 |


■森山和道の「ヒトと機械の境界面」■人間に手を差し伸べる机、部屋、計算機
|
9月8日と9日の2日間、東大にて<21世紀COE「情報科学技術コア」>シンポジウムが開催された。このシンポジウムならびにCOEプログラムは、東大大学院情報理工学系研究科5専攻と工学系研究科精密機械工学専攻が中心となり、今後の「実世界密着型」の情報科学技術確立を目指すもの。
大きく3つのプロジェクトから構成されているが、今回開かれたのは<実世界情報システムプロジェクト>の国際シンポジウム。日常生活で人間を支える実世界情報システムの構築のために必要なネットワークエージェントやヒューマノイド・ロボット、アテンティブ(Attentive)・エンバイロンメント、ヒューマンインターフェイスやユビキタス、VRなど、各要素技術から幅広い分野の研究者が集まり、今後5年間の研究の方向性やこれまでの成果を報告した。本稿では、オープンハウスと講演の話を混ぜて簡単に報告する。
 |
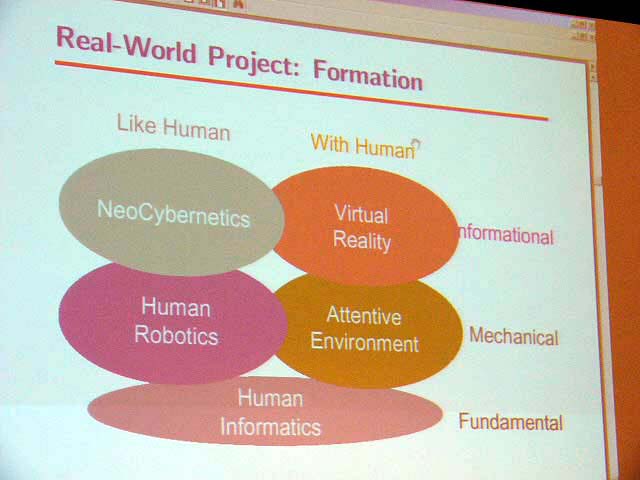 |
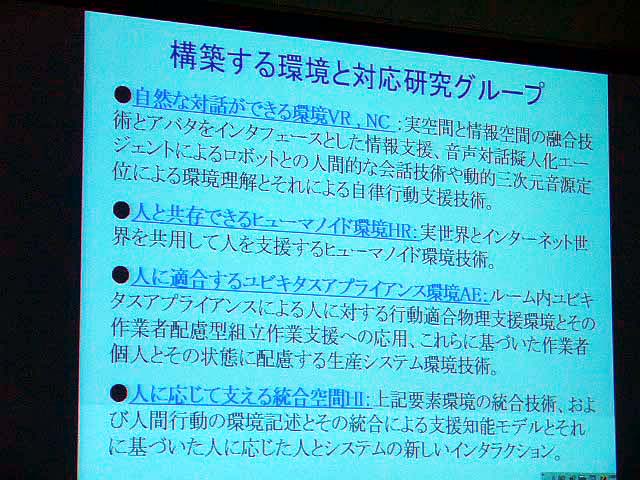
| 構築を狙う環境と対応研究グループ。全てアルファベット二文字の略称を持つ | 各領域の関係 |
このプロジェクトの狙いは、実世界環境の中の人間に対してこれからの計算機や情報科学が、どのようなサービスを提供できるか探ること。新しい情報環境を「実世界情報システム環境」と呼んでいる。各セッションは、ヒューマン・インフォマティックス(HI)、ヴァーチャル・リアリティ(VR)、ネオ・サイバネティクス(NC)、ヒューマン・ロボティクス(HR)、アテンティブ・エンバイロンメント(AE)の5つに分けられている。
井上博允教授による開会挨拶、佐藤知正教授による実世界情報システムプロジェクトの概要の総括講演、『知の創成 身体性認知科学への招待』(共立出版)の著者の1人として知られるチューリッヒ大学AIラボのロルフ・ファイファー教授による「実世界との相互作用 -知的システムの設計原理-」と題された招待講演のあと、各セッションの講演が行なわれた。
【ヒューマン・インフォマティックス(HI) 人間の仮想化】
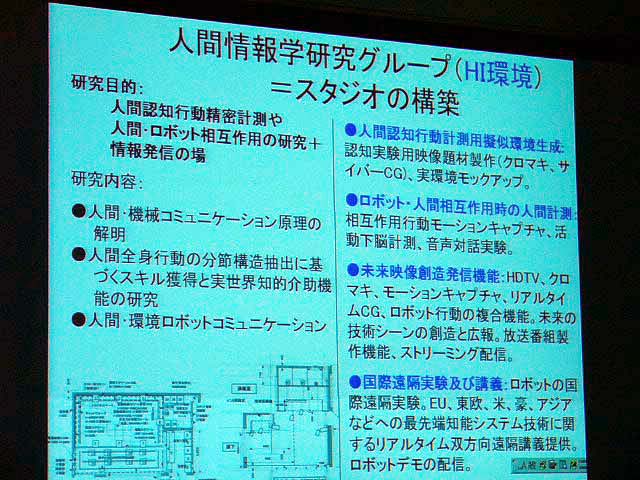 |
| HIグループの狙い。人間の行動を精密に計測してモデルを構築したり、人間とロボットのインタラクションなどを調べる |
「ヒューマン・インフォマティックス(HI)」とは人間を内外から計測したり、ヒューマノイドにダイナミックな全身動作をさせたり、ビジュアライゼーションしたりする研究領域のこと。
人間の動きを取り出して解析したりパターン化したりして、人間のように動くロボットを開発したり、あるいは人間そのものの仕組みを探る研究だ。いわゆる基礎科学に相当する領域である。國吉康夫助教授と中村仁彦教授が講演した。
 |
 |
 |
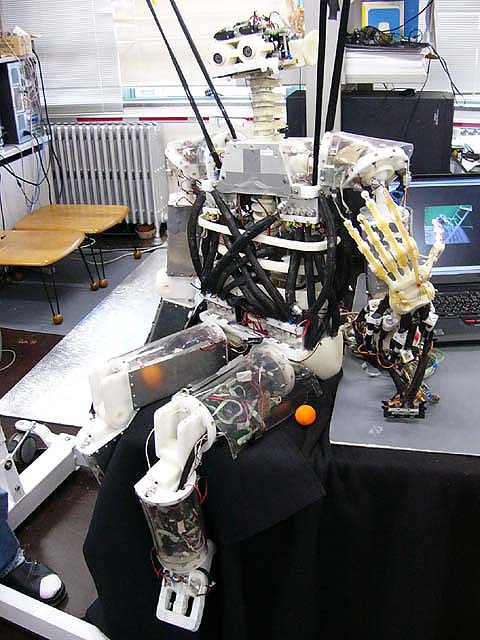
國吉康夫助教授らによるダイナミクスや身体性の獲得を狙いとした研究のためのロボット「RDS-K1」。通称ダニール。160cm、60kg、46自由度。動きにはきっちり制御を効かせるべき節に相当するところと、あまり制御を効かせなくてもいいところがある。いわば動きの「コツ」のようなものがあるという考えのもと、現在、全身を使った起きあがり動作の研究中。そのため全身は丸く、瞬間的に大きなトルクを発生させることができるアクチュエータを持つ。
國吉助教授は、人間の脳内ではもともと各感覚のモダリティに寄らない形で情報表現されていると考えており、人間が目の前の人の動きをつい真似してしまうのもそれらが原因ではないかと考えている。それら諸々の考え方の検証用ロボットでもある。
 |
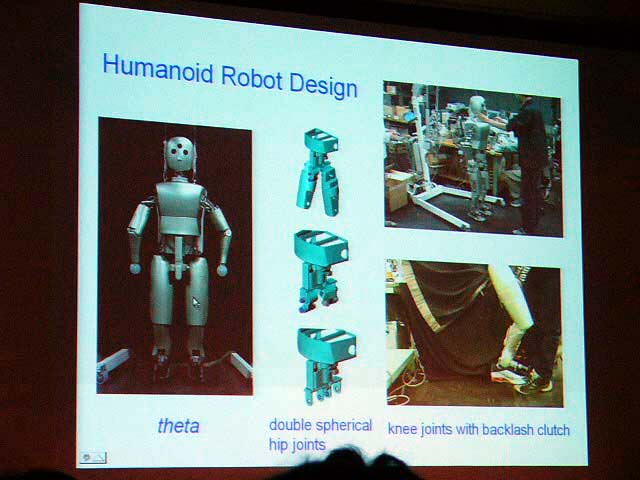 |
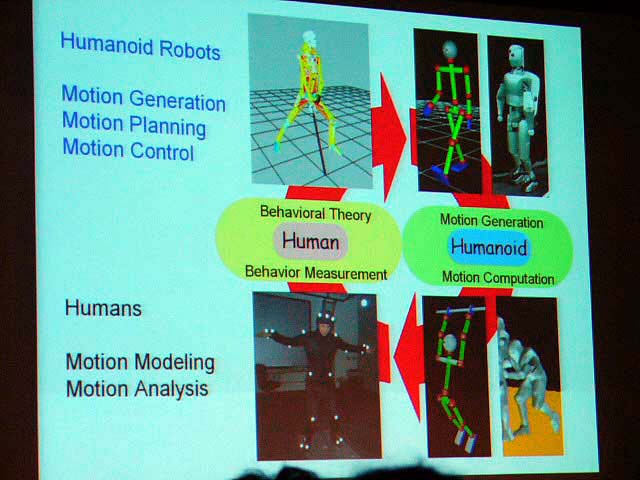
中村仁彦教授の演題は「ヒトとヒューマノイドの情報と計算における双方向パラダイム」。ヒューマノイドのモデルほか、ヒトを計測してデジタルヒューマンを計算機上で構築することを目指す。「バックラッシュ・クラッチ」という機構を使うことで柔らかい膝を持つというロボットの実物は残念ながら公開されなかった。脳科学と計算機の知性との間をブリッジする研究を目指すようだ。
 |
 |
人間の動きを取り込むスタジオは、最初は取り込んだ動きをロボットに反映させることが第一目的だったが、現在では人間の動きそのものに関心のかなりの部分が向かっているという。人間のちょっとした動きを計算機で理解することができれば、人間が何をしたいと思っているのか、ロボットが理解することもできるようになる。
【ヴァーチャル・リアリティ(VR) 実世界と仮想世界の融合を目指す】
ヴァーチャル・リアリティ(VR)に関しては本誌読者には言うまでもなかろう。既におなじみ廣瀬教授や舘教授、苗村健助教授らが講演した。
 |
 |
舘教授が講演で示した円筒型立体ディスプレイ「TWISTER・」(Teleexistence Wide-angle Immersive STEReo-scope)。相互テレイグシステンスを実現するためのLED基盤が回転する円筒型をしている映像提示装置。いわば電話ボックスならぬテレイグジステンス・ボックスのようなものか。
 |
 |
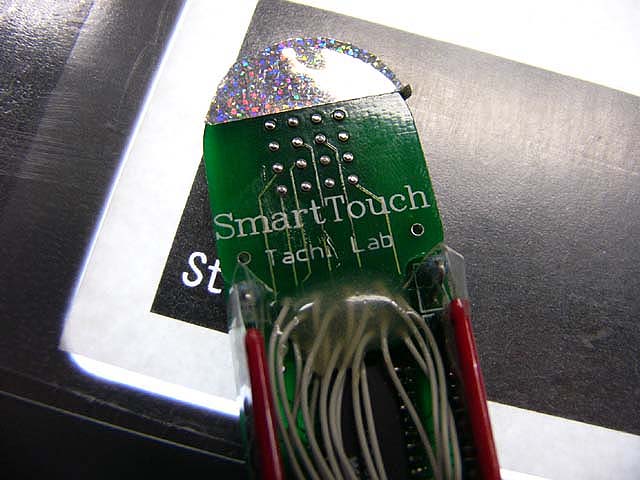 |
「透明人間」になる再帰性反射材を使った「光学迷彩」のデモはやっぱり面白い。そのほか、ロボットの指に使うことを狙った圧力センサや、電気刺激による触覚ディスプレイ「スマートタッチ」などを展示・デモ。
 |
 |
 |
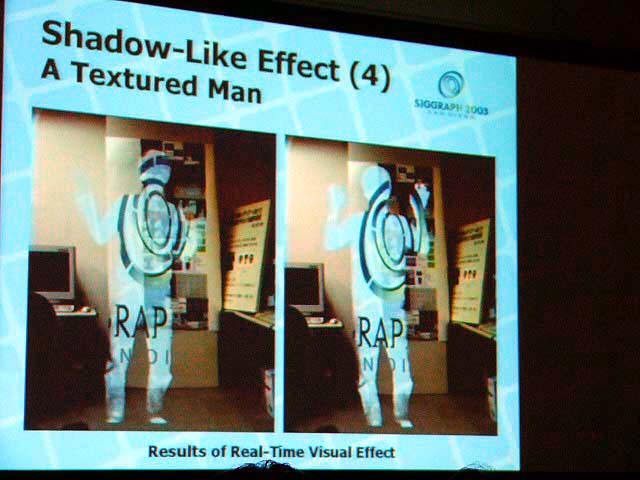
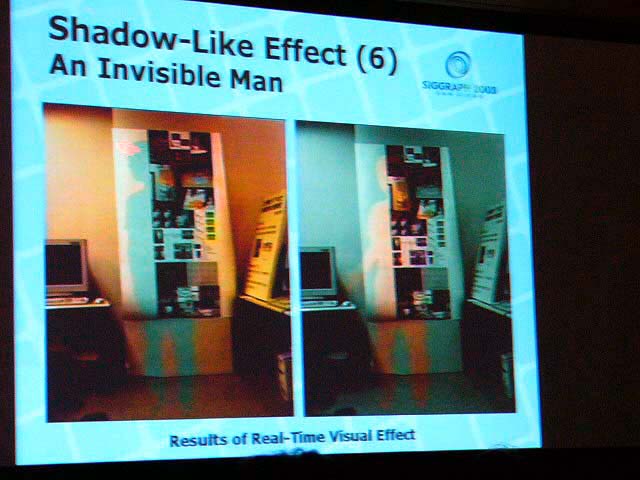
苗村健助教授は、イメージセグメンテーション技術について講演。特にサーマルビジョンカメラによる熱画像を用いて人物領域を切り出す「Thermo Key」を紹介。クロマキーのようなことが簡単にできるほか、人物実画像を仮想空間にアバターとして登場させるといった使いかたもできる。
熱をキーにしているため、人体より冷たいものを体の前にかざすと、そこは非人物領域となり、面白い効果がある。もちろん、周囲の温度が人間の体温と近い環境では使えないが、たいていの環境ならば使えるという。ただ、CRTモニターなどは体温と同じくらいになってしまう。また洋服などが抜けてしまった場合は、みんな温めはじめるのだそうだ。
人間の画像がどれなのかわかっていれば、テレビ電話などで背景を隠すとか、あるいは逆に群衆を映したときに人間の顔だけモザイクをかけるといったことがリアルタイムで可能になる。
 |
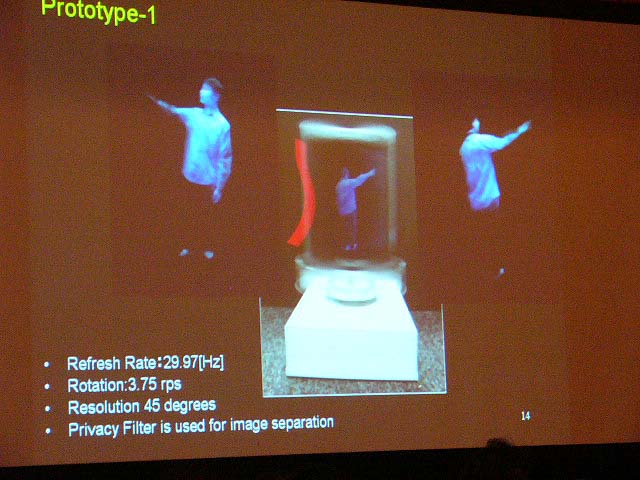 |
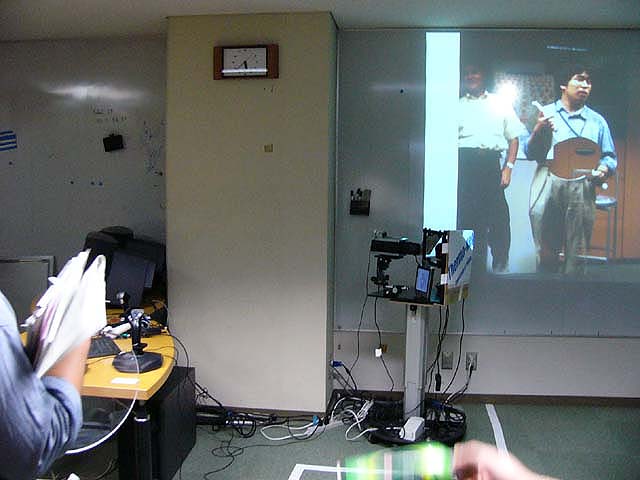
廣瀬教授は実世界でのビデオアバターという考え方を提案。VRが登場したとき、コンピュータのなかに空間を創ることができるという点に注目が集まったように、これまでアバターと言えば仮想空間の存在だったが、実世界にアバターを取り出してコミュニケーションの道具として使おうというものだ。
もしハードウェアでそれを実現しようとするとロボットを使うことになる。だがそれでは写真のようにリアルな姿には成り得ない。そのために現在は可動部を持つディスプレイを制作中。映像を映しだした板をグルグル回すことで、3Dの画像を表示させようとしている。また、アクティブなRFIDタグをキャンパス環境に埋め込んだなかでのウェアラブルコンピュータの研究等も行なっている。
【ネオ・サイバネティクス(NC) 耳をすまし、見つめる機械】
 |
ネオ・サイバネティクス(NC)とは聞き慣れないが、日本語では<視聴覚グループ>と言っているという。このグループでは人間のかわりに見、聞き、動き、対話する機械を実現するために、音や光など物理量のセンシングの技術ならびに、人間の理解、そして機械からのリアクション呈示技術を研究開発するのが目的とする。
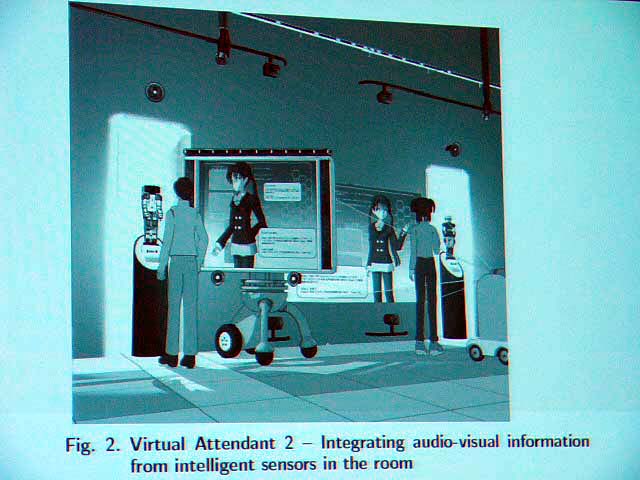
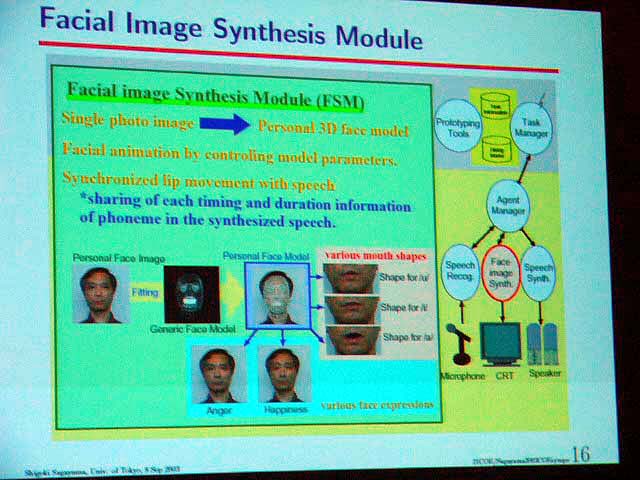
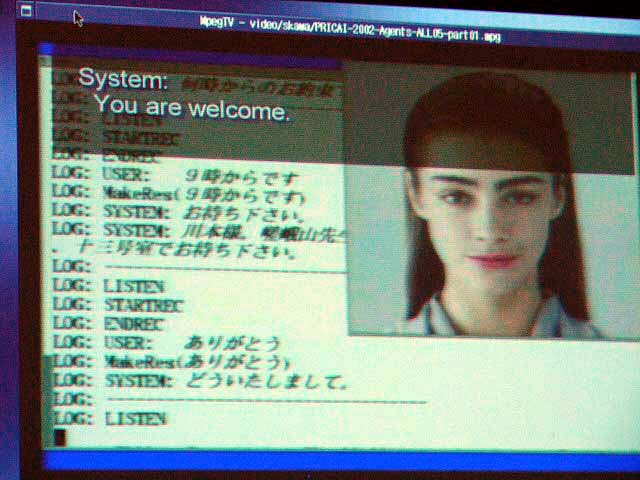
嵯峨山教授らは、人間の知性は人間を相手にするために最適化されているという考え方のもと、人間のようなエージェントを開発する「Galatea」プロジェクトを立ち上げている。題して「視聴覚情報統合プラットフォームとしての擬人化エージェント」。人間の言葉を認識、理解し、人間のような表情、音声で答えるエージェントだ。場合によっては自ら物理的な仕事もする。現在は顔の表情の合成の研究などを行っている。
 |
 |
 |
 |
ガラテアプラットフォームは音声認識・合成、顔のアニメーションなどからなるモジュールからなる。XMLをベースとしたオープンソースとなっており、ウェブサイト上で公開されている( http://hil.t.u-tokyo.ac.jp/ )。
この研究を行なう過程で、基本6感情はあまり信用できないとか、喜びだとか悲しみだとか一言で言えないニュアンスが非常に大事であり、ある表情から別の表情への変化が大事だということがわかってきたという。擬人化エージェントはいろいろなモダリティを統合するためのプラットフォームとして良いのではないかと話をまとめた。正直言ってまだまだ道は遠いなと思ったが、今後に期待しよう。
 |
 |
 |
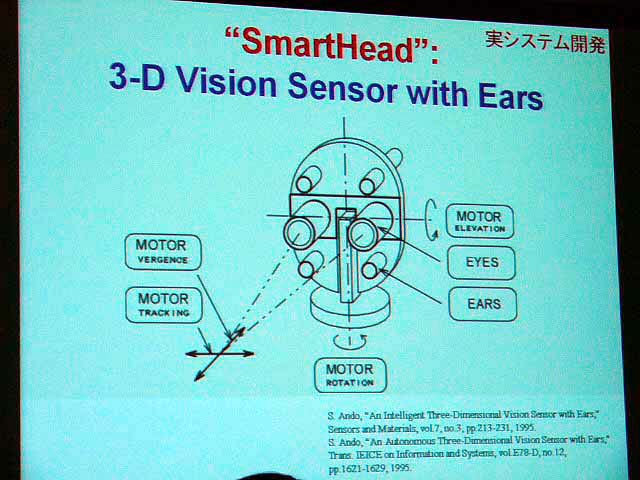
安藤 繁教授は「音場の時間空間勾配に基づく音源定位」という演題で音声のした方向を向く「Smart Head」について講演。環境雑音の中で未知の波形や強さを持つ音源を定位するための研究だ。既に防犯用として実用化もされている。
 |
 |
 |
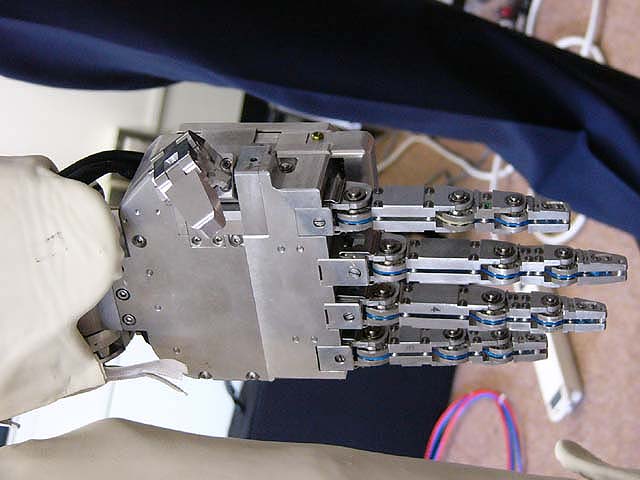
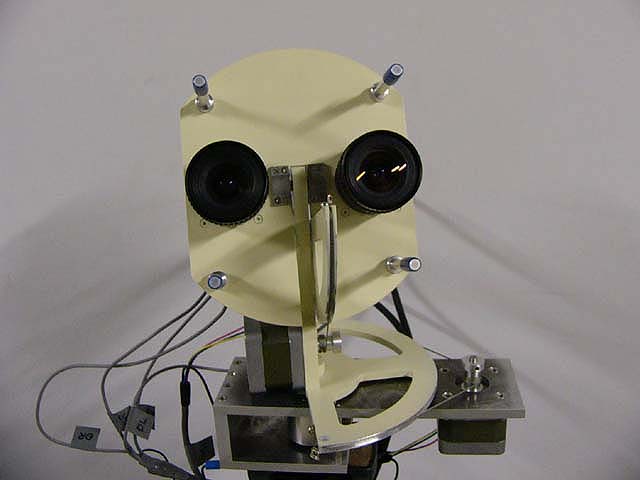
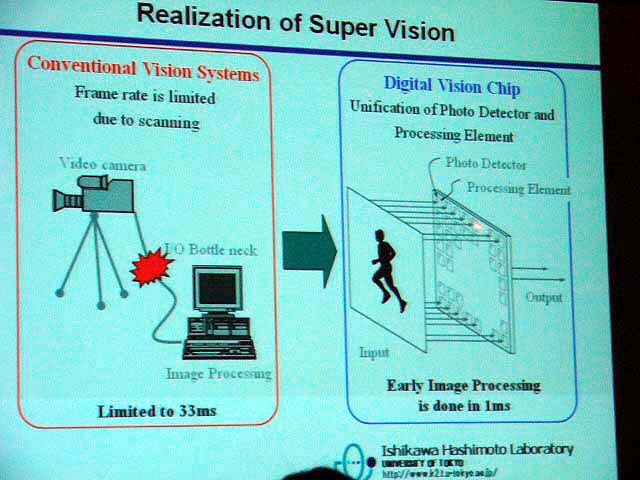
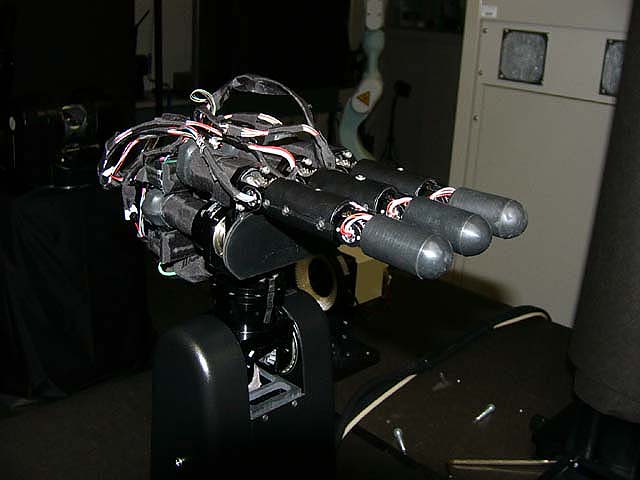
橋本浩一助教授はネットでも話題となった高速ビジョンチップとロボットハンドについて講演。最近はビジョンチップを使ってゾウリムシをトラックし、コントロールする研究も行なっているそうだ。
【MITのOxygenプロジェクト】
 |
 |
 |
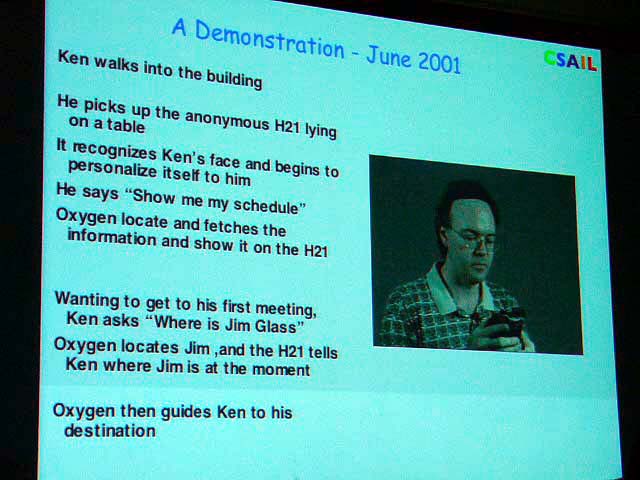
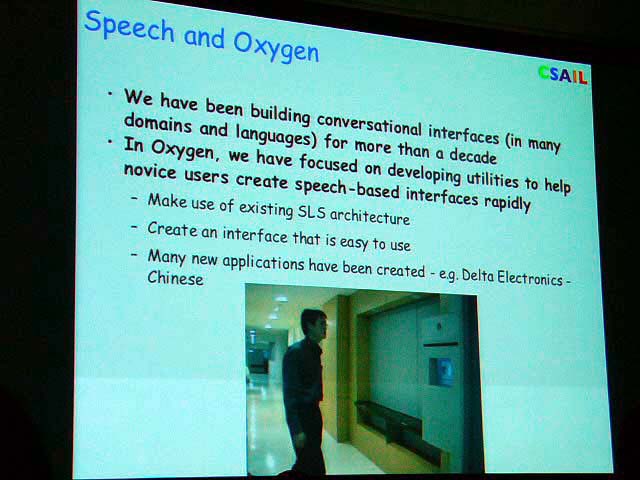
MITがNTTやHP、ノキア、フィリップスなどと進めているオキシジェン・プロジェクトについて、ロドニー・ブルックスが講演した。東大COEとは関係ないが、「酸素のように」計算機によるサービスを提供することを目指すこのプロジェクトは今後のユビキタス社会を考える上で関連が深い。音声認識や画像認識を使って、どんな人でも気軽にanonymousな携帯デバイスを使って建物のOxygenからサービスを提供されることができるとか、スマートな部屋が人間の行動を認識してリアクションを返す、といったデモビデオがいくつか紹介された。
 |
 |
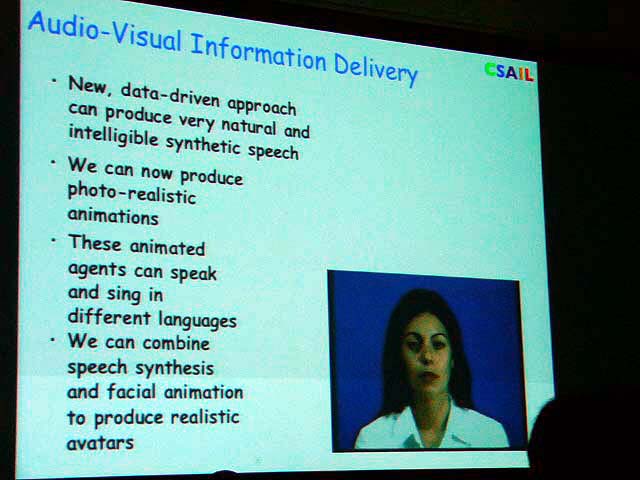 |
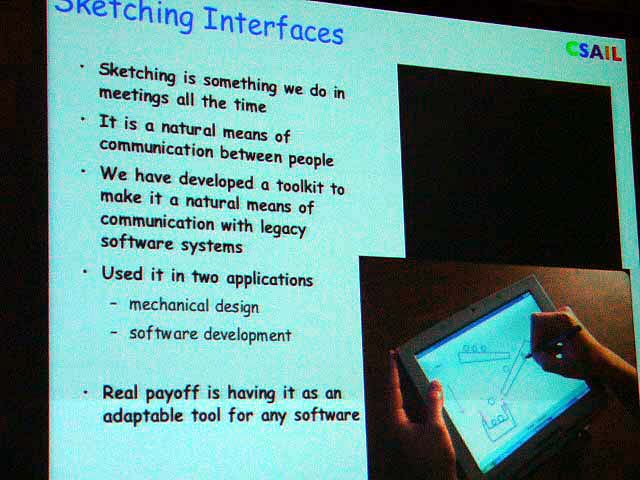
また、簡単なスケッチをするだけでアニメーションを作れる「Sketching Interface」、フォトリアリスティックなアニメーションのエージェントなどもウケていた。エージェントの動きは驚くほど自然に見えた。
【ヒューマン・ロボティクス(HR) 人を支えるロボティクス】
 |
さて、東大COEに話を戻す。ヒューマン・ロボティクスでは、人を支えるロボティクスを掲げる。ロボットといってもヒューマノイドのほかに、空間型や携帯型などのセンサー、そのほかも「ロボット」と捉え、トータルで人間の活動をサポートしようというものだ。佐藤・森研、井上・稲葉・稲邑研、下山・松本・星野研が参加している。
 |
 |
 |
 |
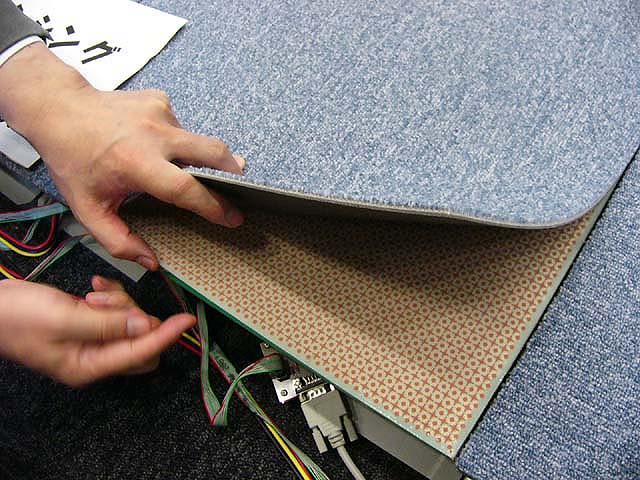
人間の手の動きにあわせて動くコーヒーカップ・ソーサー、ロボティクスライトなどを開発している佐藤・森研究室はロボティックルームの研究で知られる。床には圧力を検知できるセンサーが埋められていて、立ち位置が分かる。センサピッチは7.62mm×7.62mmで、足の形が指まで表示されて面白い。まくって見せてくれているのは佐藤教授。
左の写真はロボティックキッチン。床のセンサで立ち位置・作業位置を検出し、水道の流量を計測することで洗う動作を検出、包丁収納検知、作業面検知で「切る」動作を検出、コンロの電流を計測することで、炒めたり煮たりといった動作を検出する。
 |
 |
 |
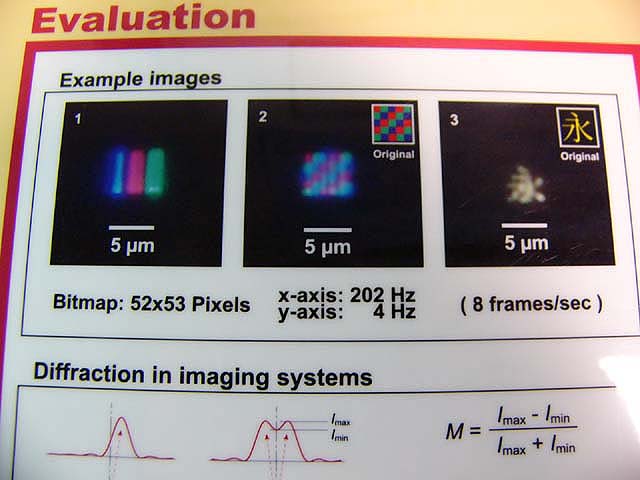 |
| 下山・松本・星野研では5マイクロメートルほどの極小ディスプレイも製作している。52×53ピクセル、毎秒8フレームの書き換えが可能 |
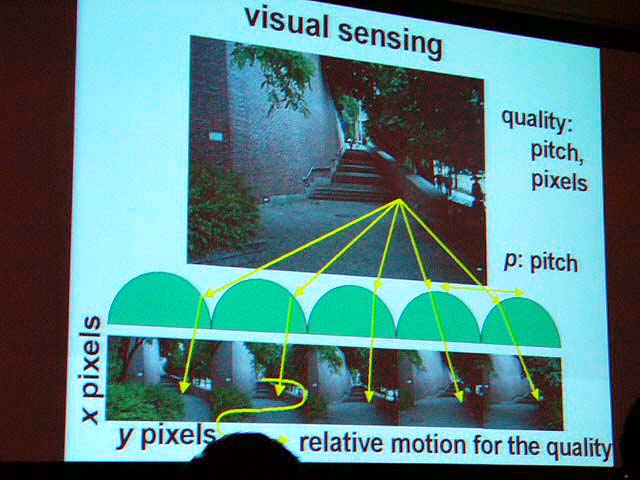
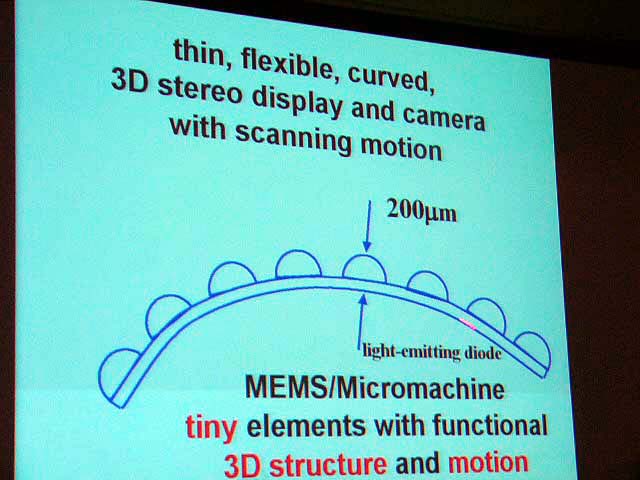
マイクロマシンの研究で知られる下山 勲教授は「ユービキタス・ロボット・デバイス」という演題で講演。2010年以降を目標として「五感対応センサ・ディスプレイの開発」を目指す。マイクロマシンで培った技術で、機能を持った小さくフレキシブルなデバイス、たとえば微小なレンズを並べた3Dディスプレイ兼カメラを作ることができるという。また、コンピュータのインターフェイスとしてのパーソナルアシスタント的ロボットも構想しているそうだ。
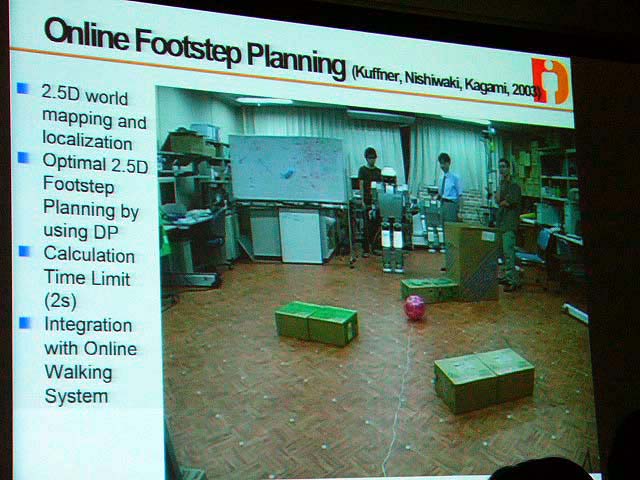 |
H7を使って研究を進める加賀美聡 特任助教授/産業技術総合研究所デジタルヒューマン研究センター 主任研究員は、「全身行動ヒューマノイドの自律性基盤」について講演した。ロボットが実空間で行動するときのモーション・プランニングに関する研究だ。
現在、加賀美氏は人間の歩き方他をモーションキャプチャーや力センサ付きのサンダルなどを使って計測することで、人間の歩き方の特徴を把握、「デジタル・ヒューマン」を作り、それをロボットへ応用することを目指している。たとえば人間は数センチ程度上下に動くことで、左右の揺れを防いでいることなどが分かったという。ヒトの動きを力学的にコンピュータのなかで再現したいそうだ。
 |
 |
 |
稲葉研はリモートブレインのロボットや全身腱駆動のロボット「腱太」などで知られるが、HRP-2も購入されている。「コンピュータの保守」という名目の予算で購入したもので、学生が使うことになるという。すごい時代が来たものだ。写真で向こうに見えているのはH6。
 |
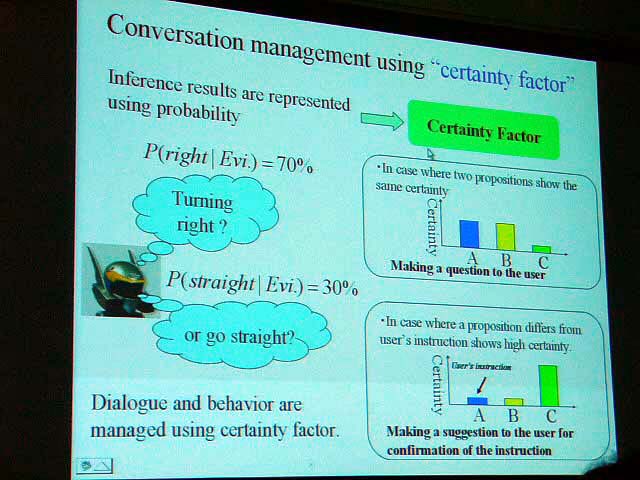 |
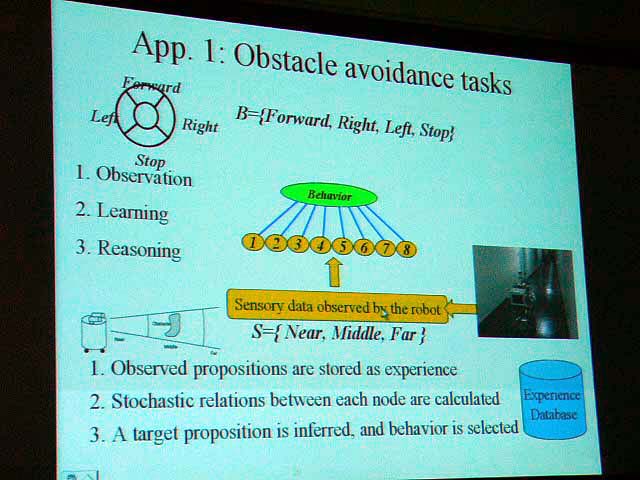
そして稲邑哲也講師は「共有経験に基づくヒューマン・ロボット・インタラクション」という研究について講演。ベイジアン(Bayesian)・ネットワークという手法を使ってロボットのアプリケーションを作ろうとしているという。ロボットはベイジアンネットワークを使うことで、経験ノードを参照しながら、それぞれのノードが他のノードとどのような関係を持っているか学習していく。ベイジアンネットワークは、不確定な実世界での、フレキシブルな決定に適しているという。
 |
その実験に用いられるHRP-2は足のことを心配したくないということで“ガンタンク”のような状態に。自分でレバーを握って下の台車を動かして移動する。工事で接続することも可能だったが、面倒だし、ヒューマノイドなんだから自分で動かしてもいいじゃないかということで、こういう形になったとのこと。
実は台車と胴体との接続部分は場所に応じて伸ばすこともでき、身長は140cmから170cmまで可変。HRP-2は軽量が売りだったが、これは140kgもある。画像認識は産総研の3眼による認識システム「VVV(本連載第一回参照 )」ではなく、井上・稲葉研のシステムを採用。2眼のモノクロカメラと1眼のカラーカメラを搭載している。
【アテンティブ・エンバイロンメント(AE) 人に配慮する環境】
「アテンティブ(Attentive)」とは聞き慣れない言葉だが、辞書を引くと「注意深い、勤聴する、思いやりがある」といった意味だとある。つまり気が利くが、必要ないときは存在を感じさせないような存在、そばで主人を見守りつつ用があれば主人が呼ぶ前に用件を察する、執事あるいはレストランのウェイターのような環境が「アテンティブ・エンバイロンメント(AE)」だと考えればいいのだろう。
このセッションの背景には、製造業を取り巻く厳しい背景がある。単一大量生産に向いていたライン生産全盛の時代は徐々に終わりつつある。多品種少数に向くセル生産、すなわち一人の作業者が多工程を担当する生産手法が注目されつつある。AEはそれをロボティクスとセンサ技術でサポートすることを当座の目標として研究開発が進められる。つまりユビキタス系でしばしば見かける家庭や町中ではなく、工場での実現を目指すものだ。ポイントは、人を代行する「自動化」ではなく、作業者に「手を差し伸べる」ことにあるという。作業者の高齢化などへの対応も課題だ。
 |
 |
 |
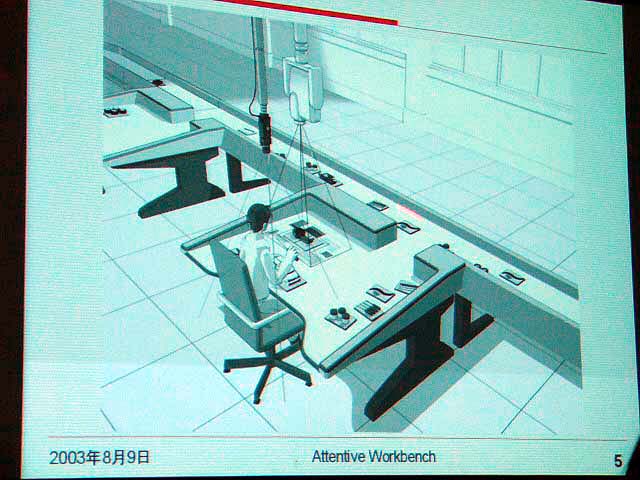
| 鈴木宏正教授が概要を述べた「Attentive Work Bench (AWB)」はAEのありようの1つだ。バイタルセンサ、ビジョンセンサ、部品タグなどで人間や部品の場所や意図を認識、モーショントレイやマニピュレータで人間をサポートする。腕を伸ばすと自動的に適切な部品を運ぶトレイが手元に寄ってくるといったものだ | 高増・高橋研の動くトレイ。空気のホバーで移動している。無線化するための研究にこの秋から入るそうだ。将来は動くトレイが部品を載せて手元まで勝手に動いてきてくれるようになるのだろうか | 赤外線で人間の手の動きをトラックする机「Enhanced Desk」。手の場所を机が認識して、そこにプロジェクタで投影されたオブジェクトが寄ってくる。将来的には、赤外線以外のカメラも使って認識制度を上げると同時に、実物の動くトレイを使いたいという |
小谷 潔・東京大学 特任助手は「バイタルセンサで何が分かるか」という講演を行なった。バイタルセンサとは心拍・呼吸・血圧・体温など生体情報(バイタル)を取るためのセンサで、AWBの研究では、バイタルを測ることで操作者の疲労度やストレスなど人間の内部情報を取り、AWBをそれに応じて適切に応答させるのだという。
最後に株式会社デンソーウェーブの日比均 執行役員が、製造分野での自動化の取り組みについて、現場からの意見を述べた。ロボットのシステムアップに多大な費用がかかっていることや、ティーチングの手間・コストに関する話題など、研究者の多くには新鮮に感じられたようだ。具体的にはシステムアップ費用が600億円に対して、ロボットそのものは20億円程度であり、圧倒的にシステム側に費用がかかる。そのため製造分野現場では、ロボット自身がシステムアップ・システム変更する機能が切実に求められているという。
【ユーザー・コンテキストの把握】
全体を通してみると、共通した課題は「人間」であることが分かる。人間を中心とした新しいコンピューティングを想定すると、人間のごく自然なアクションや自然な会話のままで計算機パワーを使える、ということが前提となる。そのためには人間の使う身振りや言葉を認識し、人間がいま何をしたいと思っているのか把握できなければならない。
ユビキタス系のアプリケーションでは、ユーザーの文脈を把握することが要となる。要素技術を進展させるか、あるいは限られた技術だが運用でうまくやるか。どのように発展していくのか、いずれにしろ楽しみだ。
□21世紀COE 情報科学技術戦略コア
http://www.kc.t.u-tokyo.ac.jp/COE/index-j.html
(2003年9月29日)
[Reported by 森山和道]
【PC Watchホームページ】
PC Watch編集部 pc-watch-info@impress.co.jp 個別にご回答することはいたしかねます。
Copyright (c) 2003 Impress Corporation All rights reserved.