 |
| 「Rosemary」 |
7月12日 発表
千葉工業大学未来ロボット技術研究センター(fuRo)は、7月12日、過酷災害対応、原発用ロボット「Rosemary(ローズマリー)」を正式発表した。現在、福島第一原発に投入されているロボット「Quince(クインス)」に引き続き、8月の中旬から下旬には実際に現場に投入される予定。「Quince」はレスキュー用として開発されたロボットを原発対応として緊急改造したものだったが、今回の「Rosemary」は、その経験をふまえて、ゼロから機構設計・機能設計を行ない、新規に開発した。fuRoでは「後継機ではない。まったくのオリジナル」だとしている。
なお「東京スカイツリー」の千葉工大サテライトキャンパスにも「Rosemary」は置かれているが、そちらはプロトタイプの標準モデルで、今回のモデルはさらに原発用に特化したものだという。特に高い位置から原発施設内を観察するための「高所カメラ」を装備したことが特徴となっている。
 |  |
| 伸縮するマストと「高所カメラ」を装備した | 高所カメラ |
●これまでのロボット「Quince」の原発での活躍
 |
| fuRo副所長の小柳栄次氏 |
「Quince」はこれまで福島第一原発で合計13回のミッションを行ない、建屋の1Fから5Fまでの調査を行なっている。福島第一原発という「ごまかしのきかない災害現場」での運用を通して、開発での問題点や、「もう少し長く動かしたい」とか「バッテリ交換時の被爆線量を減らしたい」といった現場からの要望がはっきりし、それらを反映させたという。
実際に開発した副所長・小柳栄次氏は、現在投入されている「Quince」によるこれまでの活動を振り返り、「Rosemary」との差異について解説した。Quince1号機は2011年6月20日に千葉工大から出て、同月24日に投入された。これまでに各フロアでダストサンプリングや線量計測を実施、内部に設置されたクレーンや、スプレー冷却系など重要機材の保全状態を確認するほか、燃料プールの撮影などを行なってきた。
10月20日には通信ケーブルが切断、1号機は帰還できなくなったが、その後、全自動通信ケーブル巻き取り装置とケーブル切断時の救援システムを搭載した2号機、3号機を投入し、引き続き計測や状況確認の作業を行なっている。7月4日には1号機建屋で米国iRobotのロボット「Packbot(パックボット)」と共同作業を行なった。Packbotがドアを開けて偵察を行なうというミッションだったが、ドアの鍵穴に鍵を刺すことはできたが、ドアを開けるには至らなかった。
6月13日には、2号機の5Fで燃料プールの撮影を行なっている。このミッションについて小柳氏は、前日に東京電力が、ロボットがこれこれこういうルートで上って燃料プールの写真撮影をしてくると予告をして、その通りの作業ができたと紹介。これは「予告先発して完封勝利したようなもの」と野球に例えて、Quinceの信頼性を自賛した。そこまで信頼性が高くなったロボットに対して、さらにより高性能のロボットを作ろうということで、Rosemaryの開発を行なったという。
例えば、燃料プールの撮影を行なうことはできたものの、撮影できたのは水面で燃料そのものは見えていない。真っ暗闇の中で照明を炊いても鏡面反射してしまうからだ。そこでより高いところから撮影を行なうことを狙い、パンチルトできる高所カメラを搭載することにしたという。
 |  |  |
| 福島第一原発でのQuinceの活動 | 2011年10月2日に撮影された5階燃料プール | 2011年10月20日、通信ケーブルが切れて1号機は帰還不能に |
 |  |  |
| Quince1号機、2号機、3号機の各特徴 | 2号機建屋5Fの状況 | 燃料プールの中の燃料までは見えなかった |
●QuinceからRosemaryへの改良点
QuinceとRosemaryは外形は極めて似ており、並べても区別はつきにくい。全面クローラで覆われたこの姿は、がれき上を走るかたちとしては完成された形態だと考えているという。またフリッパーアームの長さもこのくらいがちょうどいいのだそうだ。はっきりわかる違いは、表面のゴムの凹凸の形状である。Rosemaryのほうがかなり凸凹している。これは滑りやすい塗料で塗装された原発内の階段で滑落しないためだという。
 |  |
| 「Quince」(右)と「Rosemary」(左) | 外見の違いは表面ゴムの形状。手前がRosemary |
 |
| 【動画】60kgの重りを搭載した状態で階段を踏破する「Rosemary」 |
 |
| 【動画】緑色の塗料は実際に原発の階段内で塗られているもので、除染は容易だが滑りやすい |
しかし中身はすっかり別物になっている。バッテリ容量は倍になり、稼働時間も伸びた。長時間稼働できるのは作業員の被爆量低減に有利だ。充電方式もバッテリ交換ではなくプラグイン方式になり、メンテナンスフリーになった。原発建屋に電源がきたら、将来は自動充電可能にする予定だという。
本体は資材運搬も可能になり、転落しても大丈夫なようにメインフレームも改良され、ロボット本体の重量は重くなった。42度の階段を60kgのウェイトを載せた状態で移動出来る。ちなみに、60kgのウェイトを載せた状態で、さらに体重90kgある記者を載せても動くことができた。現在fuRoでは作業ができるロボットアームも開発中。原発内で作業する為には重たい鉛毛カーテンなどを扱わなければならないため、重さ3kgの物体をアームを伸張した状態で把持できるスペックが必要だという。
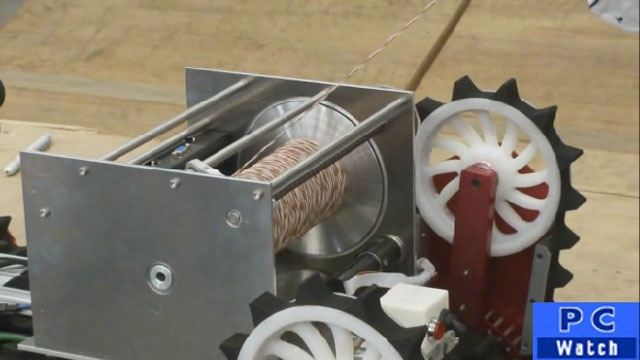
通信ケーブルは振動によってゆるみにくい縦巻きから横巻きに変更された。これにより巻き取り量も500mまで増加し、将来的にはより太いケーブルを使うことで、より高精細な情報を送ることも可能になるという。有線のケーブルが切断したときのための無線での救援機能も引き続き搭載されている。
 |  |  |
| 「Quince」と新ロボット「Rosemary」の比較 | 増加した重量の内訳 | 改良された通信ケーブル巻き取り装置 |
 |  |  |
| プラグイン充電によって作業員がロボットに接触する時間を短縮 | 側面に搭載されたバッテリ | 重量60kg+体重80kgくらいの小柳氏が乗っても移動可能。 |
今回一番の外見的特徴であるマスト上に付けられた「高所カメラ」は、平常時1.2mから3.1mまで伸ばすことができる。重要な緊急用のシステムは天井の高いところにあるが、それらを直接確認するためのカメラである。前方と後方のパン・チルト・ズーム可能なカメラのほか、天井にぶつけないための天井カメラ、そして熱を撮影できるサーモカメラを搭載している。放射性物質が配管の中を逆流している可能性があるため、それを調べるためのカメラだという。支柱は±40度傾けることが可能で、階段昇降のときにはバランスを取る。
 |  |  |
| 高所カメラを装備した支柱は3.1mまで伸びる | 高所カメラ。左側が前。前後に広角のPTZカメラ、その上にサーモカメラ(四角い箱状のもの)と天井カメラ | 通信ケーブル巻き取り装置 |
 |
| 【動画】通信ケーブルを均等に巻くことができる |
なお、ロボット本体は防塵防水だが、上部に搭載している機器類はそうではないので、水中での活動はできない。今後2週間程度、千葉工大で改良作業を続け、東京電力での試験が2週間くらい行なわれたあと、8月の中旬から下旬には投入される予定だ。将来的には、免震重要棟から東電作業員が操作できるようになる。そのため、作業員の被曝量の大幅な低減が可能だという。
これらのロボットは千葉工大から東京電力に無償貸与される。原発内でのロボット作業そのものは小柳氏らが行なうわけではないが、作業時には1週間前と前日それぞれに小柳氏らのところに電話で事前の連絡があり、作業中は小柳氏らも待機しているという。
(2012年 7月 13日)
[Reported by森山 和道]