
|
防塵防滴、スリップ対応でタフになった
人型ロボット「HRP-3P」
 |
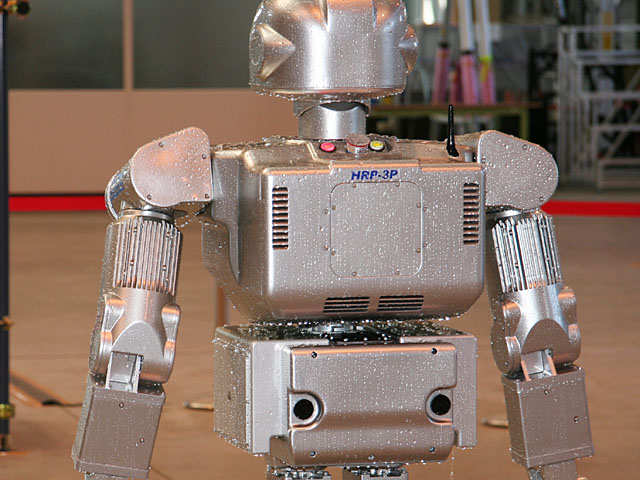
9月8日、川田工業株式会社、独立行政法人産業技術総合研究所(産総研)、川崎重工業株式会社は、防塵・防滴機能を備え、実環境で働く人間型ロボット「HRP-3プロトタイプ(HRP-3P)」を開発したと発表し、デモを行なった。
HRP-3Pは身長160cm、体重65kg(バッテリ含む)。36の関節自由度を持つ。頭部には制御用距離認識3眼ステレオカメラシステムと、遠隔操作用2眼カメラ、合計5台のカメラを内蔵している。メインCPUはIntel Pentium 4 2GHz、OSはART-LINUX。CPUは分散配置されており、それらを体内LANで結ぶ分散制御処理系となっている。通信プロトコルには産総研と株式会社ムービングアイが開発した「実時間Ethernet」を採用している。
経済産業省が'98年から5カ年計画で実施した「人間協調・共存型ロボットシステムの研究開発」、通称HRP(Humanoid Robotics Project)で、同社らが研究開発した「HRP-2 Promet(プロメテ)」は、現在、大学や研究機関などで10体ほどが使われている。
HRP-3Pは、その発展版で、実際の労働環境で働けるロボットの基盤技術開発のために作られたロボット。「P」はプロトタイプの略称である。1時間100mmの雨にも耐えられる防塵・防滴機能を備え、滑りやすい路面での歩行が可能になった。また「一般化ZMP」という手法により、両足だけではなく片腕も添えて体重を支えつつ、もう片方の腕で作業を行なうことも可能。関節自由度も、HRP-2に比べて片腕3自由度(下腕部1自由度、ハンド部2自由度)が追加され、より複雑な作業に対応することが可能になった。
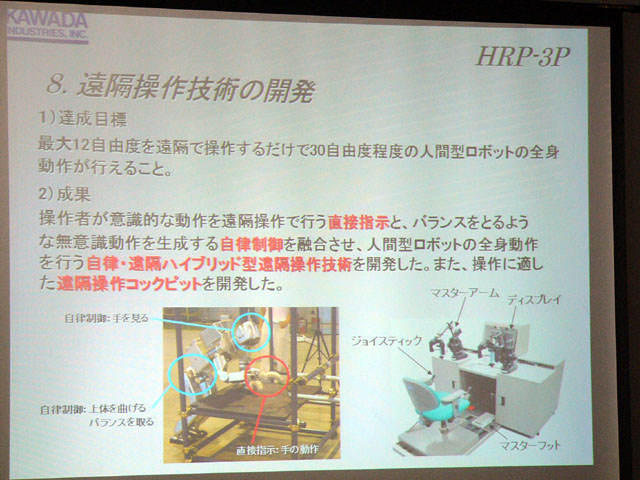
アクチュエータは歩行に適したACモーターを新規に開発し効率化した。バッテリは、これまでのニッケル水素系から重量容量比に優れるマンガン系リチウムイオンバッテリとし、駆動時間を従来の60分から120分にまで伸ばしている。また、簡単な指令で多自由度のロボットを動かすための全身操作技術と遠隔操作コクピットを開発した。
●デモンストレーション
記者会見では、脚腕協調デモ、滑りやすい路面上での歩行デモ、防滴性のデモの3つが行なわれた。その様子を写真と動画で紹介する。
 |
 |
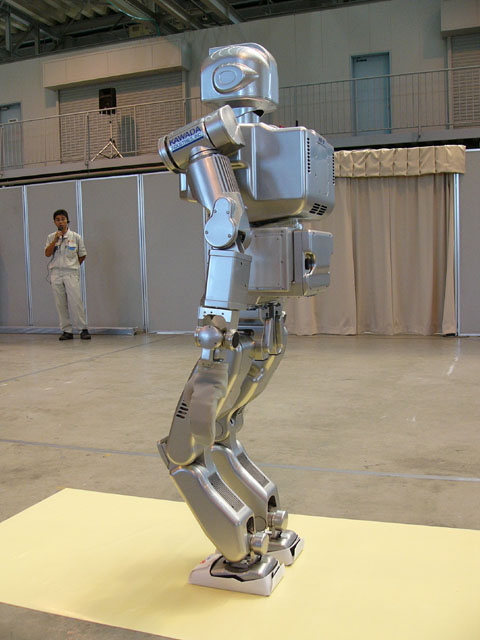 |
| 【動画】歩行で登場。歩行速度は2km/h | マッスルポーズでポージング | 背面。足の長さがHRP-2に比べて4cm伸びている |
 |
 |
 |
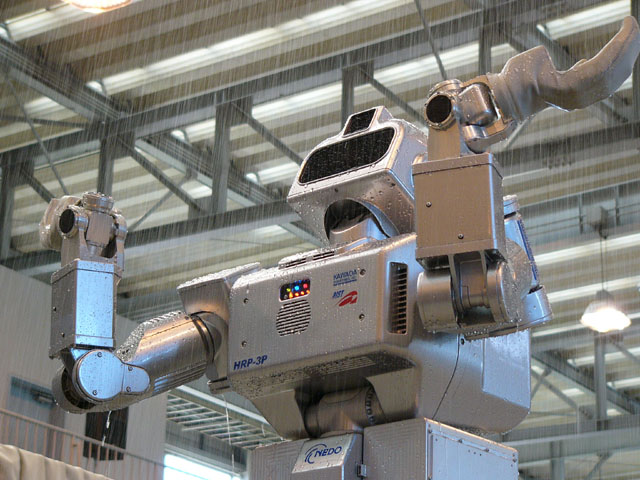
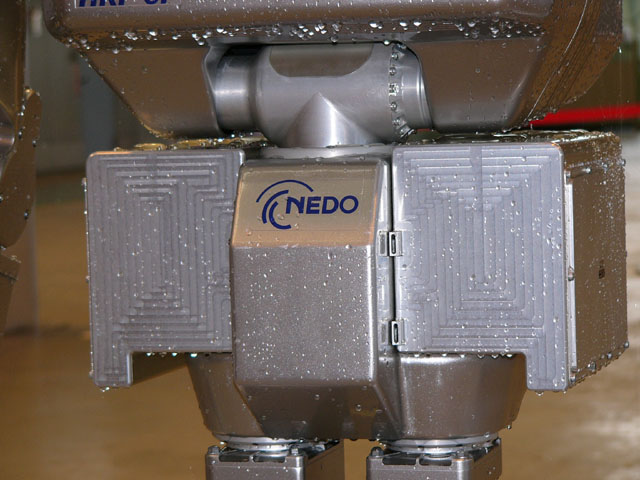
| 防塵防滴のために全身の関節に軸シールや溝彫りなどの工夫が凝らされている。防塵防滴加工を行なうと、熱は逃げにくくなる。冷却性能と防塵防滴性能を兼ね備えなければならないボディ部分の設計にもっとも苦心したという | 自由度の増えた腕部。可搬荷重はスペック表によれば片腕10kgずつ、20kgまで | |
●脚腕協調デモ
まず最初に「脚腕協調デモ」が行なわれた。脚腕協調とは、たとえば、足だけではなく腕も使ってバランスを取りながら作業を行なうこと。腕を伸ばしても手が届かないときに、片手をついて体を伸ばせば手が届くことがある。その場合には重心位置に応じて足を踏み換える必要があるが、そのような作業を「脚腕協調」という。
また、「自律・遠隔ハイブリッド型全身操作技術」を開発。今回のHRP-3Pによるデモでは違う手法がとられたが、すでにHRP-2では、遠隔操作で人間が腕を伸ばして対象物を獲るように操作すると、自動的にロボットが体や足の位置を踏み換える制御ソフトウェアを動作させることに成功している。これにより、人間はあまりロボットの身体的制約に気を遣わずに遠隔操作することが可能になるという。例えば目標が手が届かない位置にある場合、人間がいちいち指示しなくても、ロボットが自分で取るべき姿勢を判断できるようになる。
 |
 |
 |
| 【動画】片手をついて体を支え、奥にあるバルブに手を伸ばす | 【動画】バルブを操作する | 腕を伸ばすHRP-3P |
 |
 |
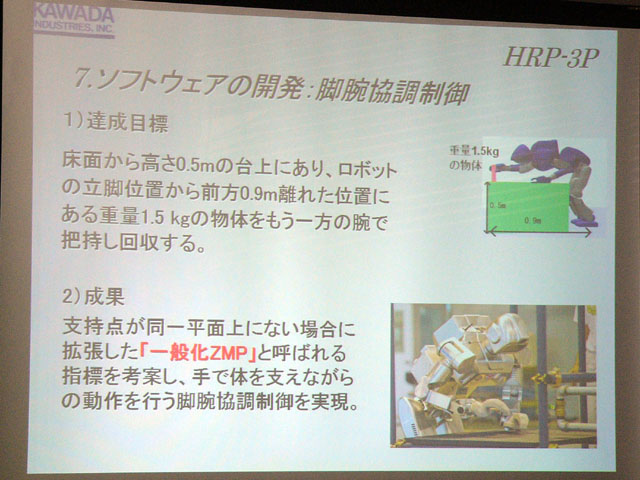 |
| 川崎重工業が開発した遠隔操作コクピット。歩行は手元のジョイスティックで、手先を使うときにはマスタースレーブアームを使う。ディスプレイは裸眼で立体視ができる。だんだん使いやすくなっているという | 自律・遠隔ハイブリッド型全身操作技術の概念図 | 脚腕協調制御の達成目標と成果。「一般化ZMP」技術によって、支持面が床などの平面上に限られてない場合でもバランスを取ることができる |
●滑りやすい路面上での歩行デモ
次に、「滑りやすい路面上での歩行デモ」が行なわれた。滑りやすいテフロンの上を歩行する。摩擦係数はおよそ0.1程度で、氷の上を車で走行するときと同じ程度だという。後ほど記者が実際に歩いてみたところ、つるつるのよく磨かれたフローリングの床を靴下で歩くときと似ていた。
これまでのロボットは滑るとお手上げだったが、HRP-3Pは、滑りを検出し、それによる姿勢の崩れを建て直すことで、多少滑る路面でも歩行できるようになった。
スリップに対する歩容生成が良くできすぎていたせいか、実際のデモでは滑る様子はほとんど分からなかった。だが実際には5mm程度、時には1cm程度ずるっと滑ることがあり、それでも歩行できるのだそうだ。イメージとしては、アイススケートをするときのように、滑りに合わせて上体を移動させるのだという。
 |
 |
 |
| HRP-3Pの足裏そのままでは滑らないので、敢えて滑りやすいスリッパを履かせる | 【動画】歩行の様子 | 【動画】歩行の様子。実際に滑りやすい路面であることを人間が押して確かめる |
●防滴性デモ
最後に、目玉である防滴性のデモ、シャワーを浴びるヒューマノイドが披露された。関節部分など、どうしても水が入る部分では水を流すためのドレーンが切ってあり、内部の重要な部品はシールされている。シール材だけでも重量はかなりのものになるが、その分、他で軽量化しているという。メンテナンス性はHRP-2よりも上がっているそうだ。
 |
 |
 |
| 【動画】1時間100mmの降雨相当のシャワーのなかで動くHRP-3P | 【動画】ずぶぬれになっても問題なく稼動できる | 関節などには水が入ってしまうが、ドレーンによって排水するようになっている |
 |
 |
 |
| 関節部分も容赦なくずぶぬれになるが、問題なく動き続けた | ||
 |
 |
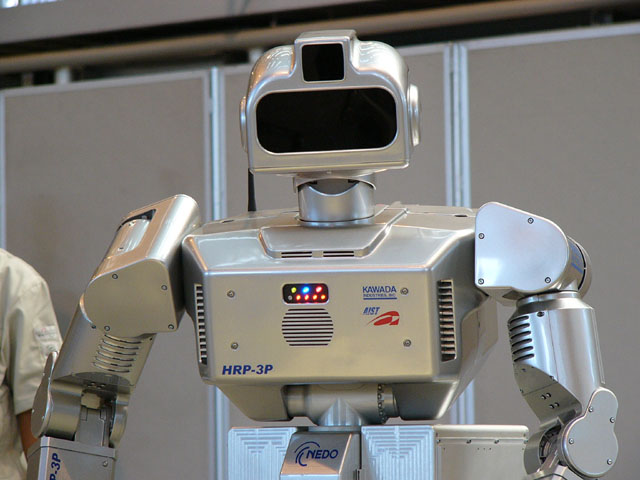
| 頭部には合計5つのカメラが入っている | 川田工業社員とHRP-3P |
HRP-3Pは、独立行政法人 新エネルギー・産業技術総合開発機構(NEDO)が2002年から5カ年計画で実施中の基盤技術研究促進事業「実環境で働く人間型ロボット基盤技術の研究開発」の一環として開発されたもの。ハードウェアを川田工業、ソフトウェアを産総研、遠隔操作技術を川崎重工業がそれぞれ担当している。
今後、HRP-3Pを元に、2006年度中には最終成果機「HRP-3」を開発していく。HRP-3は大学だけではなく、具体的な用途を持つメーカー等の研究開発プラットフォームとして活用される予定だ。そしてその2年後の2008年度中をめどに、一般への販売が可能なヒューマノイド開発を目指していくという。
川田工業株式会社の川田忠裕代表取締役社長は「今後もロボット開発を続けるためには、具体的なミッションを見つけなくてはならない。これまでの技術開発の成果を生かして、完全な二足歩行ではなくても、何か市場に送り出せるものを作りたい」と語った。
□川田工業のホームページ
http://www.kawada.co.jp/
□ニュースリリース
http://www.kawada.co.jp/ams/hrp-3p/index.html
□産総研のホームページ
http://www.aist.go.jp/
□ニュースリリース
http://www.aist.go.jp/aist_j/press_release/pr2005/pr20050908/pr20050908.html
□川崎重工業のホームページ
(9月9日現在、この件に関する情報は掲載されていない)
http://www.khi.co.jp/
□関連記事
【2004年6月16日】産総研、Ethernet上での実時間通信をART-Linuxで実現
http://pc.watch.impress.co.jp/docs/2004/0616/rlinux.htm
【2003年2月27日】産総研、「働く人間型ロボット」の最終成果を発表
http://pc.watch.impress.co.jp/docs/2003/0227/hrp.htm
【2002年12月10日】川田工業、出渕裕氏デザインの2足歩行ロボット「Promet」公開
http://pc.watch.impress.co.jp/docs/2002/1210/promet.htm
【2001年11月8日】川田工業、Pentium III搭載の2足歩行ロボット「isamu」を公開
http://pc.watch.impress.co.jp/docs/article/20011108/isamu.htm
(2005年9月9日)
[Reported by 森山和道]
【PC Watchホームページ】
PC Watch編集部 pc-watch-info@impress.co.jp お問い合わせに対して、個別にご回答はいたしません。
Copyright (c) 2005 Impress Corporation, an Impress Group company.All rights reserved.