
| [an error occurred while processing the directive] |
|
産総研、「HRP-2」の新歩行機能/走行ロボットを公開
|
|||||||||||||||||||||||||||||||||||||||||||||
 |
4月15日発表
4月15日、独立行政法人産業技術総合研究所 知能システム研究部門 ヒューマノイド研究グループによって研究成果説明会が開かれた。発表内容は2つ。
1つ目は片手をつくことで大きな段差を乗り越えたり、四つんばいになることで狭いところをくぐり抜けたりする手足の協調によってヒューマノイドの作業機能を拡張したというもの。2つ目は、人間サイズ2足ロボットの走行基礎実験に成功したというものだ。まずは写真と動画をご覧頂きたい。
 |
 |
 |
 |
 |
 |
| 右手を手すりにつき、部分的に体重を預けることで大きな段差(28cm)を上るHRP-2 【動画1】手すりに腕をついて段差を登る |
||
 |
| 低姿勢のまま物体を押す。物体の重さは25.9kg 【動画2】資材を押すHRP-2 |
 |
 |
 |
 |
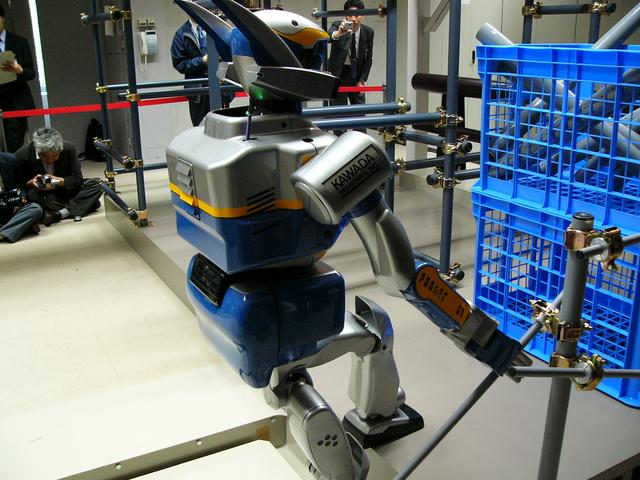
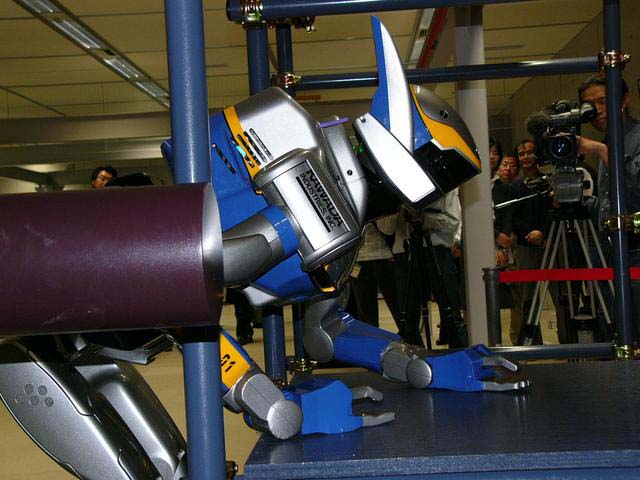
| 両手両足をつき、四つん這いで歩行することで狭い部分をくぐり抜ける。腰の軸をひねりながら歩いている様子が分かるだろうか。歩行速度は時速1kmだが、実際に見るとそれ以上に見える。四つん這いで迫ってくる様子には映画『ターミネーター』の1シーンを連想した。膝小僧には実験の繰り返しを伺わせる擦り傷ができていた 【動画3】四つん這い姿勢で障害をくぐるHRP-2 【動画4】別アングルから |
|
 |
 |
 |
 |
|
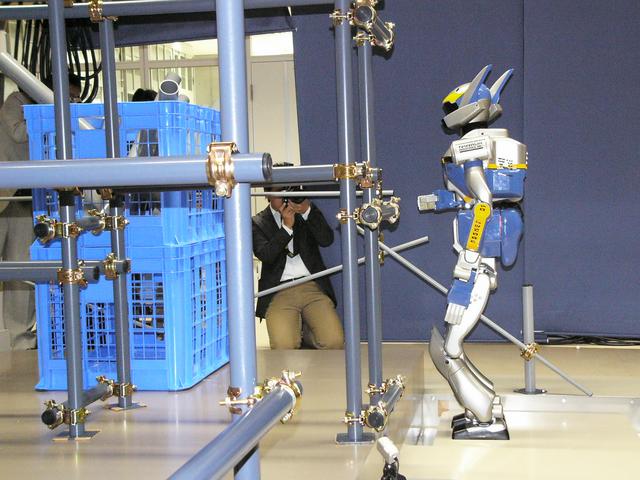
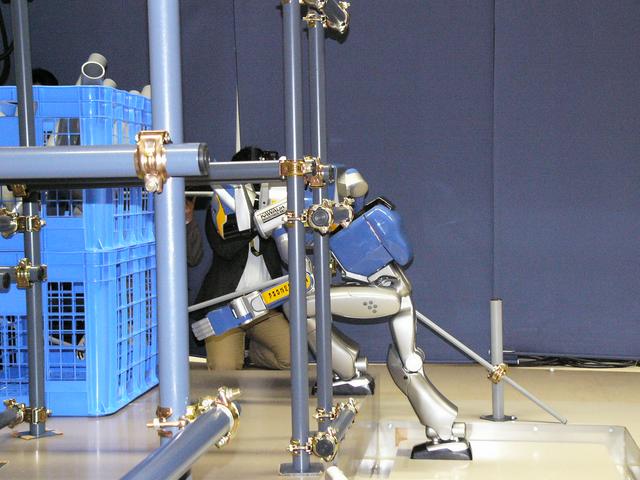
| 机に手をついて、奥に手を伸ばして作業する。高さ50cm、奥行き80cmのテーブルに体を預けながら奥にあるバルブを操作する。体重をあずけながら動く様子が妙に「ロボットっぽい」 【動画5】腕をついて体をささえるHRP-2 |
||
●四つん這いで歩き、腕をついて体を伸ばす
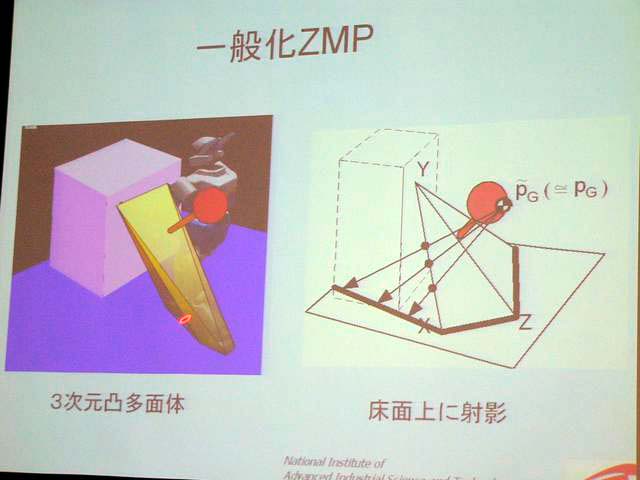
比留川リーダーによれば今回実現した3つの動作(手すりを掴んで体を支えて移動、重い物体を押す動作、机に手をついて体を支えて作業)の技術的ポイントは、人間型ロボットの動作生成指標であるZMP(ゼロ・モーメント・ポイント)を、接触面が同一平面上にない場合に拡張した「一般化ZMP」にあるという。
これまで、たとえば歩行時ならば足裏にZMPがあれば転倒しないといった形で安定化指標としていたわけだが、それを3次元の物体と足以外の部分が接触したときの重心安定指標にまで拡張することで、今回の脚腕協調動作が実現可能になった。
段差に関しては、これまでもつま先を利用して25cmの段差を昇ることには東京大学のH7が成功しているが、手すりを掴むことで28cmの段差を安定して昇ることに成功したのは初めて。
また、押し操作に関しては、ホンダが歩行動作中の押しには成功しているが、今回のポイントは、両足をしっかり着いて押すことで5kgの外力を与えることに成功した点にあるという。机に手をついた作業に関しては、他のロボットが実現した例はない。
四つん這い姿勢への移行は寝ころび起きあがり動作技術を応用して姿勢の遷移を行なったもので、歩行は高出力の腕と腰の旋回軸を利用してトロット歩行を実現した。なお、今回のデモではHRP-2のビジョン(視覚)は全く使っていないが、これからはビジョンを活用する方向で研究を進めていくという(原田研介研究員)。
 |
 |
| 「一般化ZMP」の概念説明図 | 独立行政法人 産業技術総合研究所 原田研介 研究官。シミュレーターで動かしたあと、実機で動作させるまでにはやはり試行錯誤があったという |
●人間サイズの2足ロボットによる走行基礎実験
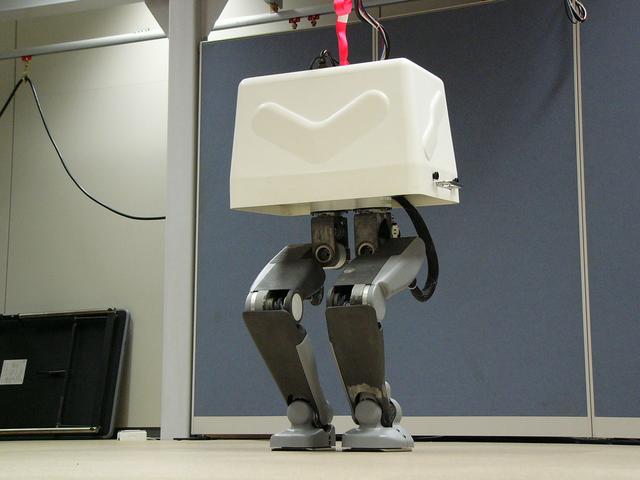
次のデモンストレーションはHRPの脚モジュール「HRP-2LR」による走行基礎実験である。重さは31kg。着地時に作用する100kgを超える衝撃に耐える、川田工業製作の軽量でハードなメカで実現したもの。
 |
 |
 |
| HRP-2LR。足底にはゴムブッシュが入っている。このためQRIOより少し滞空時間は長めになったという 【動画6】走行中のHRP-2LR 【動画7】走行中の脚部アップ |
||
 |
 |
| 走り、右足でケンケンをした。写真では分からないと思うので、動画をご覧頂きたい 【動画8】片足でケンケンするHRP-2LR 【動画9】脚部のアップ |
|
なお走行に関してはQRIOが実現している。だが走ったり歩いたりできる人間サイズの二足ロボットによる実験は世界初となる。ただ、現時点では平均速度0.16m/sec(時速0.576km)。ずっと小さいQRIOよりも遅い。そこで「走行実験」ではなく「走行基礎実験」としての発表となったのだという。
 |
| HRP-2LRとQRIOの比較。QRIOよりも速度は遅いが、滞空期間はわずかに長い |
走行とは完全に両足が離れた状態が存在することを言う。走行時には、片足が地面に着いている接地期と空中期がある。完全に宙に浮いてしまう空中期は自由落下状態、いわゆる無重量状態になってしまう。この両方を扱える運動パターン生成技術が必要だ。
産総研グループでは「分解運動量制御」という手法を開発した。これは運動量を制御することで、重心を制御する技術だという。それによって、空中に浮いているときの姿勢を安定化させた。
今後はより大きなストライドを実現することを目指すことになる。だがそのためには現在のものよりも大きな電圧に耐えられるモーターが必要になるという。逆に言えば、よりパワーのあるモーターができれば、もっと走行らしい走行が見られるということだ。メカの進歩だけで実現できるのであれば、意外と近い日に、ロボットの本当の「走り」が見られる日が来るかもしれない。
比留川リーダーは「まずはエンターテイメントやエデュテイメントから始めつつ、4年後を目処に、実際に使えるヒューマノイドを目指したい。そのために『普通の人間が行けるところにはどこでも行ける』ロボットを作ることが必要だ」と今後の展望と目標を述べた。
 |
 |
| 走行を実現した独立行政法人 産業技術総合研究所 梶田秀司 主任研究員 | 比留川博久ヒューマノイド研究グループリーダー。「いまヒューマノイドの研究開発を中断してしまったら、これまで官民合わせて数百億円以上の投資が無駄になり、日本がトップでなくなる。だからこそヒューマノイドの実用化を目指す」と語る |
□独立行政法人 産業技術総合研究所
知能システム研究部門ヒューマノイド研究グループ
http://www.is.aist.go.jp/humanoid/index_j
□ニュースリリース
http://www.aist.go.jp/aist_j/press_release/pr2004/pr20040415/pr20040415.html
http://www.aist.go.jp/aist_j/press_release/pr2004/pr20040415_2/pr20040415_2.html
(2004年4月16日)
[Reported by 森山和道]
【PC Watchホームページ】
PC Watch編集部 pc-watch-info@impress.co.jp 個別にご回答することはいたしかねます。
Copyright (c) 2004 Impress Corporation All rights reserved.
|
|