■森山和道の「ヒトと機械の境界面」■
川田工業株式会社と独立行政法人産業技術総合研究所(産総研)は9月15日、等身大ヒューマノイドロボット「HRP-4」を発表した。2011年1月から研究者向けに販売する。価格は2,600万円。仕様を最適化し、各部品を共通化・簡素化して価格を抑えた。
「HRP-4」は2009年3月に発表した女性型ロボット「HRP-4C」の開発を通じて得た技術を活用、身長151cm、バッテリ込みで体重39kgと軽量スリムボディーを実現した。コンセプトは「スリム・アスリート」で、研究者にとって実用的な軸配置、拡張性をもたせた。自由度は全部で34。内訳は、首×2、腕7×2、ハンド2×2、ウエスト2、足6×2となっている。片腕の可搬重量は0.5kgである。動作制御用のミドルウェアには、産総研が中心になって開発している「OpenRTM-aist」を採用した。国内外の研究室で開発されているソフトウェア資産を利用できる。
発表当日は、新しくなった歩行動作や冗長自由度を活かした腕回しや背中への腕回し、全身協調制御による体操動作、音声認識と画像認識による動作などがデモンストレーションされた。
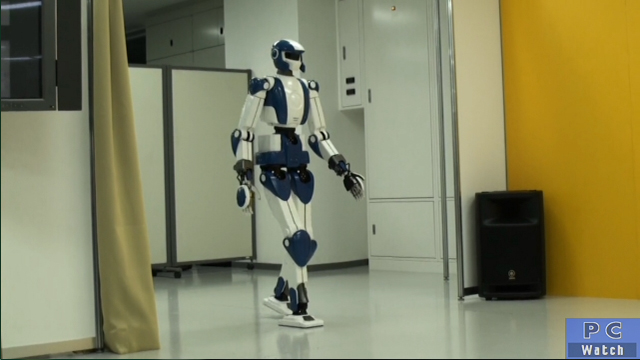 |
| 【動画】しっかり安定した足取りで登場するHRP-4。体操動作、腕回し、音声認識処理に合わせた動作デモまで |
 |
| 【動画】顔認識のデモンストレーション。 |
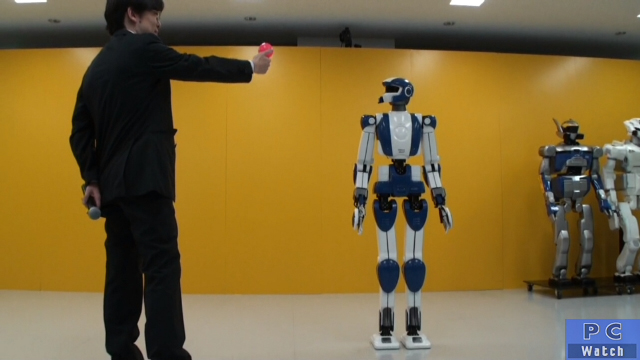 |
| 【動画】ピンクのボールを使った画像認識のデモ。頭部の外装部もカメラに合わせて動く |
 |
| 【動画】2回目のデモで行なわれた、隘路歩行時の足運び |
 |  |  |
| バストショット | 片足バランス | 「決めポーズ」と呼ばれていたポーズ |
●ハードウェア
 |
| 人間よりも軽いほっそりしたボディ |
「HRP-4」のスペックは、身長151cm、幅44cm、奥行き27cm。重量39kg。モーター出力は対人安全性を考慮して80W以下のものを採用した。動作制御用のメインボードはPCI/104で、CPUはIntelのPentium M(1.6GHz)。外部との通信はEthernet(10/100base-TX、1ポート)とIEEE 802.11a/b/g無線LANで行なう。背中に拡張PC搭載スペースを備え、画像処理・音声認識用のモバイルPCなどを搭載することができる。
体内LANにはCANを採用。モータードライバは分散配置されており、用途に応じて新たに軸を追加するのも容易になっている。バッテリは腰部分にニッケル水素を2つ搭載。交換も容易な設計になっている。センサー類はUSBカメラ×1、姿勢センサー1、足首に6軸力センサーを標準搭載している。そのほかスピーカも2系統搭載している。基本的に各研究室で使うことを想定し、拡張性を重視した設計となっているという。
骨格はアルミニウム合金。腕部や脚部など左右同じでも不都合がない部品は共通化し、腰部や脚部付け根の関節軸部品には同じモジュールを採用するなどしてコストを抑えた。人と協調するうえではデザインも重要とし、外観はロボットデザイナーの園山隆輔氏がデザインしている。カバーの材質はABSである。
 |  |  |
| 拡張性を重視した構成 | 冗長自由度を持たせた腕部の構成 | コンセプトは「スリム・アスリート」 |
●ソフトウェア
 |
| 産総研知能システム研究部門ヒューマノイド研究グループの金広文男氏と並んで立つHRP-4 |
ソフトウェアは「HRP-2」に対して一新された。ユーザーからの要望を受けて、OSには、決められた処理を決められた時間内に行なうことのできる「ハードリアルタイム実行」を可能にするための修正プログラムである「RT-Preemptパッチ」を適用したLinuxを採用。これにより、1msec周期で動作するプログラムを10μsec程度の周期誤差で実行可能になるという。また、これによりマルチプロセッサの処理能力を十分に活用することが可能になり、国際標準規格「POSIX」に準拠してリアルタイム実行されるプログラムを作成できるようになった。
ミドルウェア(ソフトウェアプラットフォーム)には「OpenRTM-aist」を採用。「OpenRTM-aist」はセンサー、アクチュエータ、アルゴリズムなどの要素機能を「RTコンポーネント」という規格でモジュール化したもので、「RTコンポーネント」の集合としてロボット・システムを構築できるソフトウェアである。産総研が中心となって標準化をすすめており、この標準規格に合わせて作られたソフトウェアならば、どの研究室で作られたソフトウェアでも使用できるようになる。
具体的には、NEDOの次世代ロボット知能化技術開発プロジェクトで開発中の開発支援環境「OpenRTP(OpenRTPlatform)」などが利用でき、デバッガやコードジェネレータなどの開発支援ツールを使うことができる。もちろん音声認識・音声合成・対話制御のほか、RTコンポーネント化されたOpenCV(画像処理ライブラリ)など既に各研究室で開発されたRTコンポーネントも活用できる。
 |  |
| コンポーネントでロボットシステムを構成する「OpenRTM-aist」 | 「HRP-2」用のシステムとの比較 |
ヒューマノイドの研究用プラットフォームの発表は、2002年の「HRP-2」以来、7年ぶりとなる。ハードウェアは大幅に軽量化し、扱いやすくなり、OSやミドルウェアも改良されて国際標準に準拠したものになり、さまざまな機能の拡張も従来より容易になった。開発環境として「OpenRTP」も使えるようになった。ソフトウェア資産の相互利用が可能だ。産総研では、ハードウェアとソフトウェアの開発を分離できることで、アプリケーションの研究開発が進むことを望むという。
「HRP-4」は9月22日から24日の日程で、名古屋工業大学で開催される「第28回 日本ロボット学会学術講演会」にて一般公開・展示される。
 |  |  |
| バストショットあおりで | 両腕を広げて大きな可動域とバランスをアピール | 側面 |
 |  |  |
| 5指を備えたハンドも川田工業製 | 腰部と脚部付け根アクチュエータは同じモジュールを使用 | 腰の両脇白い部分がバッテリー |
 |  |  |
| PCが搭載された背面 | 認識用PCなどを搭載した例 | 大きな開口部 |
 |  |  |
| 膝裏部分 | 足首部分 | 足平部分。足平はHRP-4Cより大きくなった |
 |  |  |
| HRP-4C(右)との比較 | 左からHRP-2、HRP-3、HRP-4 | 奥からHRP-2、HRP-3、HRP-4 |