■森山和道の「ヒトと機械の境界面」■
千葉工業大学 未来ロボット技術研究センター(fuRo)は、全長1.9m、重量230kgの大型2足歩行ロボット「core(コア)」を発表した。「core」は鳥脚型のロボットで、2009年度に開始した「fuRo搭乗型2足歩行ロボットプロジェクト」で開発された大型ロボットのプロトタイプ1号機。電磁ブレーキを組み込んだ関節駆動用大型モーターシステムと、足部の衝撃吸収機構を新たに開発して実現した。可搬重量は100kg程度で、世界最大級だとしている。
全長1,915mm、重量230kgの大型2足歩行ロボット「core」の自由度は、片足6関節×2の12。脚長は1337.5mm。センサー類は3軸の角速度センサーと加速度センサーを12個、足裏タッチセンサー×8、6軸力センサー×2のほか、モーター部とモーター駆動回路部に各種センサーを搭載している。電源は外部供給だが、バッテリの搭載も可能なスペックを持っている。
OSはRedHawk Linux。体内LANにはCANを使っている。動力学シミュレーターにはODEを用いた。
デモでは前進動作のほか、およそ100kgの重りを載せた状態での屈伸が披露された。なおデモはそれぞれ2回行なわれたが、後退や、ウェイトをつけた状態での歩行などは行なわれなかった。
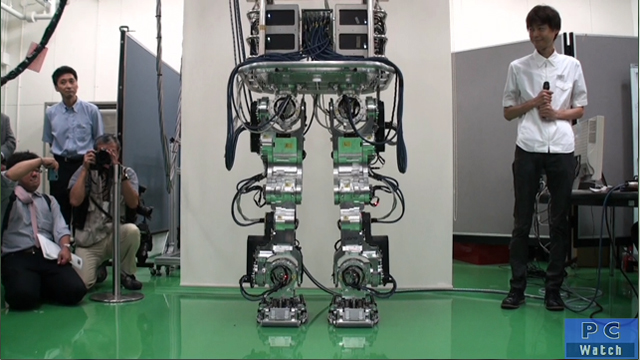 |
| 【動画】3歩前進の様子。解説はfuRo所長の古田貴之氏。その後、fuRoの研究員がウェイトをロボットにつけていく。 |
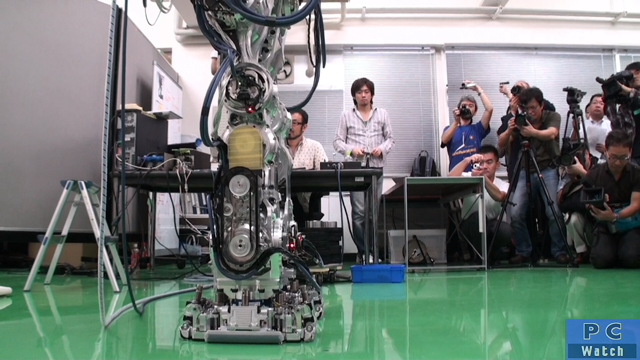 |
| 【動画】歩行動作を横から。着地の瞬間、足先が衝撃吸収している様子がよく分かる |
 |
| 【動画】屈伸。静止時にはモーターのトルクではなくブレーキを使うことで、省エネを実現している |
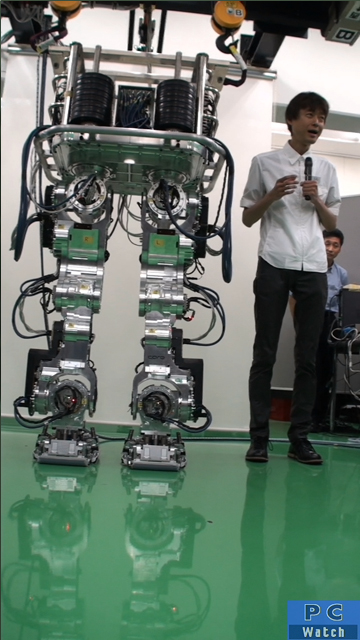 |
| 【動画】屈伸するロボットの横でモーターのパワーについて解説する古田氏 |
「fuRo 搭乗型2足歩行ロボットプロジェクト」とは、脚移動式モビリティを未来の乗り物として開発することを目的としたプロジェクト。特にシニアカーの用途にロボット的な自動操縦、不整地移動能力を備えることを目指しているという。福祉用途で人の移動や日常生活を支えるためには、省エネルギーかつハイパワーな駆動システム、制御システムが必要となる。「fuRo搭乗型2足歩行ロボットプロジェクト」を通してcoreに搭載する部品開発を通して、それらの技術開発を目指す。つまり「core」は、技術ランドマークだという。
今回のプロトタイプのための要素部品も新規にfuRoで開発されたものだ。特に関節駆動用の大型モータシステムが特徴で、定格で1,200W、最大で3,000Wと大出力のブラシレスモーター(電動スクーターなどのモーターの出力は600W以下)と減速機、電磁ブレーキ、絶対角度センサーから構成される関節駆動用のユニットと、モーター制御駆動ユニットから構成されたもの。特にモーターはハイパワーなだけではなく、今回、歩行ロボットの目標スペックや歩行パターンから必要な回転数やトルクなどを計算して作り出したことから、市販のモーターに比べると、ロボット用途には最適なスペックとなっているという。ユーザー視点で開発されたモーターというわけだ。
また足首には衝撃吸収機構をつけた。歩行ロボットの制御は床とロボットの足との繰り返される衝突やそれに伴う振動の制御が要となるが、足平の部分に並列可動型吸収器1台と周辺部分に独立可動型吸収器4台をつけたことで、脚着地の際の衝撃力の8割を吸収し、振動をおさえこむことができ、ロボットを安定して制御できるようになった。
 |  |  |
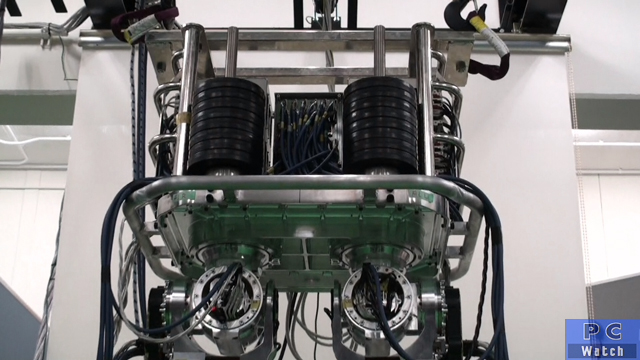
| coreを解説するfuRo室長の先川原正浩氏(左)と所長の古田貴之氏(右) | 脚部 | 背面から |
 |  |  |
| 側面 | 足平部分の衝撃吸収機構。中央に見える青い部品は力センサー | クレーンに吊るされた状態のcore。fuRoの所員は全員クレーンを動かすための免許を所有している |
ランドマークプロジェクトとしての「core」を通して開発される各種ロボット部品の実用化と事業化も進める予定だ。各部品は、fuRoの開発した部品を売るための会社組織であるフューロワークス株式会社で事業化される予定だ(古田所長が社長を兼務している)。マイコンによるモーター制御を学ぶ教材なども開発しているという。
 |  |  |
| 新規に開発された磁気式絶対角度センサー | fuRoモータードライバー | |
 |  |  |
| モーターとドライバーの仕様 | 拡張モジュール方式32bitマイコンロボティクス教育キット | フューロワークス株式会社での事業化を目指す |
またもう1つの特徴は、千葉工業大学の各学部・学科の学生参加型の人材育成プロジェクトでもあること。モノづくりの過程や作り方の分かち合いが行なわれており、また、「core」のロゴも学生がデザインしたものだという。記者会見場内にも、デザイン系の学生たちがデザインした未来の2足歩行モビリティの活用シーンイメージスケッチと、光造形による立体模型が飾られていた。また、あわせて開発の様子などもパネルにされていた。
 |  |  |
| coreのロゴ | 同じく学生がデザインした二足歩行モビリティの例 | |
 |  |  |
| 開発の過程のパネル。このデザインも学生たちによるもの | ||
今回のロボットはプロトタイプであり、オーバースペックな部分もある。今後は、プロトタイプを通してスペックの見直しと再検討を行ない、2012年度までに新規のロボットを発表することを目指す。
 |  |  |
| fuRoのプロジェクトと今後の計画 | 今後開発予定の搭乗型2足歩行ロボットのイメージ | 将来のモビリティのイメージ |
●産総研+川田工業の「HRP-4」と、千葉工大「core」
重量級の「core」は、ちょうど前日に発表された産総研+川田工業による軽量ヒューマノイド「HRP-4」と比べると対照的でもあり、面白い。とにかく人を乗せられるロボットを作るために、モーターのような要素部品まで全て手作りして組み上げられた「core」は、良くも悪くも大学のロボットである。コストは明らかにされなかったがかなりの開発費がかかっているだろう。対して、研究室向けとはいえ商品である「HRP-4」はモーターもいわゆる「ありもの」を使い部品を共通化するなど、できる限りコストを下げることを目指して開発されている。
「HRP-4」の会見において、ロボットの製作と販売を行なう川田工業株式会社 執行役員機械システム事業部長の五十棲隆勝氏は2002年から販売したプラットフォーム・ヒューマノイド「HRP-2」のこれまでと新プラットフォームである「HRP-4」のこれからを展望して、「最近のロボット研究は当初想定したようなモビリティの方向ではなく、対人インタラクションの方向に向かっている」と語った。
モビリティとは移動技術。対人インタラクションとは、ロボットが人に対して何かリアクションする、サービスを提供するということである。対人サービスをするロボットは必然的に人間に近づく。そのためには人間が恐怖心を抱かないようなロボットであることが望ましい。HRP-4が人間よりも軽い39kgで80Wの出力しか持たないモーターを用いたのは、そういう理由による。いわばロボットが提供するサービスは物理的なものではなく、ユーザーエクスペリエンスや情報のようなものとして捉える方向だと言えるかもしれない。
対して千葉工大「core」のモーターは最大3kWである。パワーを出すことで物理的なサービスを人に提供する事を目指している。開発しているのも「モビリティ」であり、ある意味、従来型のロボット開発である。
なお、人を乗せた状態で歩行するロボットは、トヨタが2005年に「i-foot」として愛知万博で2005年にデモを広く一般の人たちの前で行なっている。実際に見た人も多いだろう。「i-foot」も同じく鳥脚型だった。coreの開発は今の段階ではそれをなぞっているように見えるが、大学の研究室、多くの学生たちによってもそれができることを示せる点は教育的には大きな価値があるのだろう。
「HRP-4」は、1998年から5年間実施された経済産業省「人間協調・共存型ロボットシステムの研究開発」(HRP:Humanoid Robotics Project)の延長線上にあるロボットである。初期のHRPでは、バックホウを人型ロボットが操縦したりしていたのだが、実用(HRP-4の場合は大学研究室に研究用プラットフォームとして販売するのが用途である)に近づくにつれ、デモンストレーションや見た目は地味になる。
今回の「HRP-4」はスラッと細いボデイながら、思わず目を見張るほどの安定した素晴らしい動きを見せた。だがなぜか今回の記者発表会では記者の数も減ってしまっていた。対してfuRo「core」は所長の古田貴之氏の知名度もあってか、やることは屈伸と前進だけにも関わらず、多くの記者たちが訪れ、会見場は(研究室そのままのスペースだったこともあるが)すし詰め状態だった。
実用が期待されつつも、楽しむネタとして人寄せパンダ的に扱われることも多い「ロボット」。2つの記者会見を見てそんなプロダクトが抱えるおかしなジレンマを感じてしまったのは筆者の考え過ぎだろうか。
 |  |
| fuRoの会見場 | 産総研の会見場 |