 |


■森山和道の「ヒトと機械の境界面」■産業用ロボット展のなかで存在感を増すサービスロボット |
「2005 国際ロボット展(iREX 2005)」は、知能化を目指す新型の各種産業用ロボットのほかに、家庭や公共の場など安全柵の外で人間と直接関わってサービスを提供する、いわゆる「次世代サービスロボット」が大々的に展示され、昨今のロボットをめぐる状況を端的に現す場となった。
サービスロボットゾーンは、展示面積で見ると全体のおよそ4分の1に満たない程度。だが会場内ではかなりの存在感を持っていた。
出展されたロボットの多くは「愛・地球博」で1度展示されたものであり、その他のロボットに関しても、新規のロボットが大々的に発表されたわけではない。そもそもサービスロボットは、いまだにビジネスに結びついたプロダクトではない。いわば卵の段階だ。
しかしながら既に、今後、大きくロボット市場を開拓するものとして熱い期待が向けられている――。そのことを大勢の来場者で賑わう会場の熱気から実感させられた。
背景には自動車産業の設備投資増大に伴う産業用ロボットの活況もあるのだろう。ビジネスの好況と、マスコミや一般社会からの熱い注目。サービスロボットは、ロボット市場を拡大させ得るものなのかどうか。あるいは、どのような方向性ならばビジネスの可能性があるのか。多くの人が注目している。
●トヨタ、2005国際ロボット展の講演で「跳ぶロボット」の開発を発表
 |
2005国際ロボット展では、トヨタ自動車株式会社 専務取締役の井川正治氏によって基調講演が行なわれた。題目は「トヨタパートナーロボット ~トヨタパートナーロボット開発と万博出展ロボットの技術について」。東京ビッグサイトのレセプションホールは来場者でいっぱいになった。
業界最大の展示会の基調講演が、未だ事業化されていないサービスロボットの話というこの一点からも、新しい期待感のようなものがロボット業界全体に漂っていることを感じる。
ここでは、講演内容を簡単にレポートする。
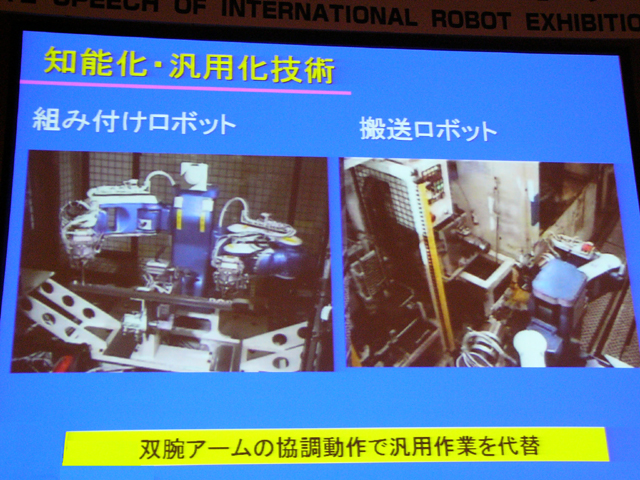
まずはトヨタの産業用ロボットの歴史から始まった。トヨタでは溶接や塗装、組み付けや搬送などの用途にロボットが用いられている。そして最近は、ロボット技術を活用して「インパネ搭載スキルアシスト」を行なうパワーアシスト用機械も導入されているという。機械が人をアシストする技術は既に実用化されているのだ。
 |
 |
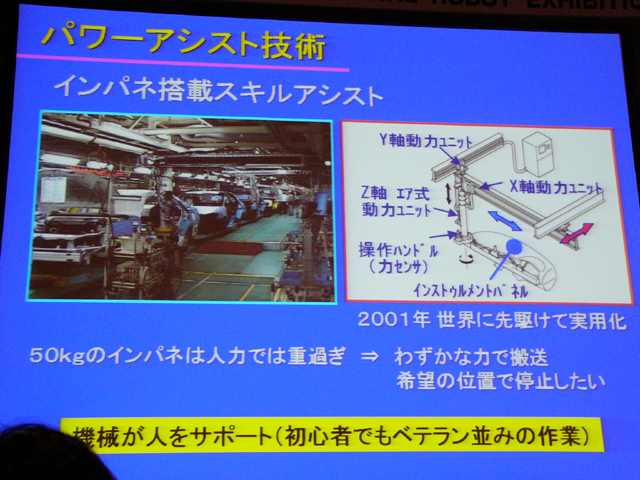 |
| トヨタ自動車株式会社 専務取締役 井川正治氏 | 組み付けや搬送で活躍する双腕ロボットの姿。多くの人が知る産業用ロボットも使われているが、このようなロボットも現場で用いられている | 2001年に実用化されたパワーアシスト技術 |
そんなロボット技術を持つトヨタだが、「パートナーロボット」の開発は、2つのキーワードを立てることから始まったという。1つは「かしこさ」、もう1つは「やさしさ」。安全柵の中にいる従来のロボットの姿から、人と共に活動するロボットを目指すためには、人に合わせた動作能力が必要だとし、そのためにも身長体重比を人間に近いものとしたと語った。
そのほか講演の内容は、基本的に愛知万博に登場したロボットの概略に終始した。車のヨーレートセンサーの技術を発展させて、ジャイロセンサ、加速度センサを組み合わせた「人工三半規管」を開発し、二足歩行ロボットを歩行させたという。また、トランペットは実際に人間に吹いてもらい、それを計測。そのデータと同じように吹くように作りこんでいったそうだ。
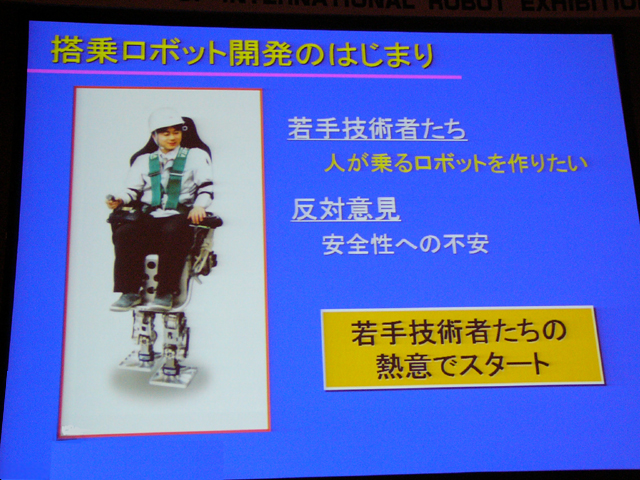
人間が乗り込んで操縦する「i-foot」に関しては開発エピソードも紹介された。「i-foot」は他のロボットとは方向性も違う。また安全性の問題から反対意見も多かったという。だが、若手社員からの「どうしてもやりたい」という熱意で開発が始まった。「当初はアンダーグラウンドで開発が行なわれていた」ため、最初は「UG 1号機」と呼ばれていたそうだ。
その後i-footはシミュレーションや実際の転倒試験を繰り返し、愛知万博ではショーのクライマックスに登場し、観客に披露されることになった。
 |
 |
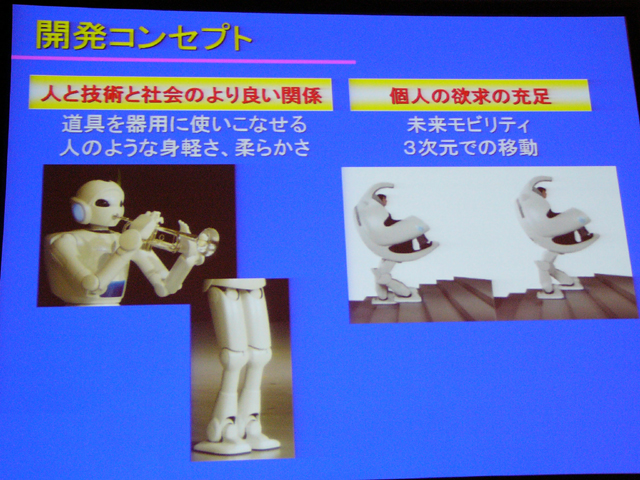 |
| i-foot試作機。当初はヘルメットをかぶって乗り込むマシンだった。大きさも小型で、まさにイスに脚がついている形態 | 完成したi-foot。大型化し、鳥脚型になった。2004年末に行なわれたトヨタによる記者発表で登場した機体 | パートナーロボット開発コンセプト。道具を使いこなせる器用さや柔らかさを実現。新しいモビリティの楽しさを狙ったi-footは階段も登れるという |
トヨタでは、パートナーロボット開発にあたり、各部署から人材を募ると同時に、新規にロボット技術者を採用。関連グループからも応援をつのり、おおよそ100名ほどのチーム体制を組んだという。
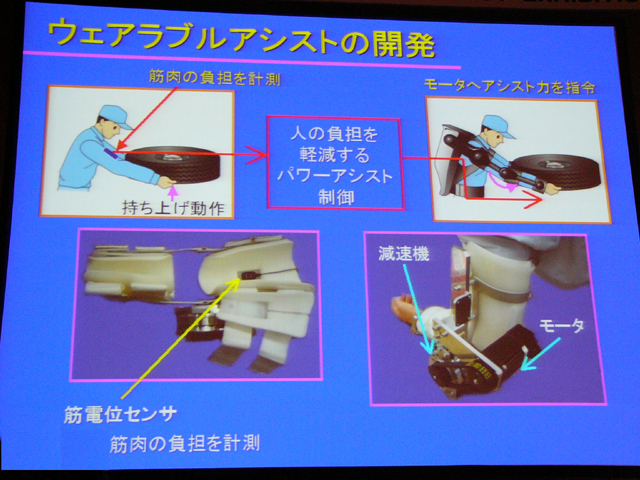
工場で用いるためのウェアラブルアシスト機械の試作も紹介された。また、万博では静展示だけだったワイヤー駆動ロボットについても触れられ、軽量であることなどから将来的に発展させていきたいと語った。万博終了後もロボットの開発は継続して行なわれているようだ。
 |
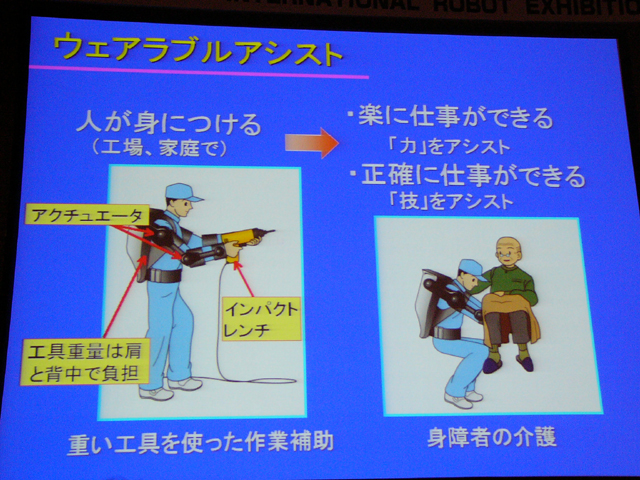 |
| 人の持ち上げ動作をアシストするウェアラブルアシスト機 | 力をアシストするだけではなく、正確な動作をアシストすることも狙う |
 |
 |
 |
| パワーアシスト機の様子 | ワイヤー駆動。関節位置ではなく筋肉位置にアクチュエータを配置できる | 愛知万博で展示されていたワイヤー駆動ロボット。講演ではビデオで動いている様子を紹介 |
井川氏は、今後は、トヨタ自動車単体というよりも、1つの産業としてサービスロボットを位置づけていくと語った。会場からは大学や研究機関に何を期待するかという質問が寄せられた。氏は、たとえばカンやコツをどのように計測するかといった計測技術の高度化が重要と語った。また、機構学などの理論化をさらに進めてもらいたいという。
たとえば、「人間をつかむ」というタスクを考える。これは非常に困難だ。力をくわえすぎるとダメージを与えてしまう。だからといって柔らかくしすぎると、つかまえられない。そこをどう考えて理論づけていくかが大きな課題だという。ここがクリアされないと、介護ロボットもレスキューロボットも実用化の道は遠いからだ。逆に、こういった部分が大学や研究機関で理論化されれば、実際に作るほうは産業界が頑張って製造すればいい、というわけだ。
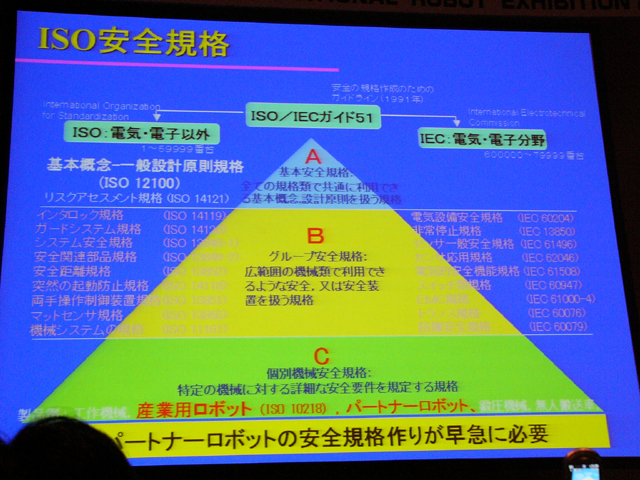
また、安全規格の問題についても触れ、現状ではJISがワールドワイドに規格をつくって引っ張っていくようなものになっていないが、そこは産学協同で動いていくべきだと述べた。なお、トヨタのロボットをイベントや展示場などで検討されているそうだが、安全規格がない現状では、実際に一般客が乗りこんで操作体験するようなことは難しいという。
 |
 |
 |
| 各種安全規格。パートナーロボットを産業化するためには安全規格が不可欠 | 夢のパートナーロボットの姿 | ロボット開発は21世紀のグランドチャレンジであり、若者達に夢を与えるという意味からも今後推進していくという |
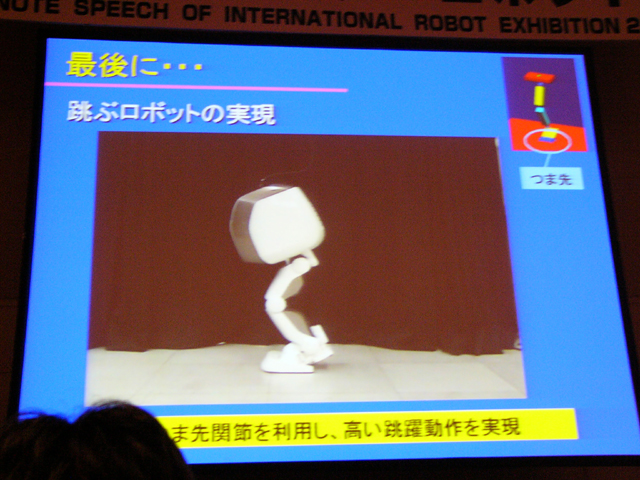
最後にビデオで、ジャンプするロボットの様子がビデオで披露された。ロボットは1本脚。つま先関節を用いることで、高さ約4cmのジャンプを行なうことができる。しかもジョイスティックで方向をコントロールできるという。ビデオでは見事にジャンプし、ケンケンのように跳びはねる姿と、ジョイスティックでの方向コントロールが紹介された。
講演内容のほとんどはこれまでの流れを振り返るものだった。だが、今後もトヨタがサービスロボット開発に意欲を持っていることを示す講演だったと言えるだろう。今後、パートナーロボットの開発が、「i-swing」などの新モビリティ、あるいは先進技術を搭載した車両開発などと、どのように歩調を合わせて進歩していくのか。今後も注目していきたい。
 |
 |
 |
| ジャンプする1本脚ロボット | つま先関節を使って高さ4cmのジャンプを実現 | ジョイスティックで方向をコントロール可能 |
□2005国際ロボット展のホームページ
http://www.nikkan.co.jp/eve/05ROBOT/
□関連記事
【12月1日】2005国際ロボット展開催~産業用ロボットからパックマンロボットまで
http://pc.watch.impress.co.jp/docs/2005/1201/irex.htm
【3月22日】愛・地球博【企業パビリオンB編】ロボットショー中心のトヨタグループ館など
http://pc.watch.impress.co.jp/docs/2005/0322/expo02.htm
【2004年12月3日】トヨタ、「愛・地球博」ロボットショーを公開
~楽器演奏ロボットや搭乗可能な2足歩行ロボットなど
http://pc.watch.impress.co.jp/docs/2004/1203/toyota.htm
(2005年12月5日)
[Reported by 森山和道]
【PC Watchホームページ】
PC Watch編集部 pc-watch-info@impress.co.jp ご質問に対して、個別にご回答はいたしません
Copyright (c) 2005 Impress Corporation, an Impress Group company. All rights reserved.