 |


■森山和道の「ヒトと機械の境界面」■HRP-2、生活支援のための自律能力を向上 |
 |
独立行政法人産業技術総合研究所(産総研)のヒト型二足歩行ロボット「HRP-2 Promet」が、自律能力を向上させ、部屋の地図をロボット自らが作成し、音声認識で命令を受け、冷蔵庫からジュースを持ってくるデモを行なった。
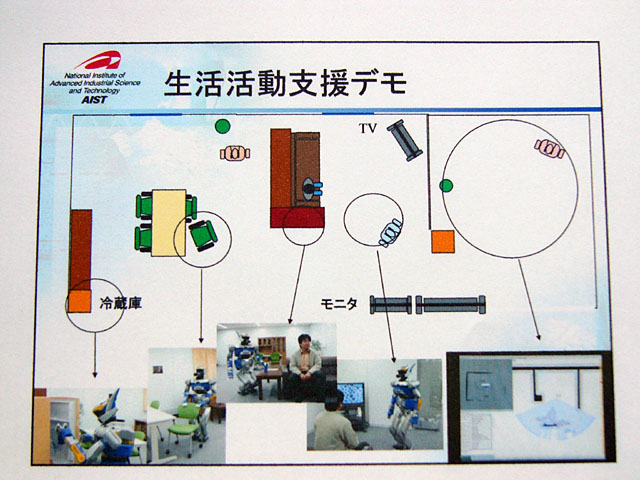
TVを点けた環境下で「ジュースを持ってきて」という命令を聞き取ったHRP-2が、その命令を別のHRP-2に無線LANで送信。その1台が冷蔵庫まで歩いていく。途中には障害物としてイスが置かれているが、HRPはそのイスを片づけた後、冷蔵庫のドアを自分で開ける。そして事前の知識をもとに画像認識で500ml缶を探し、ハンドで取り出し、テーブルまで持っていくというもの。
まずはデモの様子をご覧頂きたい。
 |
 |
 |
| デモの全体構成。TVの近くのHRP-2が命令を受けて、テーブル脇にいたもう一台が冷蔵庫からジュースを持ってくる | 【動画】音声命令を受けて、もう一台のHRP-2が椅子を片づけるまで(QuickTime、約38MB) | 【動画】椅子を片づける様子(QuickTime、約3.4MB) |
 |
 |
 |
| 【動画】冷蔵庫の扉を開ける(QuickTime、約7.8MB) | 【動画】冷蔵庫から500mlのジュース缶を取り出し、冷蔵庫の扉を閉める(QuickTime、約10MB) | 【動画】ジュース缶をテーブルに置く(QuickTime、約15MB) |
 |
 |
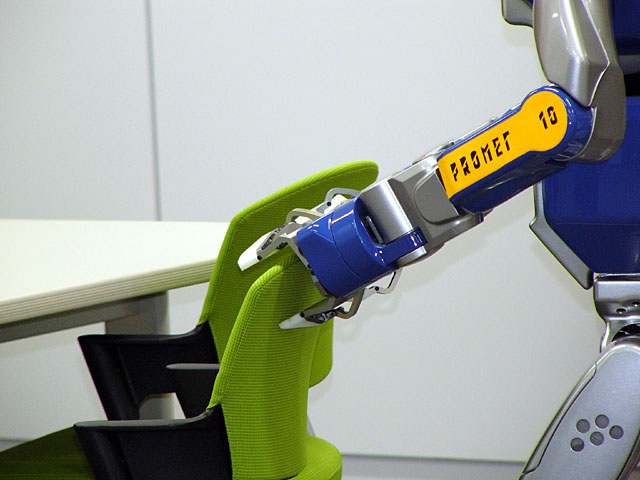 |
| 2台のHRP-2が作業を分担 | HRP-2 10号機が椅子を片づける | 椅子の背を握って押す |
 |
 |
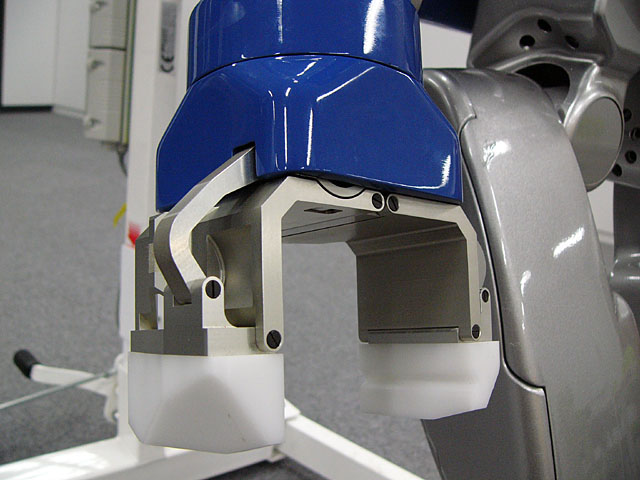
| このHRP-2のハンド部分はモノを挟んで持てるようなグリッパー形状に変更されている | ジュース缶をテーブルに置く |  |
 |
| 頭部。バイザー部下、頬の部分などに全部で8つのマイクが搭載され、マイクロフォンアレイを構成している | 頭部。バイザー内部のカメラ。左は2.8mm広角カメラ。右は「VVV(汎用3次元ビジョン)」と呼ばれる三眼ステレオ立体視システムを構成するカメラの1つ。このほか頬部分にそれぞれ1台カメラがあり、合計4台のカメラが設置されている |
今回のデモは産総研の共同研究「ヒューマノイドロボット型知能ブースタープラットホーム開発(2003~2005年度)」の成果の1つ。生活環境内で人間の生活活動を支援するロボットを作り上げることが目的だ。
我々は残念ながら見ることができなかったが、記者会見の時にはこれらとは別に、HRP-2自体が頭部に搭載されたレーザーレンジファインダーで部屋の3次元地図を作成するというデモも行なわれたようだ。
ロボットは多くの技術の集合体だが、今回発表された研究にも産総研の多くのグループが関わっている。参加グループは以下のとおり。
- 知能システム研究部門ヒューマノイド研究グループ
- 自律行動制御研究グループ
- 3次元視覚研究グループ
- 情報技術研究部門メディアインタラクショングループ
- デジタルヒューマン研究センター・ヒューマノイドインタラクションチーム
まず、自律で歩き回るためには、ロボットが未知の環境でも自律的に地図を作り出せるようにならなければならない。ロボットがどこでも歩き回れるようにするためには、自分自身で部屋の中の状況を把握する能力が必要だ。
そのためには未知の環境での自己の相対位置測定と、地図作成を同時に行なう必要があるが、これは相反する要求でもある。なぜなら、自己位置を推定するためには地図が必要だし、高い精度の地図を作るためには自分の位置を同定することが必要であるからだ。これを解決する手法は「SLAM(Simultaneous Localization and Mapping、スラムと読む)」と総称されている。今回の研究はそれをヒューマノイドロボットで行なったもので、主にデジタルヒューマン研究センターが担当している。
次に生活雑音(今回はTVの音)のある環境での音声認識や音源定位、無線LANを使った家電のスイッチのON/OFF、複数台のロボットの連携に関する研究は、情報技術研究部門メディアインタラクショングループが担当している。
人間の生活支援を行なうためには、まず基本的なことだが命令を与えた人間がどこにいるのか、音源定位しなければならない。ロボットの場合、自分自身の駆動音そのほかもノイズとなるので、それらの音も考慮に入れつつ音源位置を推定することになる。今回の実験はそのシステムをロボットに搭載したもの。今後は、音だけではなく他のセンサー情報や知覚システムを使い、マルチモーダルなセンシング機能の統合を目指していくという。
また、今回は作り込みだが、将来的には、複数のロボットがどこからどこまでの作業を分担するか、いわゆる「分散協調」も、将来、複数台のロボット、あるいは生活環境内に埋め込まれたロボット的機能を持った機械群が増えてくると必要になってくるので、そういった研究も今後行なっていきたいと情報技術研究部門 メディアインタラクショングループの原功主任研究員は語る。
 |
| 情報技術研究部門 メディアインタラクショングループ原功主任研究員 |
「ヒューマノイド・ロボット型知能ブースタープラットホーム開発」のテーマリーダーでもある原氏らは、音響情報と画像情報を確率モデルの1つであるベイジアンネットワークを用いて融合し、人間を発見するシステムを構築しようとしている。
なお、今回の実験では、環境全体、すなわち環境のなかにある椅子やテーブル、冷蔵庫などは全て既知である。基本的にロボットは、どこに何があるのか知っているということだ。ただし自分の位置は未知である。しかし自分の周囲のものがどこにあるのか分かっていれば、センシングすることで逆に自分自身の位置を特定することができる。
冷蔵庫に向かって歩き出すときも、ロボットはだいたいどちらの方角に冷蔵庫があるかは知っている。それをまずビジョンで発見する。だが、例えば「箱形のものがある」と分かっても、それが冷蔵庫なのか段ボールなのかは分からない。それを「これは冷蔵庫であり、扉があり、扉を引けば開くことができる」といったことをロボットが自動的に認識するまでにはまだまだ溝がある。
今回は汎用3次元ビジョンVVVを使ってモデルベースの認識を行ない、冷蔵庫を見つけ、缶を見つけ、それを取り出してテーブルに置くという作業を行なっている。なお今回は椅子を動かして片づけたが、椅子が動かせるものだということもロボットは知っている。ただし、「四輪フリーキャスターで、このくらいの力加減でこんなふうに動くものだ」といった力学モデルまでは持っていないそうだ。
また、ロボットにとっては右手と左手、両腕を同時に使う作業「双腕協調」も意外と難題だ。自分自身の腕が邪魔にならないようにもう片方の腕を動かす必要があるし、なおかつ、両腕を使いながら常に目標を視野に入れられる場所に自分自身の立ち位置を定めなければならないからだ。つまり動作のプランニングである。ロボットが自分でそのプランを獲得するのはもちろん、人間がロボットのプランを作るのも難しいという。
自律行動制御研究グループの横井一仁グループリーダーはその難しさをこう語る。「つまり拘束が多いんです。拘束が多いということは探索空間の中から解を探すことが難しいということです。また、厳密に位置も認識して、ちゃんとしたところに立たないと動作ができません。ちゃんと掴むためには、モーションの精度と認識の精度も必要です」。
人間なら冷蔵庫の扉を開けても、片手でバッと開いて、扉が動いたままの状態であっても何の苦もなく缶を取り出すことができる。しかしながら現状のロボット技術では、まだまだ難しい。「だからまだまだ研究をしないといけない」と横井氏は笑う。今後に期待しよう。
 |
 |
| 両腕を使った作業をこなすためには立ち位置のプランニングも重要 | 自律行動制御研究グループ 横井一仁グループリーダー |
1月23日には、大阪大大学院基礎工学研究科の新井健生教授らによって、HRP-2が実際に人間が乗った車いすを押すという実演も記者達に披露された。HRP-2は各地のロボット研究室で研究用プラットフォームとしての役割を果たしているようだ。本当の意味で実用的なものになるまでには、まだまだかなりの時間がかかりそうだが、とにかくやってみないことには始まらない。
□産業技術総合研究所のホームページ
http://www.aist.go.jp/
□ニュースリリース
http://www.aist.go.jp/aist_j/press_release/pr2006/pr20060123/pr20060123.html
□関連記事
【2003年1月23日】【森山】HRP-2 Prometの隠された能力
http://pc.watch.impress.co.jp/docs/2003/0123/kyokai01.htm
(2006年1月31日)
[Reported by 森山和道]
【PC Watchホームページ】
PC Watch編集部 pc-watch-info@impress.co.jp ご質問に対して、個別にご回答はいたしません
Copyright (c) 2006 Impress Corporation, an Impress Group company. All rights reserved.