
| [an error occurred while processing the directive] |
|
産総研、「働く人間型ロボット」の最終成果を発表
|
||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
| HRP-2 Promet(左)とHRP-1 |
2月26日公開
独立法人 産業技術総合研究所は26日、経済産業省が'98年より5カ年計画で実施している「人間協調・共存ロボットシステムの研究開発(HRP:Humanoid Robotics Project)」の最終成果を発表し、報道陣に公開した。
今回の発表は5カ年計画の総決算といえ、HRP-1/S、HRP-2/Pなどを駆使した「対人サービス動作」、「留守宅管理作業」、「人間との共同作業」、「建設機械の代行運転」、「プラントの保守・点検作業」といった、すべての研究成果が公開された。
HRPはこれら5つの分野で、人型ロボットが人間との共同作業や、代理作業ができるのか、その可能性を探るものであり、これらの成果を基礎として、将来のロボット産業発展の基盤とするのが狙いとなっていた。
会場では、昨年4月に中間成果として発表されたものや、同じく昨年の12月に公開されたHRP-1Sによる代行運転などが中心だが、今回初めて公開されるものもいくつか見られた。
特に、「転倒制御」デモは、人間に文字通り「突き飛ばされる」かたちでHRP-2Pが「転倒」するもので、今回が初公開となる。
また、昨年は着座の直前状態から実施された、市販のショベルカー(バックホウ)の代行運転についても、ロボットが自力で操縦席まで登り、着座する様子が初公開されたほか、雨天時での作業も公開された。このほかにも、中間成果として発表された時点にくらべて、全体的にデモの精度が向上している。
 |
| HRP プロジェクトリーダーの井上博允教授 |
今回のプロジェクトでは、デモが公開された5つの分野で人型ロボットが作業ができることを実証したが、プロジェクトリーダーの井上博允教授によると、「これらの作業そのものが成果ではなく、これらに適用可能な(ハードウェア、ソフトウェアを含めた)プラットフォームを開発し、その可能性を探ったことが成果」ということで、その過程で開発された、HRP-2と、そのシミュレータおよび制御用ソフトウェアである「OpenHRP」こそが、同プロジェクトの最も大きな成果であるとした。これらの技術はオープンアーキテクチャとしてすべての技術が公開される予定になっている。
なお、HRPは2003年3月をもって完了となるが、HRP-2については、2002年より新エネルギー・産業技術統合開発機構(NEDO)が実施している「実環境で働く人間型ロボット基盤技術の研究開発」において、さらなる機能向上が施されていく予定。また、HRP-2にさらなる改良を加えたHRP-3の開発も計画されており、2003年度から実行される見込みという。
 |
 |
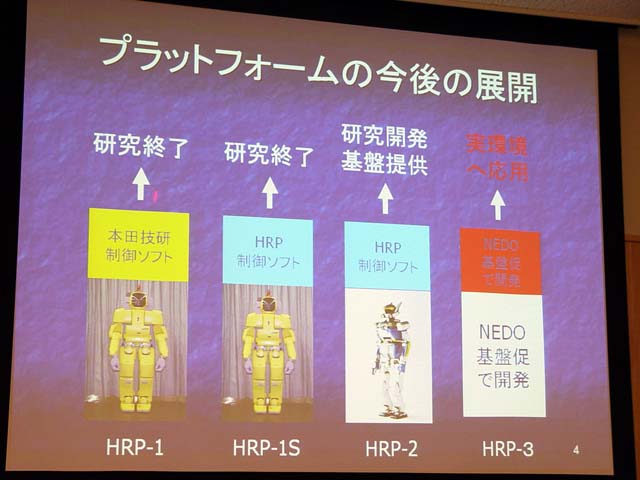 |
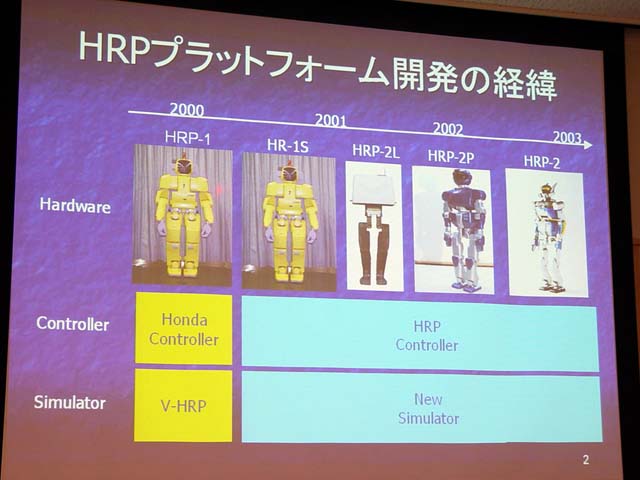
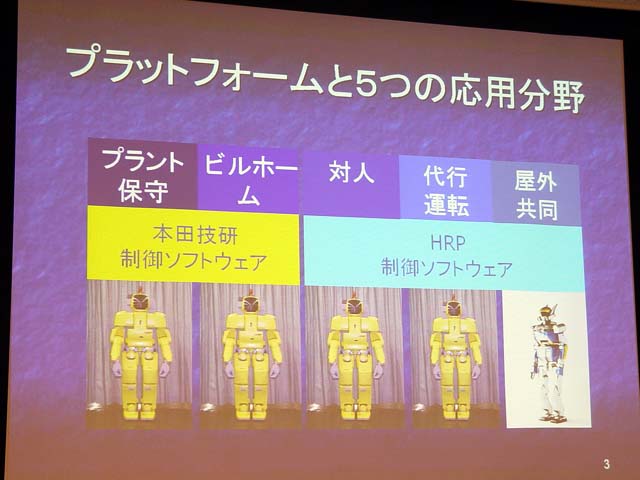
| HRPプラットフォーム開発の経緯。ホンダのP3をベースとするHRP-1にHRPの制御ソフトなどを搭載したのがHRP-1S | 各分野で利用されたロボットの種類 | 各ロボットの今後。HRP-3の開発計画もある |
質疑応答で、この5年間の成果について質問されると井上教授は、「5年前は人間型ロボットに対して懐疑的な見られ方をされていたが、現在では普通に受け入れられている。5年間で開発した基礎技術の成果は、今後、業界各社にもそのノウハウが広まっていくだろう」と、HRPによって人型ロボットの認知度が向上しただけでなく、今後のロボット産業に与える影響も大きいことをアピールした。
また、技術面については、「歩行技術についてはホンダを超えるものとしたかった。技術はすでにあるものの上に立つのが基本であり、当初の見込みを上回る成果があったと考えている」などと述べ、不整地歩行や転倒制御などが予想以上に成果を上げたことを強調した。
今後については、「歩く技術だけでなく、手や足の動きを連動させたり、上半身の能力を向上させ、全身の協調動作を強化していきたい。また、転倒時や、人間との共同生活に対応するには柔らかい外装を装備するなど、工夫が必要」とし、さらなる研究開発の必要性を説いた。
●人間と人間型ロボットの共同作業デモ
人間とロボットの共同作業を実現したもので、株式会社安川電機、川田工業株式会社、清水建設株式会社の3社が中心となって開発を行なった。
すでに昨年12月のHRP-2公開時にも、パネルの共同搬送作業などが公開されたが、今回はそれに加えて不整地歩行や転倒制御なども公開された。
不整地歩行では、足裏に搭載する力センサーと胴体の姿勢センサーの情報から、足下の段差や傾斜を検出し、足裏が路面になじむように制御するもの。デモでは、斜度5%、最大高さ1cmのパッドの上を歩行し、通常の歩行とは異なる、ゆっくりと地面を踏みしめるように歩行する様子を見ることができた。
転倒制御はロボットの転倒時に、破損を極力抑えるための姿勢制御技術。HRP-2Pでは臀部に装着した衝撃吸収用のマットを下にして転倒するように制御されている。デモでは、実際に人間がHRP-2Pを突き飛ばすと、尻餅をつくように転倒し、自力で起きあがる様子が公開された。当然のことながら、実験段階では柔らかいマットの上で実施していたが、今回のデモは、普通の堅い床上で行なわれた。
転倒制御の実験については、「当初は上手くできるものか不安はあった。限られた予算のなかでのプロジェクトであり、機材の破損は避けたかったため、非常に気をつかった」(井上教授)と言われたとおり、実際にロボットが破損する可能性があるため、研究開発がほぼ終了しているHRP-2Pを用いて実施されている。現在のところ、重大な破損事故は起きていないという。
そのほか、平均台の上を歩くように足首を直列に揃えて歩く“モンローウォーク”も今回初公開された。
【動画】人間との共同資材搬送デモ (3分19秒:MPEG-1)【動画】不整地歩行 (41秒:MPEG-1)
【動画】モンローウォーク (27秒:MPEG-1)
【動画】転倒制御 (57秒:MPEG-1)
 |
 |
 |
| 人間との共同資材搬送を行なうHRP-2 | 俯せ状態から起きあがる動作をデモ中 | 不整地歩行のデモ。ゆっくりと地面を踏みしめるように進む |
 |
 |
 |
| 今回初公開となるHRP-2P(Pはプロトタイプの意)転倒制御デモ。かなり勢いよく転倒させられるが、臀部にクッションを装備するため、ダメージは受けにくい | 従来公開されたHRP-2Pよりも若干厚みが増したクッション | |
●産業車両代行運転デモ
遠隔操作されたロボットにより、市販の産業車両を運転可能にするもので、川崎重工業株式会社、東急建設株式会社らが中心となって開発を行なった。
今回は昨年12月に公開された内容に加え、新たに階段を使った車両への乗り込み動作、雨天時の作業の様子などが公開されたほか、遠隔操作は無線で行なえるようになった。
昨年12月の公開時では、運転席に着座する段階からデモが実施されたが、今回の乗り込み動作の公開は初めて。
デモを実施したのはHRP-1S。運転席の横に設置された階段を上り、自力で着座したあと、遠隔操作によってバックホウを運転、砂山を掘り返す様子がデモされた。HRP-1Sは背部に大型のバックパックを搭載している関係上、運転席には若干の改造が施されている。将来はより人間の体型に近いHRP-2を使うことで、無改造での運転が可能になるという。
また、HRP-1Sは、産業車両の代行運転が必要になる状況として、雨天時など、悪天候下での作業が想定されているため、「作業用保護ウェア」を装着した状態でデモを実施している。これは200mmまでの雨量に対応できる、ロボット専用の「雨合羽」のようなもので、実際に水を浴びせながらの作業も初公開された。
【動画】階段を登って運転席に座るHRP-1S (6分11秒:MPEG-1)【動画】雨天環境を再現して作業するHRP-1S (1分1秒:MPEG-1)
 |
 |
| 階段を上るHRP-1S。この後、自律的に自分の位置を検出し、座席に座ることができる | HRP-1Sの本体形状の関係で、レバーは着座後にはめ込む仕組みになっている。将来、HRP-2を利用する際には、こういった改造は不要になるという |
 |
 |
| 頭の上から水をかけられるHRP-1S。作業用保護ウェアを装着しているため、問題なく作業できる | |
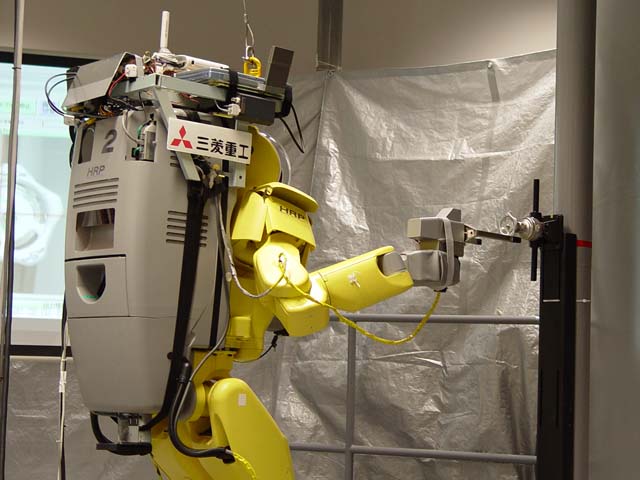
●プラントなど危険地域での保守・点検デモ
ロボットを利用して、稼働中のプラントを想定した保守・点検作業を実行するもので、三菱重工業株式会社が中心となって開発を担当した。
稼働中の原発など、人間が作業するのに不向きな環境下において、ロボットを利用した保守・点検作業を実行することを主眼としたもの。ICタグ誘導による規定の点検コース巡回のほか、異常発生時に想定外の場所に移動して、バルブ開閉などの機器操作を行なうことができる。
想定外の場所に移動する場合は、オペレータが進路上の傷害となる対象物の位置をマウスで指定し、ロボットがそれに応じた方法で移動するもの。
デモでは、ICタグに沿って点検作業を行ない、その後、想定外のルートとなる狭隘路を通って異常発生箇所のバルブを閉める作業を実施した。狭隘路の通行時にはオペレータからの情報入力により、通路の幅をHRP-1が認識し、狭い通路に合わせて自ら「カニ歩き」の動作をして通路を通る様子が見られた。
 |
 |
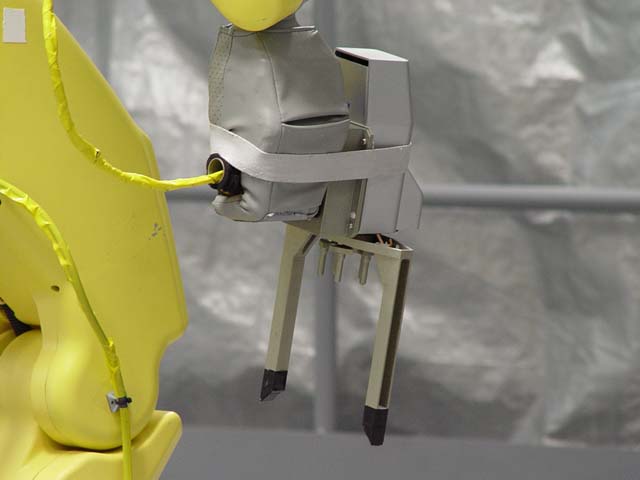 |
| プラントでの保守点検デモ。写真はバルブを閉めるデモの様子。専用の工具をバルブの位置に合わせてバルブを回転させる | 工具の中心に見える3本の棒をバルブに差し込む | |
●介護現場での対人サービス動作デモ
医療現場や介護支援を目的とし、株式会社日立製作所、松下電工株式会社らが中心となって開発した。
ロボットの専門知識がない看護婦や介護者でも操作できるよう、プルダウンメニューを選択することで、簡単にロボットの動作を入力できる「拡張動作ライブラリ」や、直接ロボットに音声での命令ができる「対話エージェント」などで構成される。
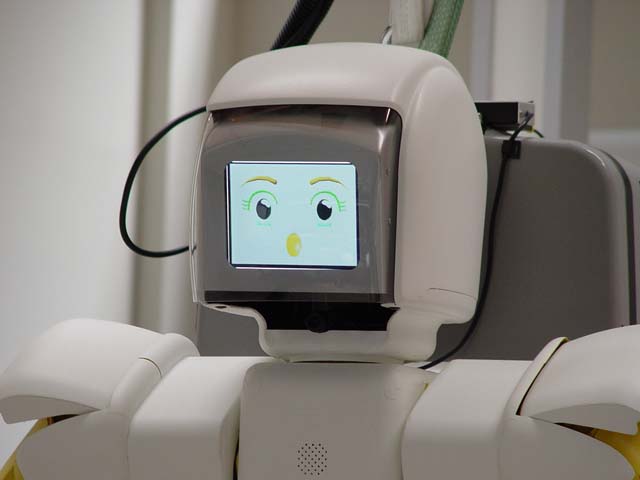
利用されるロボットはHRP-1Sだが、頭部にはロボットの表情を映し出す液晶ディスプレイを搭載し、状況に合わせてさまざまな表情を表現できるようになっている。
デモでは、体操のインストラクションをはじめ、患者の要求によって物を運搬したり、電話の取り次ぎや見舞い客への対応など、さまざまな対人サービスが実施された。
【動画】体操インストラクション (1分10秒:MPEG-1)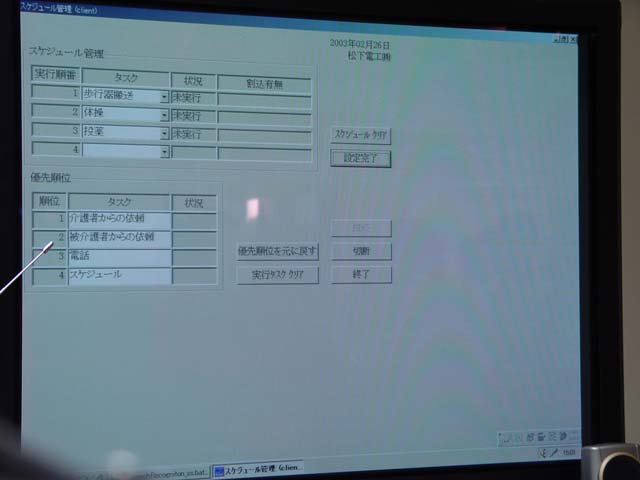 |
 |
 |
| 「拡張動作ライブラリ」の操作画面。メニューを選択することで、大まかな指示ができる | 患者に体操のインストラクションをするHRP-1S | 患者に指示された物をつかむところ。マニピュレータの操作はオペレータの遠隔操作によるもの |
 |
 |
| 対人サービスデモ用のHRP-1Sは表情が変化する液晶パネルを搭載する(左)。移動時など視界が必要な場合はカメラに切り替わる | |
●人間型ロボットによる留守宅管理作業デモ
オフィスや一般家庭を想定した、人型ロボットによる留守宅管理作業で、富士通株式会社、綜合警備保障株式会社らが中心となって開発した。
PDAやPHSなどの携帯端末を用いて、外出先から戸締まりやガス栓の点検などを、ロボットが代行するもの。あらかじめ設定された定型作業のほか、ユーザーが直接ロボットに指示を出す手動作業のほか、侵入者を検知して警報を発することなどが可能。
室内の移動時は、あらかじめロボットに部屋の特徴や作業場所での動作を登録しておくことで、実際の経路はロボットが自律的に生成して移動できる。
会場では、ガス栓を閉め忘れたという想定の下、外出先からロボットに指示を与えてガス栓を閉るデモが公開された。ユーザーが携帯端末から作業場所や作業項目を選択し、ロボットがその項目に合わせて、自律的にガスコンロを発見、スイッチを切る動作を行なった。
 |
 |
 |
| 遠隔地からのユーザーの指示によってガスコンロをオフにするHRP-1 | 窓のカーテンを開けているところ | 棚の上に置かれた空きビンを拾い上げたところ。この後、足下にあるゴミ箱へ捨てる |
□産業技術総合研究所のホームページ
http://www.aist.go.jp/index_ja.html
□ニュースリリース
http://www.aist.go.jp/aist_j/press_release/pr2003/pr20030326/pr20030226.html
□関連記事
【1月23日】【森山】HRP-2 Prometの隠された能力
http://pc.watch.impress.co.jp/docs/2003/0123/kyokai01.htm
【2002年12月19日】産総研、人型ロボット「HRP-1S」による産業車両の代行運転をデモ
http://pc.watch.impress.co.jp/docs/2002/1219/hrp.htm
【2002年12月10日】川田工業、出渕裕氏デザインの2足歩行ロボット「Promet」公開
http://pc.watch.impress.co.jp/docs/2002/1210/promet.htm
【2002年9月20日】働くロボット「HRP-2P」デモンストレーション公開
~ひとりで起き上がれるようになりました
http://pc.watch.impress.co.jp/docs/2002/0920/hrp.htm
【2002年4月11日】産総研、働く人間型ロボット開発の中間成果を発表
~人間との共同作業や建設重機の代行運転などをデモ
http://pc.watch.impress.co.jp/docs/2002/0411/hrp1.htm
【2002年3月19日】人と共同作業を目指すロボット「HRP-2プロトタイプ」発表
~9月には出渕裕氏デザインに生まれ変わり
http://pc.watch.impress.co.jp/docs/2002/0319/hrp2.htm
【2001年11月8日】川田工業、Pentium III搭載の2足歩行ロボット「isamu」を公開
http://pc.watch.impress.co.jp/docs/article/20011108/isamu.htm
(2003年2月27日)
[Reported by kiyomiya@impress.co.jp / aoyama@impress.co.jp]
【PC Watchホームページ】
PC Watch編集部 pc-watch-info@impress.co.jp 個別にご回答することはいたしかねます。
Copyright (c) 2003 Impress Corporation All rights reserved.
|
|