|
愛・地球博「プロトタイプロボット展」開催
 |
| モリゾー・キッコロメッセ |
6月9日~6月19日
会場:愛・地球博会場内モリゾー・キッコロメッセ
「愛・地球博(愛知万博)」会場内にあるモリゾー・キッコロメッセで9日、65種類のロボットを展示する「プロトタイプロボット展」が始まった。会期は19日まで。出展者は独立行政法人新エネルギー産業技術総合開発機構(NEDO技術開発機構)。
NEDO技術開発機構は今回の万博を「次世代ロボット実用化プロジェクト」の技術実証の場として、多くのロボットを出展している。特に2010年の実用化を目指した「実用化ロボット」5分野9種類に関しては、万博開幕当初から「ロボットステーション」でのブース展示のほか、NEDOパビリオンほか万博会場内各所でデモ展示を行なってきた。
それに対し今回の「プロトタイプロボット展」は2020年の実用化を目指す、あるいは応用可能性を探索するためのプロトタイプロボット65種類を展示するもの。子供から大人に至る一般来場者に、広くロボットを披露し、「人とロボットが暮らす将来はどのようなものなのかを一緒に考えていくこと」を目指すとしている。平成16年度の事業予算は15億円。9日は開会式も行なわれた。
 |
 |
| 開会式、勢揃いしたヒューマノイドロボット。左からロボビー、ダンスロボット、HRP-2、ながら、ロボビー、wakamaru |
関係者によるテープカット |
会場内は決して広いとは言えない。どちらかというと狭い空間のなかに、ぎゅうぎゅうにロボットと研究者たちが押し込められて展示を行なっている。会場内はロボットのアプリケーションの種類に応じて、おおざっぱに「町並み」、「住宅」、「公園」のゾーンに切り分けられている。各ブースはさらに店舗、病院、工房、ファクトリー、リビング、子供部屋、書斎、庭などに切られている。2020年の暮らしを連想してもらいたいというコンセプトのようだ。
ブースにはヒューマノイド型のロボットは見られない。ではどこにいるかというと、会場内の「ステージ」だ。ステージでは随時15分程度のデモが行なわれているという趣向だ。
実際の展示を見ていこう。
【屋外】
会場の外にはテムザックのレスキュー支援用重作業用ロボット「T-52 援竜・改」のほか、先に本誌でもレポートしたfuRoの「チャリべえ」、そして財団法人にいがた産業創造機構ほかによる自律運行型除雪ロボット「ゆき太郎」がデモンストレーションを行なっている。
 |
 |
 |
| 京都大学大学院工学研究科機械工学専攻 横小路研究室/株式会社テムザックによる「T-52 援竜・改」。重量5t、左右の腕を広げると約10m。油圧駆動される双腕を使えば1tくらいのものならば持ち上げることができる。昨年開発されたモデルから、腕先を変え、自由度を追加するなどして改良 |
援竜のデモの様子。残念ながら今回は、鉄骨を多少持ち上げる程度で、車のドアを引きはがすようなデモはなし |
 |
 |
| 【動画】援竜。最初の「カン」という音は、援竜がつめを合わせた音 |
fuRoによる「チャリべえ」。車輪と足のハイブリッド移動機構を備える。詳細は本誌レポート参照 |
 |
 |
| ちゃりベエ。万博会場ではキッコロのぬいぐるみを載せてデモ |
財団法人にいがた産業創造機構ほかによる自律運行型除雪ロボット「ゆき太郎」。雪をかいて、それをブロック状にまとめて指示された場所に置くことができるという |
【街並みゾーン】
会場内に入るとまず、富士電機システムズ株式会社による街の安全見守りロボット「ライフポッド」が目に入る。その脇には株式会社吉川機械製作ほかによる似顔絵ロボット「クーパー」がレーザーで煎餅に似顔絵を焼き付け、岐阜県セラミックス技術研究所/新栄機工株式会社の「ピクチャーロボット」が陶器に絵付けしている。それぞれ煎餅屋、陶器店のイメージだという。
 |
 |
| ライフポッド。全方位カメラやモニターを備える。自動販売機をロボット化して、街の安全に役立てるというコンセプト |
ライフポッドとロボビーRが通信機能で連携する |
 |
 |
| 中京大学による似顔絵ロボット「クーパー」。えびせんべいにレーザーで似顔絵を描く。単に撮影した顔をそのまま描くのではなく、顔の特徴を捉え、笑顔や泣き顔など書いてもらいたい表情を計算して描くことができる。実は結構高出力なレーザーだとか |
飲食器加飾ロボット「ピクチャーロボット」。陶器に絵付け(加飾)する |
そしてカフェ、バー、病院、電話ボックス、工房、研究所と続く。まずはカフェから。ここでは3体のロボットが出迎える。
 |
 |
| 安川電機の案内ロボット「スマートパル」。身長131cm、重量140kg。腕は7自由度 |
九州大学ほかによるロボットコンパニオン「ももっち」。ロボットをインタフェースとして捉え、ロボットサービスをどのように提供すべきか研究するためのロボット |
 |
 |
 |
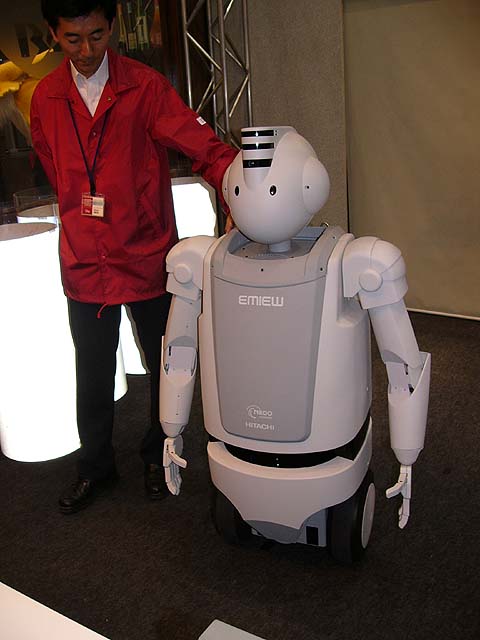
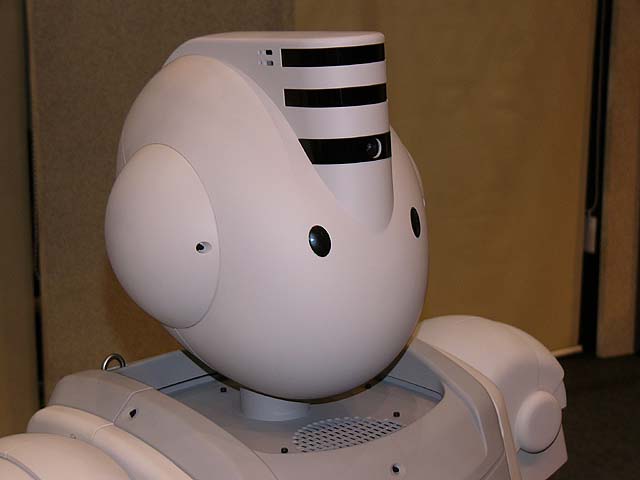
| 日立製作所による「EMIEW(エミュー、Excellent Mobility and Interactive Existence as Workmate。)」。全高は130cm、重量は約70kg。倒立振子を使った車輪型ロボットだが体を傾斜させる軸を持つことで機敏な動作を実現。腕は把持力はほとんどなく基本的にコミュニケーションジェスチャー用とのことだが、ブースでは風船を渡すなどのデモを披露する。将来は書類運びなどの業務をやらせたいという。プロトタイプロボット展終了後も、7月中旬から夏休み期間中は「日立グループ館」でデモ展示される予定 |
次はバー。身振りと音声で会話するロボット2体。
 |
 |
| 株式会社ビジネスデザイン研究所と名古屋大学によるコミュニケーションロボット「DAGANE(Dialogue AGent Applied to Navigation Enhancement、だがね」。複数装着型マイクロフォンで雑音下音声認識を行ない、案内などを行なう |
大阪大学大学院 工学研究科知能・機能創成工学専攻 石黒研究室ほかによる「リプリーQ1 expo」。ロボット単体だけではなく周囲の床センサーやマイク、全方位カメラで人を認識。皮膚はシリコンで再現 |
 |
 |
| 【動画】上半身だけで42自由度を持つ。外部コンプレッサによるエアサーボで駆動 |
リプリーを開発した石黒浩教授。知能ロボット、アンドロイドサイエンスの研究に従事している |
病院でもロボットが活躍する。
 |
 |
 |
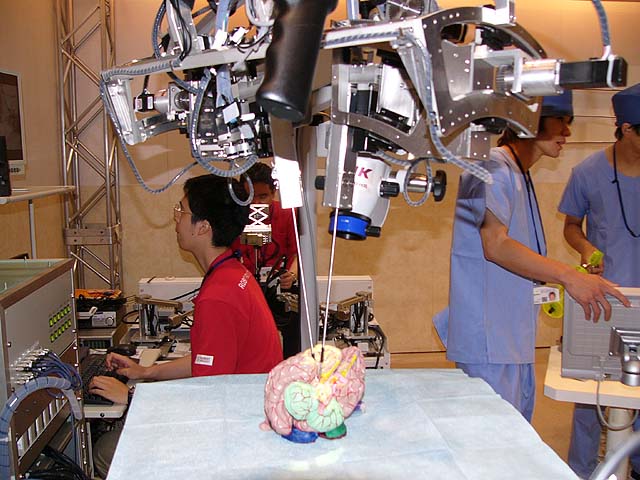
| 古屋大学大学院工学研究科マイクロシステム工学専攻 生田研究室の遠隔微細手術用ロボット「マイクロフィンガー&ハイパーフィンガー」。ヘビのように腹腔内に入り込んで肝臓などを裏側から手術することができるという |
NHKエンジニアリングサービスと東大によるマイクロサージェリロボットシステム。ハイビジョンで立体視を行なう。複数の医師が同じ画像情報を共有することもできる |
医療技術トレーニング用ロボット「超精密人体ロボットイブ」。脳血管形状を正確に再現しており、血管内治療のトレーニングなどに使えるそうだ |
工房エリアでは力覚を使ったロボットが展示されている。
 |
 |
 |
| 埼玉大学工学部機械工学科 綿貫研究室による「サイバーアシストマイスターロボット」。熟練工の技能を力覚と3Dで呈示 |
立命館大学理工学部ロボティクス学科 金岡克弥研究室による「マンマシンシナジーエフェクタ(人間機械相乗効器)」。人間のパワーを増幅する。握力で500kgに相当する力を出すことが可能、重量50kg程度の物体を持ち上げることができる。単に強い力を出すだけではなく、手先の感覚だけで生卵をつかむこともできる |
「マンマシンシナジーエフェクタ」の指先版「パワーフィンガー」。くるみを簡単に割ることができる |
最近、実際の街角からは姿を消しつつあるが、電話ボックスエリアというのもあった。
 |
 |
 |
| 東京大学大学院 情報理工学系研究科 舘/川上研究室による未来の電話ボックス、テレサフォン(TELEsarPHONE)。マスターシステムとスレーブシステムで1セット。マスター側の動作がスレーブロボットに伝わって動作する。スレーブロボットには再帰性反射材が貼ってあるので、スコープを通じてみると、マスター側の人間がそこにいるかのように見える仕組み。以前、筆者のコラムで紹介した |
研究所エリアでは窓ふきロボットやレスキューロボットが展示されていた。
 |
 |
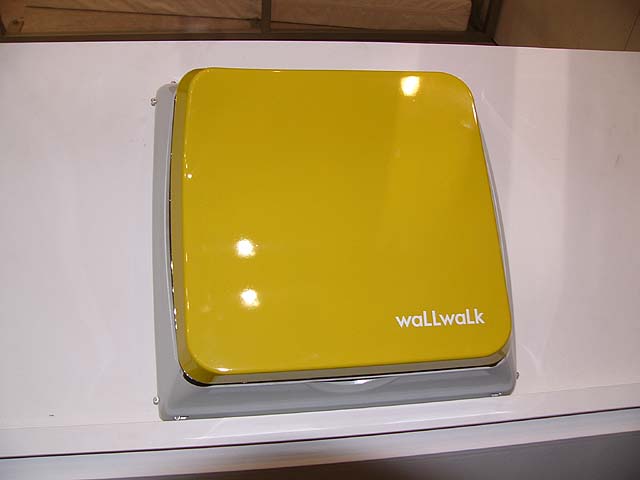
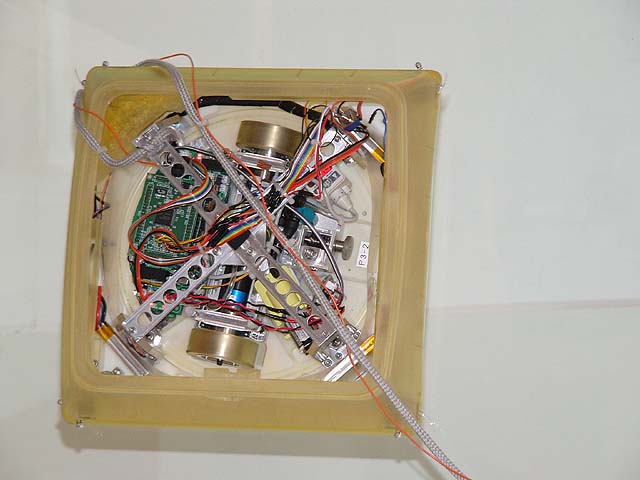
| 株式会社未来機械/香川大学などによる窓ふきロボット「ウォールウォーカー」。壁に吸盤で張り付き、窓を拭くイメージ |
 |
 |
| 神戸大学によるレスキューロボット「MOIRA2」の展示。バギーの脇からはい出しているのが瓦礫探査ロボットMOIRA2。右写真の左は同じく神戸大によるテロ防災用ロボット「UMRS-NBCT」 |
 |
 |
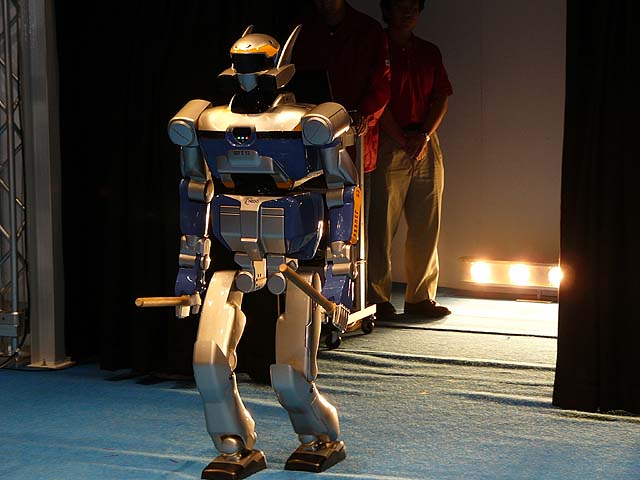
| 石川島播磨重工による脚車輪型ロボット「IMR-TYPE1」。高さは115cm~172cm(可変)。重量60kg。オフィス、病院、プラントなどの警備や受付などを用途とする。外装デザインはロボットデザイナーの高橋智隆氏 |
【動画】普段はエネルギー効率のいい車輪移動、不整地を脚で移動する |
 |
 |
| 壁面を打撃しながら配管内診断するロボット「ドクターインパクト」。岐阜大学と積水化学工業による。重量およそ30kg。長さ83cm |
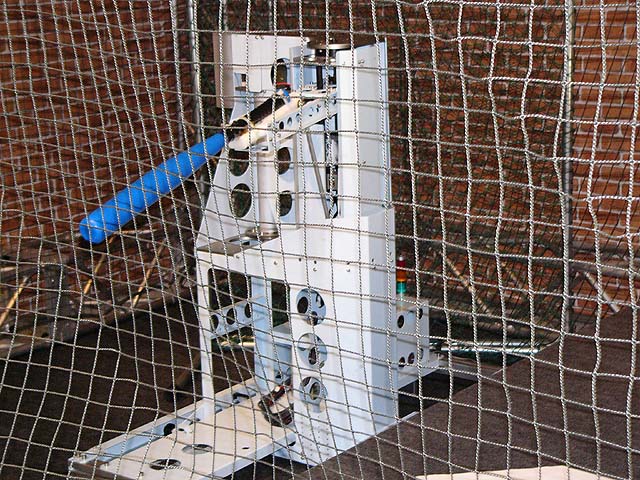
広島大学大学院工学研究科複雑システム工学専攻 石井研究室によるバッティングロボット。毎秒1,000コマの画像を撮影することができるカメラを使い、ボールを打ち返す。ビジョンチップよりも遙かに広い視野を持つ |
【ステージ】
街並みゾーンの次は「ステージ」と「公園ゾーン」。ステージはヒューマノイドロボットを主体としたデモショーが行なわれる。全ては見ることができなかったが、いくつかのデモを紹介する。
 |
 |
 |
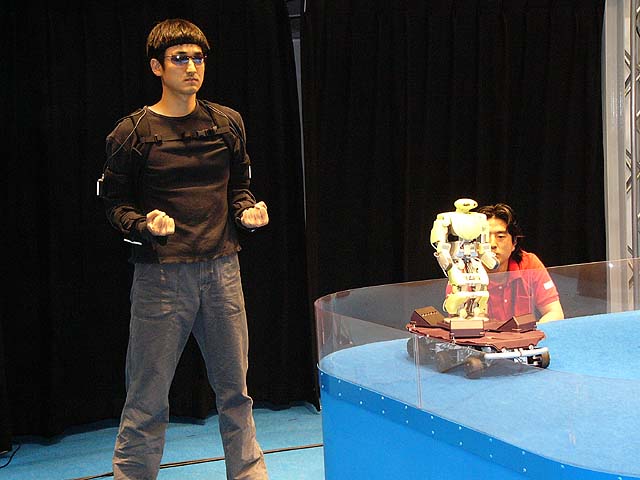
| 千葉工業大学fuRoによる「ハルキゲニア01」と「morph3」を使ったデモ。ハルキゲニアに載ってmorph3が登場、それをウェアラブルなコンピュータシステムで、ジェスチャーを使ってロボットを操る「WINDロボットシステム」で操作するというデモだったが、記者が見ていたときには失敗 |
 |
 |
 |
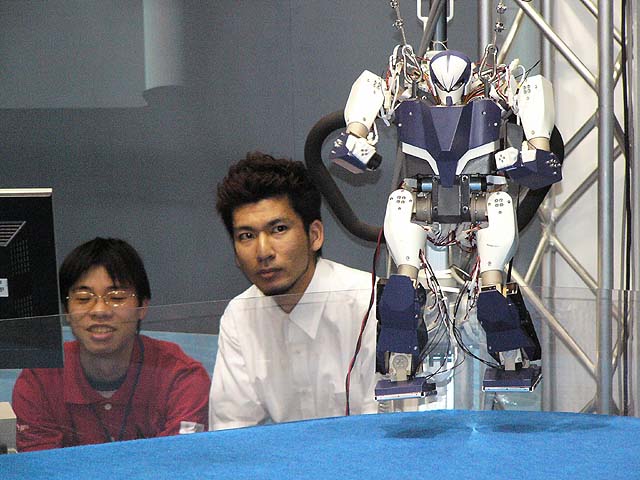
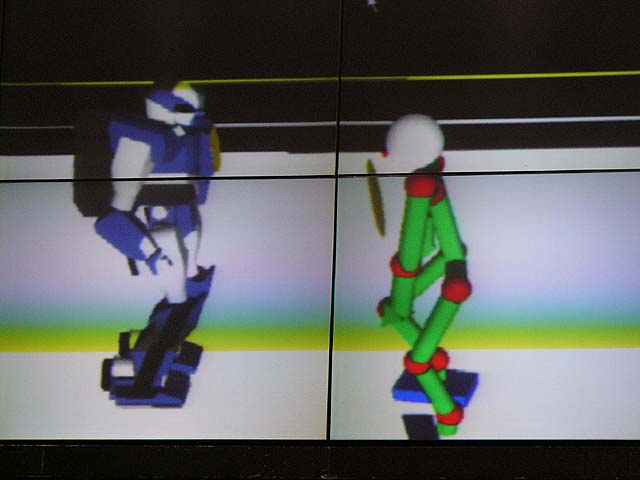
| 東大・中村山根研によるUT-μ2(ユーティーミューツー)。身長58cm、重量6.5kg。関節数23。アクターのモーションを取り込み、その人物とコンピュータ内で戦うというデモのはずが、残念ながら失敗 |
 |
 |
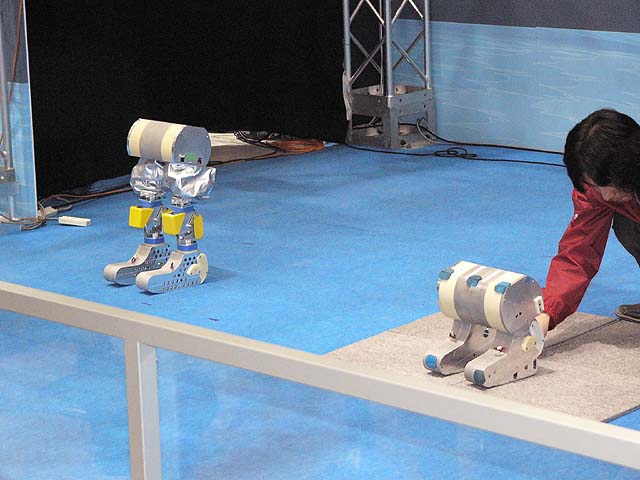
 |
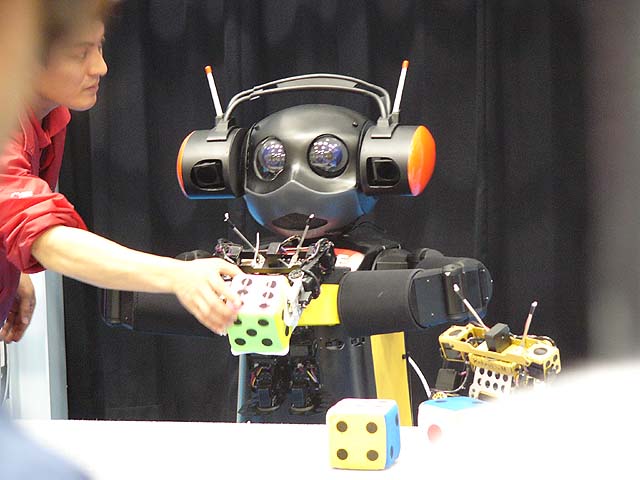
| 親子ロボビー。視野は狭いがこまわりのきく小型ロボットと、広い視野と大きな動作範囲を持つ大型ロボットが相互に協力し、単体ではできない作業をこなすというデモ。たとえば子供ロボビーが持ち上げることができないときには子供ロボビーごと親が持ち上げて運搬する、といった様子が見られる予定だったが、途中で動作停止してしまい失敗 |
九州工業大学ほかによるジャンピングロボット「J2」。クランクやカムチャージャーなど機構に工夫をこらしたジャンピングということで期待したが動作せず |
 |
 |
 |
| 岡山県立大学(http://hint.cse.oka-pu.ac.jp/)によるコミュニケーションロボット「インタアニマル」。ステージ脇で愛嬌をふりまく。開発者の渡辺富夫教授は、うなずきや身振りなどコミュニケーション動作による引き込みなどの研究で知られる |
ダンスパートナーロボット「PBDR(Partner Ballroom Dance Robot)」。男性にエスコートされて2台が登場。身長165cm、重量およそ100kg |
東北大学大学院工学研究科バイオロボティクス専攻 小菅研究室、野村ユニソン株式会社、有限会社トロワゾが開発。外装はFRP、全方向機構で移動する |
 |
 |
 |
| 【動画】社交ダンスは同じステップでもそのときどきに応じたステップ調整が求められる。これは人とロボットの協調作業でも必要なこと。その研究の一環として開発されたもの |
力覚センサーによって外力に応答し、人間と接触して動作することもできる |
【動画】実際に見ると意外と動きがぎこちない。まだ改良の余地がありそうだ |
 |
 |
 |
| 公立はこだて未来大学システム情報科学部 情報アーキテクチャ学科による「着せ替えロボット」。NECのPaPeRoに羽根や腕などの部品を新規に与えることで動作やキャラクターづけを編集する |
【動画】仕立てはミニミュージカル形式 |
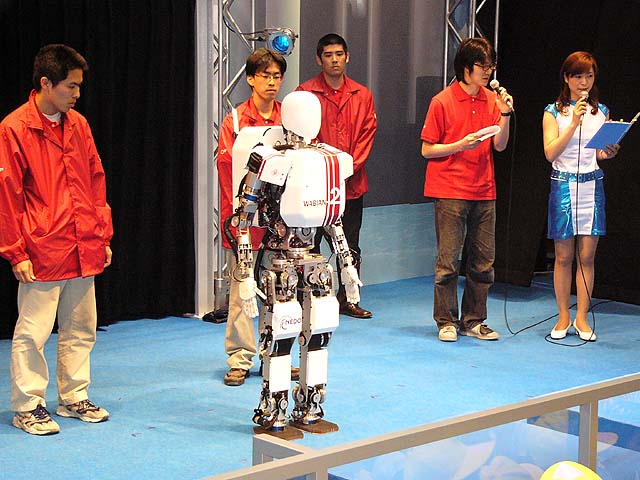
早稲田大学理工学部機械工学科 高西研究室のWABIAN2は、骨盤に相当する軸を腰に持ち、人間に近い歩行を実現したロボット。デモでは電源が落ちるトラブルもあったが、歩行動作のほか、相撲の蹲踞のような姿勢を披露した。
 |
 |
 |
| WABIAN2。身長140cm、重量55kg。関節自由度45。部材はアルミニウム合金 |
WABIAN2の腰。腰の中央部分に2自由度、背骨の付け根に相当する部分に体幹部2自由度 |
 |
 |
 |
| 足は7自由度あるので、骨盤と足の位置を変えずに膝の向きを変える動作もできる |
【動画】WABIAN2の歩行の動画 |
【動画】WABIAN2の腰の動きの動画 |
WABIAN-2は人間が行なう動作ができるように設計されている。将来的には、医療福祉分野において、補助器具などがどの程度人間を助けているか、そのチェックを行なうテストベンチとしても活用していきたいという。
 |
 |
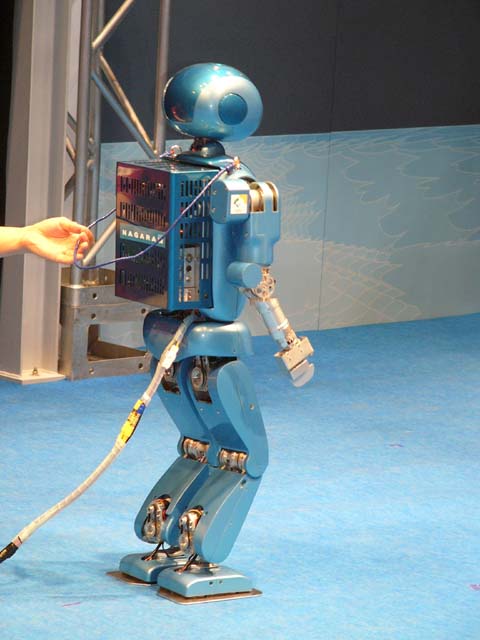
| 「ながら-3」。開発した社団法人岐阜県工業会、岐阜県生産情報研究所では生活サポートロボットと位置づけている |
 |
 |
| 【動画】歩行の様子。身長110cm、重量25kg。自由度29 |
【動画】ボールを蹴る動画。ながら-3の前身「ながら-2」は2002年ロボカップ大会で「ベストヒューマノイド賞」を獲得している |
いかにもNEDOの展示らしく、研究用プラットフォームとして開発されたHRP-2の活躍も目立つ。まとめて紹介する。
 |
 |
| 東北大学大学院工学研究科航空宇宙工学専攻 内山・近野研究室によるインパクト動作デモ。太鼓を叩く。すばやく、また反発力を伴うような動作はロボットのバランスを崩す可能性があり制御が難しいが、そこをうまくバランスさせることに成功 |
 |
 |
| 【動画】太鼓を叩くアクションは、人間で言えば「腕だけで叩いてる」感じで、いまひとつダイナミックさに欠ける |
【動画】別アングルから |
 |
 |
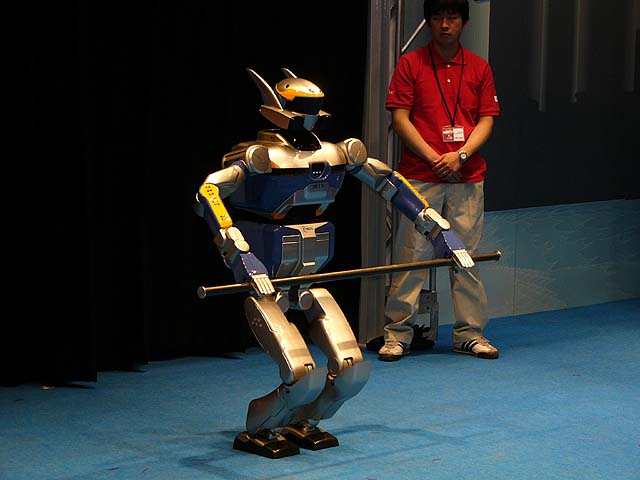
| 棒術の演技。人間の動きを取り込んで再現 |
【動画】これも仮想の敵を打突したときの衝撃を計算しながら動いているという |
 |
 |
 |
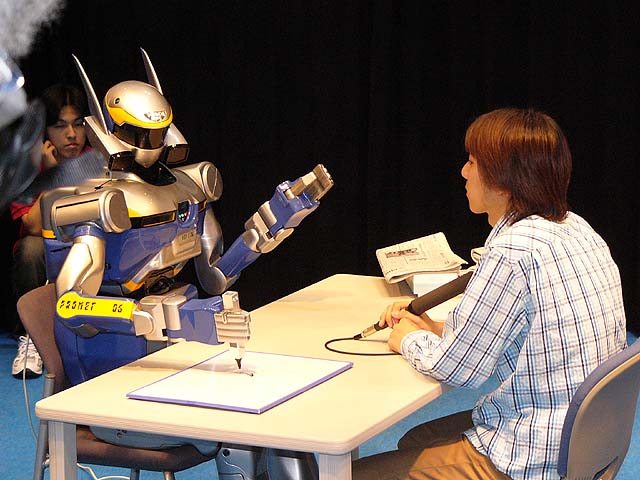
| 奈良先端科学技術大学院大学、和歌山大、産総研による、人とインタラクションするデモ。これは似顔絵を描いているところ。顔認識、音声認識能力などを持つ |
【動画】「新聞をとって」と言われて、とって渡そうとするが失敗 |
このデモは椅子に座ったロボットとの対話形式だが、HRP-2は自分で椅子に座るわけではなく、最初から座らせられている。撤去される様子 |
 |
 |
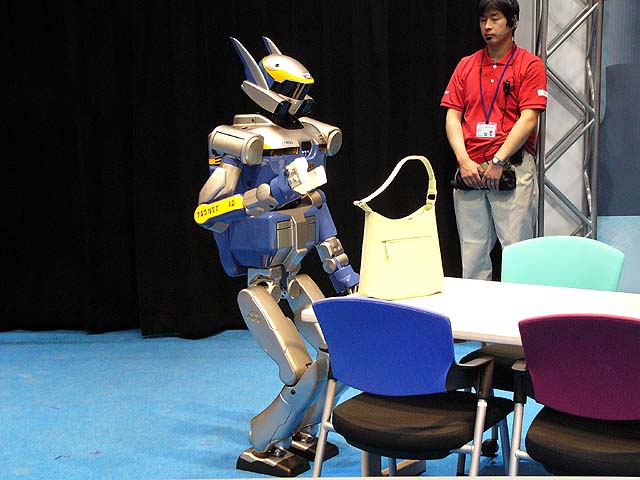
| 産総研によるHRP-2 10号機は、半未知環境(全くの未知ではなく、ある程度前提となる知識が通用する環境)での動作に関するデモを行なう。机の上に置かれた空き缶を発見してゴミ箱に捨てる |
手先は空き缶を掴むために改造されている |
 |
 |
 |
| 【動画】空き缶を掴む様子。ここは自律動作 |
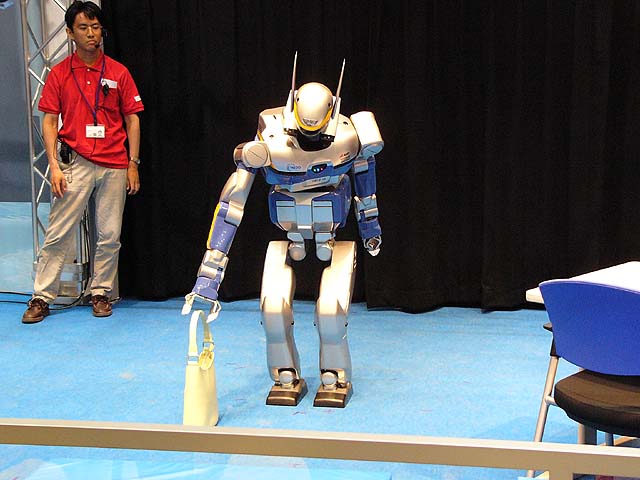
床に置かれたバッグを取り、机に置く。こちらは遠隔操作 |
このほか東大による多自由度ロボット「小太郎」、ロボビーとwakamaruによるロボット漫才、ロボス株式会社によるKOZOH4によるデモが行なわれる。
【公園ゾーン】
ステージの向かいにある公園ゾーンではゴルフロボットや飛行機ロボットが迎える。
 |
 |
 |
| 岐阜県工業界等による奴凧型飛行ロボット。後ろに写っているのはまた別の飛行ロボット東大と大田ビジネス創造協議会による「OBK-SkyEye」。従来の無人飛行機よりも非常に安価だという |
産総研によるアクロバット飛行船ロボット「AAR」。会場ではアクロバットは見せず残念ながら浮いているだけ |
早稲田大学による森林作業支援ロボット「ウッディー1」。木にしがみついてシャクトリムシのように移動し、枝打ちなどの作業を行なう |
 |
 |
 |
| パットをして遊んでいる「キャンディー05」。ニルバーナテクノロジーによる |
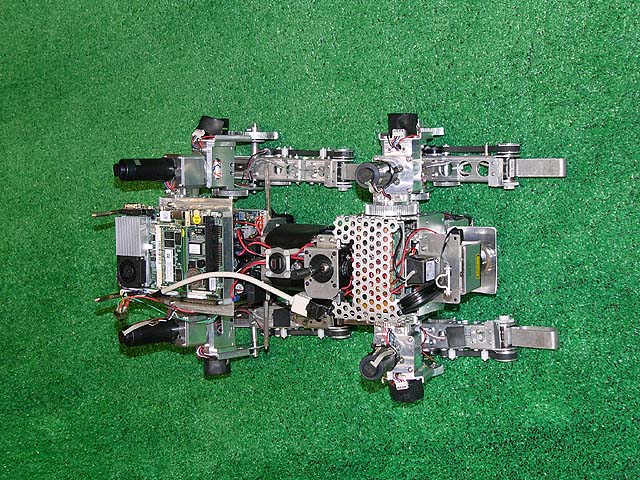
大阪大学大学院基礎工学研究科新井研究室による腕脚統合型ロボット「ASTERISK(アスタリスク)」。大きさは52cmほど。重さは4kg。放射状に配置された足は4自由度を持ち、腕にも脚にもなる。上下も対称で区別がない。2本だけを腕のように使ったり、足先のフックで金網にぶら下がることもできる。操作は無線LANで人間が行なう。赤外線センサーを3台、CCDカメラを6台搭載している |
立命館大学理工学部ロボティクス学科平井研究室による移動跳躍ロボット「KOHARO(コハロ)」。形状記憶合金を使ったアクチュエータでボディを変形させて移動するソフトロボット。名前が気になるが「転がり(KO)跳ねる(HA)ロボット(RO)の略」だという。移動型は約0.15kg、跳躍型は0.005kg |
 |
 |
| 九州大学、テムザックほかによる緊急救護対応ロボット「プレホスピタルケアロボット」。患者が椅子にすわるとバイタルを自動的に計測。患者の前にあるモニターで、患者は医師の顔を見ながらアドバイスを受ける。同時に医師は患者の顔色を見ることができる。そして、椅子は自走し、自分で移動する。動く救護用イスロボットだ。シート部分はそのまま外して救急車などに持ち込むこともできるという。イベント会場などでの使用を想定 |
【住宅ゾーン】
ステージの奥は住宅ゾーンである。リビング・ダイニング、書斎、子供部屋、ワンルーム、リビング、化粧室がそれぞれイメージされている。
 |
 |
 |
| 健康食品アドバイザー。味覚センサーをNECのPaPeRoに搭載。NECシステムテクノロジーと三重大学による共同研究 |
電気通信大学による鉄犬 |
電気通信大学によるマッスルスーツ |
 |
 |
 |
| 筑波大学機能工学系 山海研究室によるロボットスーツ・HAL(Hybrid Assistive Leg)。身体のパワーを増幅する。「予測型動作制御」で筋肉が実際に動き出す前に、実際に筋肉が出そうとするトルクを推定、そのおよそ半分の力をモーターで出力する。足だけだったものを全身版に拡張。「サイバーダイン」のロゴは開発者の山海教授らが立ち上げたベンチャー。右腕だけを体験できるコーナーも |
 |
 |
 |
| 【動画】広島大学大学院工学研究科 複雑システム工学専攻 辻研究室による超学習バリアフリーロボットCHRIS(Cybernetic Human-Robot Interface System)の展示の1つ。操作者の生体信号から独自開発のアルゴリズムで操作者の意図を抽出。ロボットアームを自在にコントロールする |
CHRIS技術を使ったユニバーサルエージェント |
【動画】腕につけたセンサーで操作する |
 |
 |
 |
| 産総研による合体変形ロボット「M-TRAN3」(左)と、九州大学大学院工学研究院海洋システム工学部門 木村研究室による強化学習ロボット「スタディアス」(右)。「M-TRAN3」は2自由度を持ったモジュールが複数で合体協調して動作するロボット。「スタディアス」は自分で動き方を学習するロボット。なおこのブースエリアは「子供部屋」という設定 |
岐阜大学工学部人間情報システム工学科 川崎研究室による多指ハプティックインターフェイスロボット「HIRO」。力覚で手触り感を伝える。単に見るだけではない、将来の百科事典をイメージ |
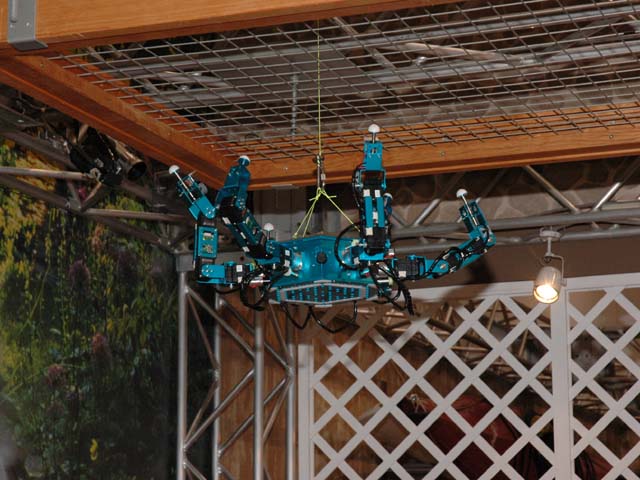
東京大学大学院情報理工学系研究科 佐藤研究室によるロボティックルーム「ハイパーロボット」。床にはセンサーがあり、人間やロボットの位置を認識。天井からもロボットがぶらさがり、サービスを提供する。これも考え方については筆者コラム参照 |
 |
 |
 |
| マイクロマシン技術、VR技術、ロボティクスを組み合わせた「みゅーたん」。立命館大学による。データグローブをつけて作業者が動作すると、マイクロフィンガーが動き、対象物を操作する |
芝浦工大による物理エージェントロボットPAR04R。サービスロボットの基盤技術の1つ「RTミドルウェア」を使った研究 |
東京理科大学理工学部機械工学科 溝口研究室と、東芝によるお供ロボットアプリアテンド |
【ふたたび屋外ゾーン】
会場を出ると、池がある。水陸両用ヘビ型ロボットか、金の鯱型ロボットが池の中を泳いでいるという趣向だ。また、次世代車いすを体験することもできる。もちろんもう一度、援竜の姿を堪能することもできる。
 |
 |
 |
| シーラカンスや鯛ロボットで知られる菱明技研株式会社によるシャチホコロボット。体長さおよそ1m、重量25kg。「弾性振動翼」という技術で、生きた魚のようにひれを動かす |
【動画】悠々と泳ぐ。ひれだけではなく口と目玉も動作する。口のなかにはCCDカメラが仕込まれており、静止画を送ることができる |
【動画】ボディの浮沈はバラストタンクに水を出し入れすることで調整する |
 |
 |
 |
| 東京工業大学大学院機械宇宙システム専攻 広瀬研究室、財団法人理工学振興会による水陸両用ヘビ型ロボット ACM-R5。長さ196cm、胴体直径8cm。重量8kg。蛇行や、らせんで移動し、水陸両用型は世界初だという。動きはリアルだが操縦者が上下左右を判断できなくなるのが難点だとか |
有限会社ロッタによる自律走行車いすロボット |
名古屋工大による鬼ごっこロボットASKA |
9日時点ではステージでのデモは失敗が多く、また登場する予定だったロボットが出てこられない場面もあった。また2020年、ロボットとの暮らしを想定している展示なのだが全体としての統一感はなく、今ひとつ分かりにくい展示だ。
ただ、これだけのロボットが一堂に会することはないし、程度時間が経てば初日よりは安定したデモが見られる可能性はある。またデモが失敗しても、そもそも安定しないロボットの耐久性や再現性を上げることが、ロボット実用化ステージでは重要な課題なのだと実感できるかも。
逆に、問題なくデモを続けているトヨタや他のロボットなどの技術レベルに驚嘆できるようになると言えるかもしれない。
いずれにしてもロボットに興味がある人は、常設展示の「ロボットステーション」を見たあとに足を運んでみることをおすすめする。時間制約のあるステージデモよりもブースを中心に回ったほうがいいだろう。
なお会場となっているモリゾー・キッコロメッセは、モリゾーとキッコロの巡回コース。表で待っているとモリゾーとキッコロたちの着ぐるみがやってくる。運がよければ、記念撮影も可能だ。
□NEDOのホームページ
http://www.nedo.go.jp/expo2005/robot/prototype/prototype.html
□愛・地球博リンク集
http://pc.watch.impress.co.jp/docs/2005/link/expo.htm
□関連記事
【5月17日】千葉工業大学、人を乗せてデコボコ道を踏破する「チャリべぇ」
http://pc.watch.impress.co.jp/docs/2005/0517/chari.htm
【3月23日】【地球博】恐竜ロボットや掃除ロボットなどが展示
http://pc.watch.impress.co.jp/docs/2005/0323/expo05.htm
(2005年6月13日)
[Reported by 森山和道]
PC Watch編集部
pc-watch-info@impress.co.jp
お問い合わせに対して、個別にご回答はいたしません。
Copyright (c) 2005 Impress Corporation, an Impress Group company.All rights reserved.
|