
| [an error occurred while processing the directive] |
|
産総研、Ethernet上での実時間通信をART-Linuxで実現
|
 |
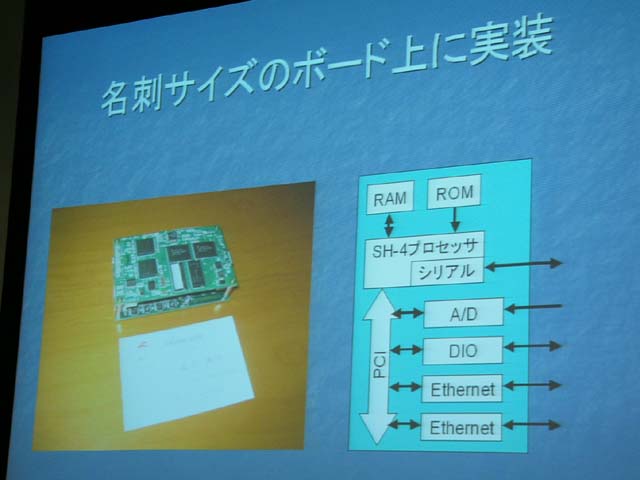
| 名刺サイズのSH-4搭載基板 |
独立行政法人 産業技術総合研究所 知能システム研究部門と株式会社ムービングアイは16日、リアルタイムLinuxを用いてEthernet上で実時間通信を実現する技術の開発に成功したと発表した。
産総研知能システム研究部門はHRP-2などヒューマノイドロボットの研究開発を行なっているグループ。いっぽうムービングアイは、Linuxの実時間拡張版「ART-Linux」を開発した石綿陽一氏らが取締役を務める会社。
 |
 |
| 独立行政法人 産業技術総合研究所 知能システム研究部門チームリーダー比留川博久氏 | 株式会社ムービングアイ取締役 石綿陽一氏 |
ART-Linuxはデバイスドライバに互換性があり、既存のドライバを再コンパイルすることで実時間処理に使え、その都度コーディングする必要がない点が特徴。開発当時('97年~)、石綿氏は旧工業技術院電子技術総合研究所に在籍していた。
EthernetはPCでお馴染みの世界標準ネットワークだが、実時間通信には不向きだと考えられている。「実時間通信」とは、ある一定時刻までに送受信が完了することが保証された通信のこと。たとえばデータを送り始めたあと、20msec後にはデータを送り終わっている通信が、実時間通信である。ロボットなどセンサーフィードバック制御が必要な、実世界で動作する組み込み機器で必須の「実時間処理」のために必要な技術だ。
電子メールやウェブ閲覧など、通常のファイル転送においては数十ミリ秒程度の遅延は全く問題にならない。だが、随時センサフィードバックを行わなければ実空間で動くことができないロボットにとっては致命的な遅れとなる。そのため、データがある時刻までに確実に終了することが必要になるのだ。受信はもちろん、通常のファイル転送のような非実時間通信以外の、音声や動画像データ転送にも必要な技術である。
 |
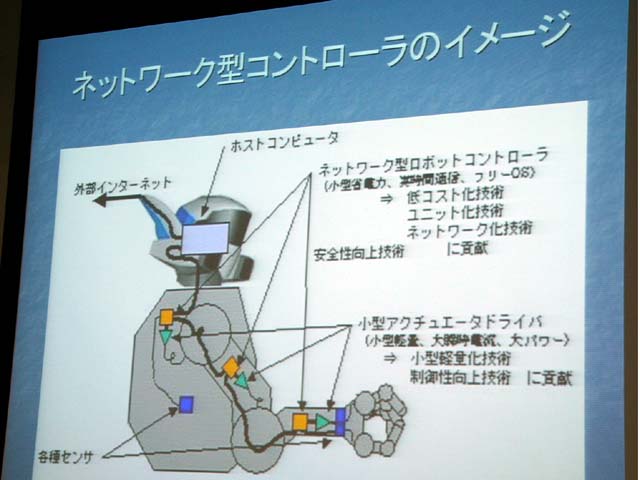 |
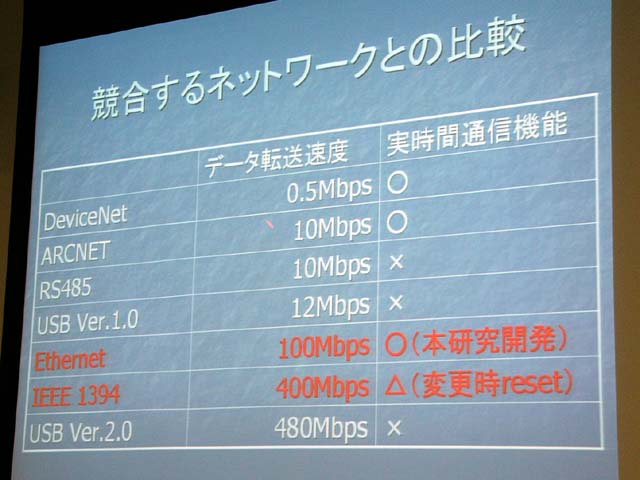
| 競合ネットワークとの比較 | ヒューマノイドでの採用イメージ |
これまで、実時間通信を行なうためにはARCNETやDeviceNetなど、実時間通信機能を持った専用ネットワークを使う必要があった。だがEthernetに比べるとそれらはコストが高い点が問題とされていたという。またEthernetは100Mbpsの速度を持ち、小型ドライブチップで小型化が可能で、物理層やデータリンクプロトコル層の開発が不要であり、TCP/IPネットワークとの共存が容易、といった利点を持つ。そこで産総研とムービングアイでは、ART-Linuxの機能を使って、より安価で簡便なEthernetを使った実時間処理の実現を目指した。
産総研の比留川博久チームリーダーによれば、Ethernet上での実時間通信はできないとされていた理由は下記の3つという。
1)フレームの衝突によって送出が遅れる
2)フレームの送出時刻を制御できるか
3)TCP/IPの処理時間は予測できない
同グループでは、イエローケーブルを使ったバス型配線をやめて、ツイストペアケーブルを使った1対1接続にすることでフレーム衝突の問題を回避。次にART-Linuxの周期実行技術を用いて正確な周期で命令を実行させた。TCP/IPは中継・切り替え以外の用途では一切使わないことにした。そしてデータリンク層に新規プロトコルを設定することで、Ethernet上での実時間通信を実現した。
実時間通信プロトコルの上には、ミドルウェアのCORBA(*1)の通信プロトコルGIOP(*2)を実装。これによって、既存ソフトウェアとの互換性を実現している。
*1:Common Object Request Broker Architecture。分散オブジェクト間でデータをやりとりするソフトウェア技術の仕様が定められている。銀行システムや交通制御システムなどの分野で通信ミドルウェアとして使われるほか、広く分散システムの統合に使われている分散オブジェクト基盤
*2:General Inter-ORB Protocol。CORBAによって仕様が定められるORB(Object Request Broker)と呼ばれる仲介ソフトウェア間の通信プロトコル
これまでにも同様の研究はあったが、非実時間であったり、デバイスドライバの変更が必要であったという。産総研では「この技術は今後、ロボット、情報家電、自動車等の組み込み機器分野で幅広く利用できる」としている。
このソフトウェアは分散型ロボットコントローラとして適用することを目標としている。産総研では名刺サイズのSH-4ボードを開発した。これをネットワーク型ロボットコントローラとしてヒューマノイドの各部分に使っていく予定だという。実時間処理技術が進むことで、将来的にはビジョンの処理結果をさらに活用して、環境適応能力を上げることを目指す。
 |
 |
| SH-4基板のブロック図 | SH-4基板を手にする比留川氏 |
また、現在のHRP-2の内部は非常に配線が多く、信頼性の面でも問題があるが、今後開発を進める次世代ヒューマノイド「HRP-3」は、実時間Ethernetと電源ケーブルだけを使ったシンプルな配線の分散制御型とすることを目標とするという。比留川リーダーは「ロボットの作り方をシンプルなものへと変えたい」と述べた。
同グループが開発を進める、これらモジュール化された機器制御ソフトウェアの基盤技術は「RT(Robot Technology)ミドルウェア」と総称されている。RTミドルウェア自体は新しい機能を持つロボットを容易に構築するためのモジュール化技術の提案であり、ヒューマノイド専用ではない。
ユビキタス化が進む将来は、部屋全体がRTミドルウェアによって制御される時代が来るかもしれないし、ロボットの一部分がボディの外側に存在する、ということも考えられる。もしそうなれば、RTは新しいステージに入ることになるだろう。今回の発表は、その一端となるのかもしれない。
□独立行政法人 産業技術総合研究所 知能システム研究部門
http://www.is.aist.go.jp/humanoid/index_j
□ニュースリリース
http://www.aist.go.jp/aist_j/press_release/pr2004/pr20040616/pr20040616.html
□ムービングアイのホームページ
(6月16日現在、この件に関する情報は掲載されていない)
http://www.movingeye.co.jp/
□関連記事
【2004年4月16日】産総研、「HRP-2」の新歩行機能/走行ロボットを公開
~人間の代替作業ができるロボットを4年後に
http://pc.watch.impress.co.jp/docs/2004/0416/hrp.htm
【2003年2月27日】産総研、「働く人間型ロボット」の最終成果を発表
~突き飛ばされても起きあがれる? 転倒制御デモも初公開
http://pc.watch.impress.co.jp/docs/2003/0227/hrp.htm
【2003年1月23日】【森山】HRP-2 Prometの隠された能力
http://pc.watch.impress.co.jp/docs/2003/0123/kyokai01.htm
【2002年4月11日】産総研、働く人間型ロボット開発の中間成果を発表
~人間との共同作業や建設重機の代行運転などをデモ
http://pc.watch.impress.co.jp/docs/2002/0411/hrp1.htm
【2002年3月11日】人と共同作業を目指すロボット「HRP-2プロトタイプ」発表
~9月には出渕裕氏デザインに生まれ変わり
http://pc.watch.impress.co.jp/docs/2002/0319/hrp2.htm
(2004年6月16日)
[Reported by 森山和道]
【PC Watchホームページ】
PC Watch編集部 pc-watch-info@impress.co.jp 個別にご回答することはいたしかねます。
Copyright (c) 2004 Impress Corporation All rights reserved.
|
|