最適化された関節構造を持つタイプのロボットは、一般的に機動力と安定性に優れるのだが、今回のROBO-ONEへの参加はそれほど見られなかった。
 |
 |
 |
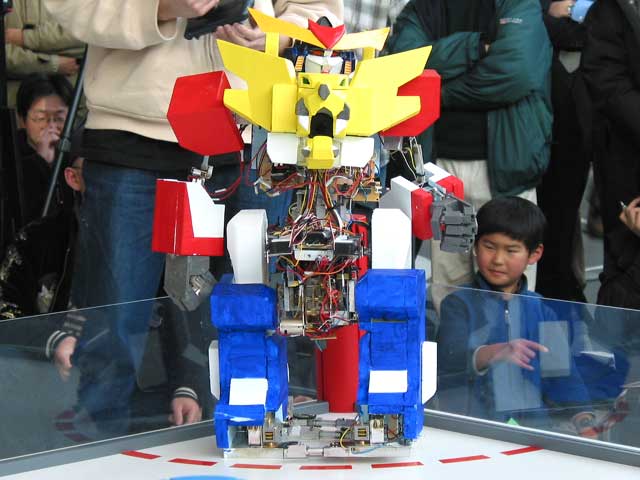
| 松本大輔氏の「RC-GUNDAM」。アニメ「ガンダム」のフォルムを崩さないよう、小型サーボを多数使用 <動画> |
森永英一郎氏のMIKE2002HU。23自由度を持ちコミカルな動きをするも、安定性は低い様子 <動画> |
YRCドムは名前の通りアニメ「ガンダム」に登場するドムをデザイン。歩き方は独特だが、重厚でドムらしい動きともいえる <動画> |
 |
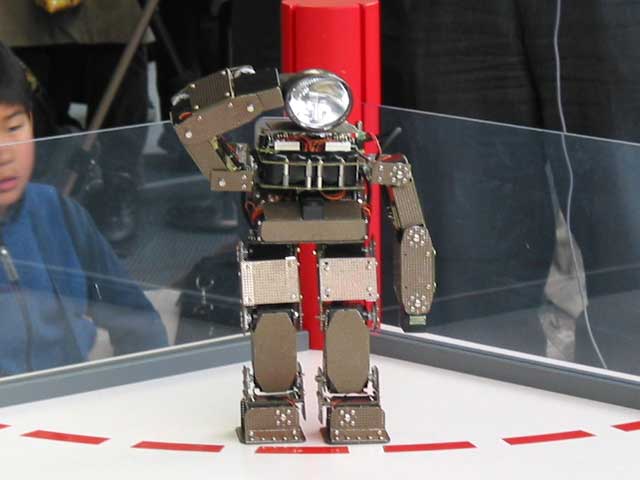
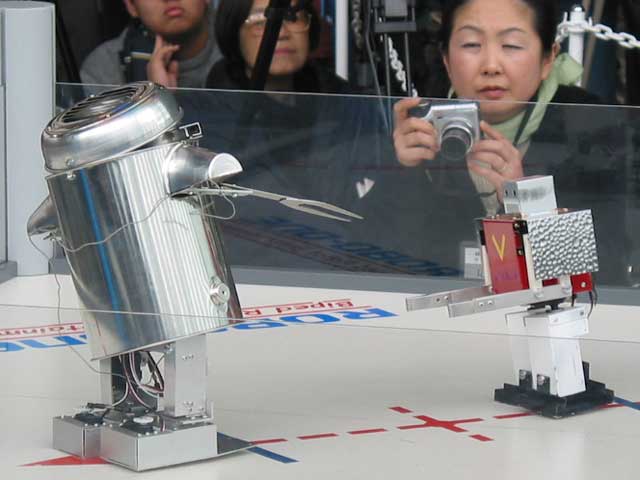
| 見た目シンプルだが完成度は高い毘夷零号機 <動画> |
完全人型に並んで多かったのが、人型ではないシンプルな関節構造のロボットを、普通のラジコン用コントローラで操作するタイプのロボットだ。足の構造を最低限の関節で済むように設計して、それらをすべて手動で操作する。操縦者の熟練度が必要とされるが、マイコンを使わずに製作できるため、多くのロボットが出場していた。
3位に入賞した佐藤豊氏の「毘夷零号機(びいぜろごうき)」は、このタイプのロボットの典型だ。「毘夷零号機」は見た目「ただのブリキロボットかよ」と突っ込みたくなるデザインだが、安定性・操作性・機動性に優れ、さらに水平横移動が可能だったため、非常に有利に戦闘を進めていた。
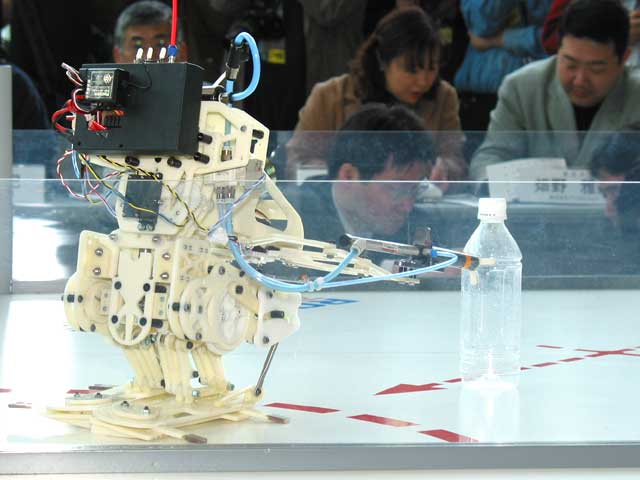
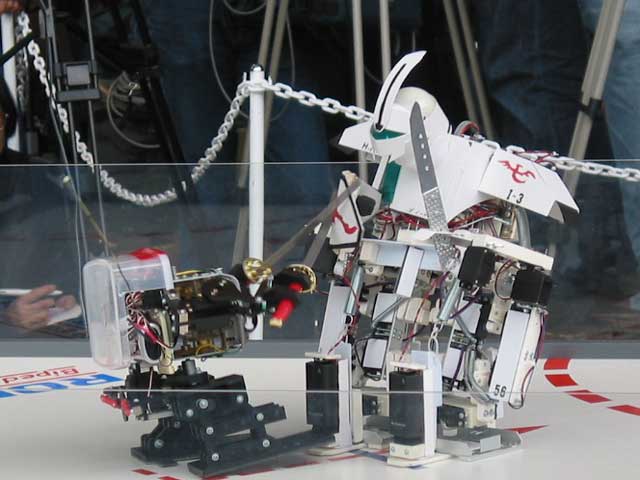
普通の2足歩行ロボットの場合、一歩足を進めるだけでも「軸足に重心を移動し」「逆の足を持ち上げ」「前に押し出す」という動作が必要なため、片足あたり2自由度以上を持たす場合が多い。しかし今回優勝した藤野裕之氏の「TA-17」の場合、片足が行なう動作をすべて1個のモータで駆動されるリンク機構で再現しているため、片足あたり1自由度で歩行が可能となっている。
このタイプは、モーターが少ないためコントロールが容易なのと、信頼性(壊れにくい)と安定性(倒れにくい)が高く、それでいてパワフルとメリットが大きい。戦闘志向の強い「かわさきロボット競技大会」ではリンク機構を使った多足ロボットがほとんどだ。特化された動きしかできないのだが、実戦という面ではもっとも優れたタイプといえる。ちなみに優勝した「TA-17」は、「かわさき」に参加した経験もある、まさに「実戦用ロボット」だったりする。
 |
 |
 |
| 柳琢也氏による「アニメイダー」。参加ロボット中最大級で、ロケットパンチも繰り出す <動画> |
滝沢一博氏の「adamanto」。歩行時の重心移動も安定している <動画> |
「TA-17」はペットボトルを倒すデモを披露 <動画> |
 |
 |
| Webなどの情報によると、右が「TA-17」で実際にROBO-ONEに出場した左は「陸戦五式」という「かわさき」向けロボットだったとか | 複雑なリンクと重心移動機構をもつ柴田善広氏の「ブロッサム」。エアシリンダーによる強力な武器を装備 <動画> |
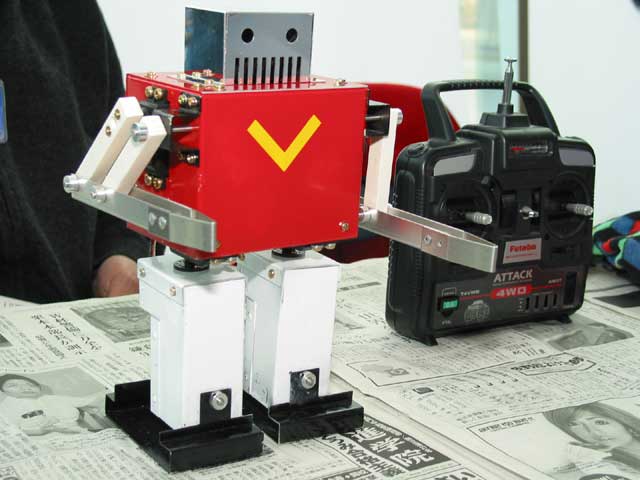
それに対して「A-Do」は、制御にMacを使い、「みなさん」と音声入力すると、猪木の物まねで「元気ですカー」と叫ぶ機能があるなど、かなりエンターテイメント志向。騒音の多い会場で苦労しつつも、大いに観客を楽しませていた。
 |
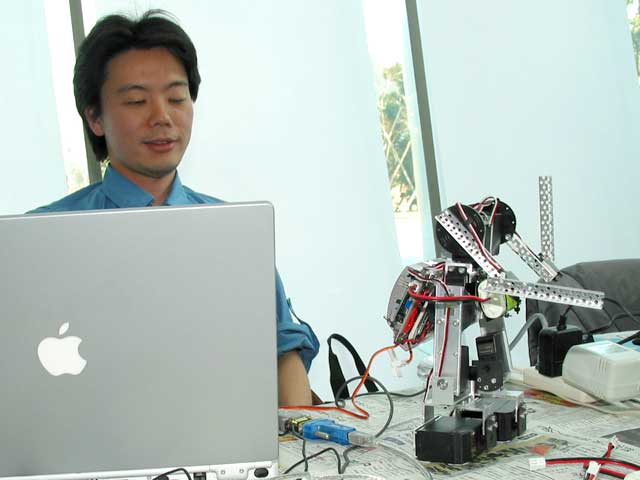 |
| 「Petapy」は片膝をつくなど自由度が高い設計 | エンターテイメント要素の強い「A-Do」。いろんな意味でトーク勝負に挑む |
格闘試合は1分×5ラウンド制で「2歩以上歩かないと攻撃が認められない」、「倒れてから10カウントで立ち上がれなかった場合、ノックアウト」というルールで行なわれる。
本選に出場したロボットの中にも、うまく歩けないロボットがあったため、近寄って攻撃する前に倒れてしまう、なんていうこともママあったが、上位入賞するロボット同士の戦闘はなかなか見所が多かった。
 |
| 「MK-2IR-2」はシンプルかつユニークな構造でヒョコヒョコ歩行する <動画> |
たとえば第2試合の「R-BlueIII」と「MK-2IR-2」の戦いでは、完成度の高い人型ロボットである「R-BlueIII」が余裕を見せて観客に手を振るパフォーマンスをすると同時に「MK-2IR-2」が倒れてしまったり、逆に「R-BlueIII」が操作ミスで吹っ飛んでしまうなど、ロボットの完成度に差があってもそれなりに楽しめる展開があった。
 |
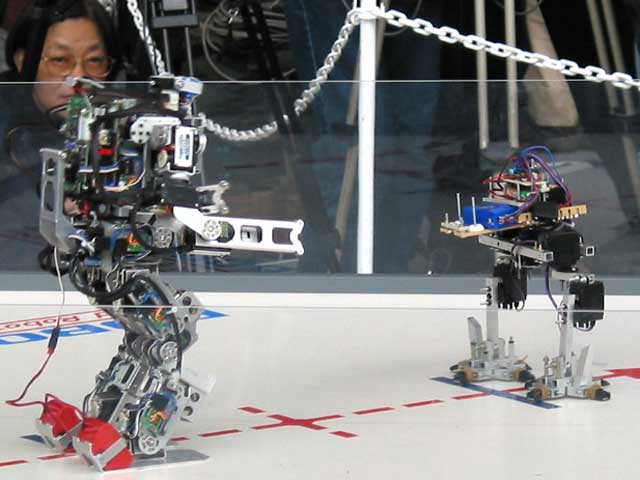
| 大型機に果敢に突っ込む「TA-17」。安定した機体同士なので、機動力に上回る「TA-17」が有利 <動画1><動画2> |
ロボットの大きさに関する制限が少ないため「TA-17」対「adamanto」のように、重量差の大きい戦いもあった。「TA-17」は果敢に「adamanto」に体当たりをかまし、武器を振るうのだが、安定性に優れた「adamanto」はなかなか倒れない。「adamanto」が片足を浮かせて不安定になった瞬間、「TA-17」が自慢の機動力を活かして突っ込み、「adamanto」を転倒させると会場は歓声に包まれた。
 |
| 見た目の技術力の差が大きい2体だが、右の「毘夷零号機」が勝利する <動画> |
ユニークな対決となったのは、3位決定戦の「R-BlueIII」と「毘夷零号機」の試合だ。
高い完成度の人型ロボット「R-BlueIII」と、見た目が「ブリキのオモチャかよ」と突っ込みたくなる「毘夷零号機」。多彩なアクションが可能な高機能ロボット「R-BlueIII」が有利か、と思われたが、素早い横移動が可能な「毘夷零号機」が機動力で相手を翻弄し、結局は「毘夷零号機」が勝利を収めた。
 |
| 実戦仕様の「TA-17」に翻弄されつつも、人型ロボットの意地をかけて戦う「R-BlueIII」 <動画1><動画2><動画3> |
名勝負といえば準決勝の「R-BlueIII」と「TA-17」の戦いだ。実戦ロボット「TA-17」に比べると「R-BlueIII」は人型なので安定性や機動力の面で劣る。そこで「R-BlueIII」は相手の攻撃に備えてしゃがむことで安定性を高める戦術を取るのだが、高い機動力と安定性を持つ「TA-17」は攻撃をよけながら体当たりをして試合を有利に進めた。そんな中「R-BlueIII」のしゃがみパンチが「TA-17」にクリーンヒットして相手を倒すと、会場が大きく沸いた。
 |
ちなみに決勝戦は、実戦仕様の「TA-17」と完成度の高い歩行機構を持つ「YRCドム」の戦いとなった。両者共にかなりのパフォーマンスを持っているのだが「YRCドム」は元々ホビーとして製作されたロボットで「ダメージポイントに赤外線を受けると停止する」という模擬戦用の機能を持っている。これが報道陣のカメラに反応して2回もギブアップせざるを得ない状態になるなど、ちょっとお寒い展開となってしまった。結局、試合を制したのはTA-17だった。
実はこの種のトラブルはロボット大会ではありがちなことで、多くのロボット大会ではセンサーに干渉しない照明を使用したり、競技中はカメラのフラッシュとオートフォーカスを規制するなど対策をとっている。今回のROBO-ONEは第1回目なので、こういった面でのサポートが間に合わなかったのだろう。
選手の面でも決勝戦は対照的だった。「TA-17」の藤野裕之氏は他のロボット大会にも参加したことのある経験者。それに対して「YRCドム」の片迫春夫氏は今回がロボット大会の初参加という、まさに初心者。こうしたレベルの違う参加者が決勝戦で競ってしまうというのも、この大会の特徴といえるだろう。
 |
 |
| 「ブリキ対決」とも呼ぶべき「バルキー」(左)と「毘夷零号機」(右)の戦い。「バルキー」のパンチは高すぎてあたらず、「毘夷零号機」のパンチは軽すぎて効かない <動画> |
「YRCドム」と「Petapy」の戦い。機動力に勝るYRCドム相手に、Patapyはしゃがんで安定性を高め、防戦に努める <動画> |
 |
| 右から馬教授、周副教授、沈博士 |
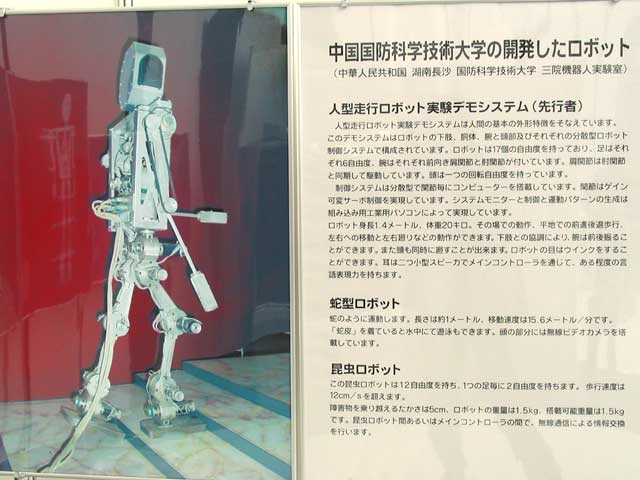
試合の合間のエキシビジョンには、中国製人型ロボット「先行者」の開発者が登場した。先行者自体はパネルとビデオによる展示のみだったが、多くの観客が開発者の話に耳を傾けていた。また急遽「先行者賞」を設け、先行者の開発者である国防科学技術大学の馬 宏緒教授のサイン入りポスターが送られることが決定すると、会場は笑いに包まれていた。
ちなみに先行者は片足6自由度、片手2自由度、頭1自由度の合計17自由度を持っている。大会に出場した人型ロボット「R-BlueIII」の32自由度に比べると少なくなっているが、片足6自由度は同じ。先行者は歩行をするには十分な性能を持っているわけだ。
 |
 |
| 先行者は歩行ロボットなどの複雑系の研究用ロボット | 各関節には100Wクラスのモータが使用されている <動画1><動画2> |
 |
| 日本科学未来館の館長 毛利衛氏 |
ROBO-ONEを主催する日本科学未来館は、ホンダの人型ロボットASIMOが就職したことでも有名だ。ただし、今回の大会には残念ながらASIMOは登場しなかった。実はレギュレーション的にはギリギリASIMOもOKなのだが、大会参加、とはいかなかったようだ。その代わりではないが、日本科学未来館の館長である宇宙飛行士の毛利衛氏が主催者として出席していた。
大会運営者側では、次回のROBO-ONEを夏ごろ開催することを予定しているという。今回の大会は第1回ということもあり、いわば様子見的な要素も強かったが、予想以上の来客に恵まれたので、今後さらに盛り上がる可能性もある。あまり格闘志向の大会ではないので、趣味でロボットを作っている人、これから作ろうとしている人にとっては、自分の技術力を試す良い機会となるだろう(そんな簡単なものでもないが)。
なお、運営者側では今後、レギュレーションを強化することを検討しているという。まだ詳細は決まっていないが、今回は「2歩以上歩かないと攻撃できない」となっていたが、今後は「屈伸できないとダメ」などに変更される可能性もあるという。
長く続いているロボットの大会というと、洗練された技術を競うタイプのものが多いが、最近ではエンターテイメント性を重視する大会も増えてきた。今後のROBO-ONEがどのような方向に進むかわからないが、今回は大会自体が洗練されていないおかげで、さまざまなレベルの参加者から多種多様なデザイン・大きさのロボットが登場し、その雑多さが逆に面白かった印象だ。第2回目以降は、洗練された技術を投入する学生団体や社会人が増えてくると思われるが、それだけでなく、ユニークなロボットも多数参加する大会になって欲しいところだ。
□ROBO-ONEのホームページ
http://www.robo-one.com/
(2002年2月4日)
[Reported by 白根雅彦]
|