
|
千葉工業大学、人を乗せてデコボコ道を踏破する「チャリべぇ」
~車輪と4脚のハイブリッドロボット
 |
5月16日発表
5月16日、千葉工業大学にて、人間が搭乗可能なハイブリッド型不整地移動ロボット「チャリべえ」の公開デモンストレーションが行なわれた。
「チャリべえ」は車輪と脚のハイブリッド移動機構を使い、凹凸や傾斜のある自然地形・不整地を踏破することを目的として開発されたロボット。傾斜地や草や岩などのある屋外での作業を目的とする。平地では車輪で高速移動し、不整地では脚と、脚先部分に取り付けられた車輪、そして胴体部分の車輪を協調して使う「脚車輪モード」で移動する。車輪と脚で過重を分担することで、本体重量300kgながら、さらに人間を乗せて歩行することにも成功した。
最大の特徴は、映像やレーダー、力センサーの類など「外界センサー」を使っていないこと。関節角度を取るためのロータリーエンコーダーや姿勢センサーなどロボット自身の内部情報をとる「内界センサー」の情報のみを使って足を運ぶことで、未知の場所でも歩ける行動制御アルゴリズムを開発した。
ロボット自身の姿勢角度と各関節軸のエンコーダー(角度センサー)から、適切な歩行パターンを出す。いわば各脚を昆虫の「触角」のように使い、接地した時点でその場所の地形を推定し、歩き方を決定するのだという。
 |
| 中野栄二 千葉工業大学総合研究所教授(左)と、中嶋秀朗氏(千葉工業大学未来ロボット技術研究センター研究員) |
東北大学、千葉工業大学、株式会社ジェー・シー・イーが協力して、中野栄二 千葉工業大学総合研究所教授(前職・東北大学大学院情報科学研究科教授)と中嶋秀朗氏(千葉工業大学未来ロボット技術研究センター研究員)らが開発した。
「チャリべえ」は中野教授らによる東北大学での「チャリオット」1~3号機の研究成果をふまえて開発されたもの。今回、NEDOとの共同研究で「愛・地球博」ロボット週間でのデモ展示用に、人間が乗り込むことを前提とし、安全性などを考慮して設計し直した。
中野教授によれば、実際の自然環境ではエラー情報を送ってしまうことも多い外界センサーに頼らないため、人間が搭乗できるだけの高い信頼性、安全性を実現できたという。
デモの様子を動画と写真でレポートする。
 |
 |
 |
| 【動画】脚を出して立ち上がるチャリべえ1号機 | 【動画】不整地を歩く様子。右側は障害物ばかりだが、なんなく歩いていく | 【動画】平地では車輪モードに変形して移動 |
 |
 |
 |
| 【動画】女性を乗せて歩行するチャリべえ2号機。モータ出力は200Wあるいは300W | 【動画】同じく2号機。チャリべえ1号機はおよそ300kg、2号機は270kgある。30kgの重量差は発電器の有無 | 【動画】操縦は外から。操縦者は前進後進、回転の指令、あとは変形の指令を与えているだけで、足運びはロボット自身が判断している |
 |
 |
| 【動画】不整地移動を俯瞰 | 【動画】平地移動を正面から |
 |
 |
| 【動画】平地を車輪で移動したあと、脚を出す | 【動画】脚と胴体部分の車輪を使って段差を乗り越える。およそ20度程度の角度の坂であれば登っていけるだけの登坂性能を持つという |
 |
 |
 |
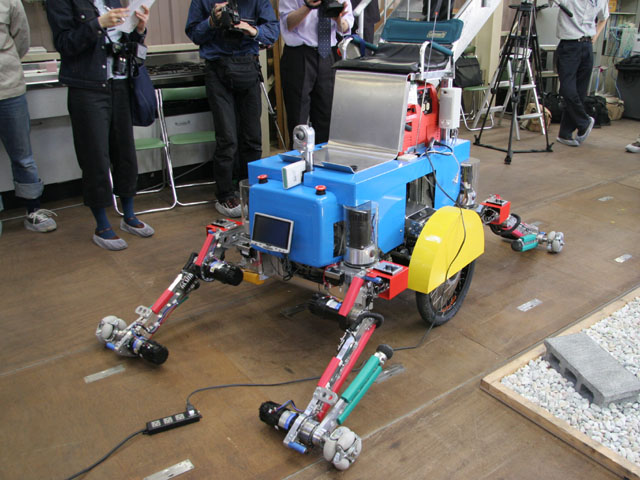
| チャリべえ1号側面 | チャリべえ2号。遠隔操作用にネットワークカメラなども装備している | チャリべえ以前に東北大学で研究開発されていた「チャリオット3」 |
 |
 |
 |
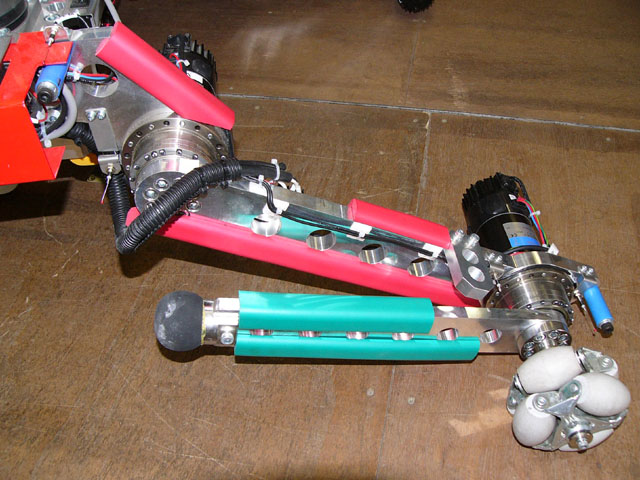
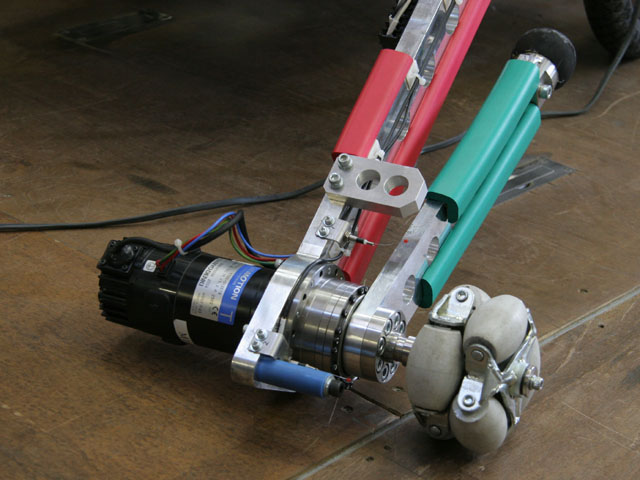
| 脚部。肘に相当する部分にオムニホイールがついている | 走行モード時の姿勢 | |
 |
 |
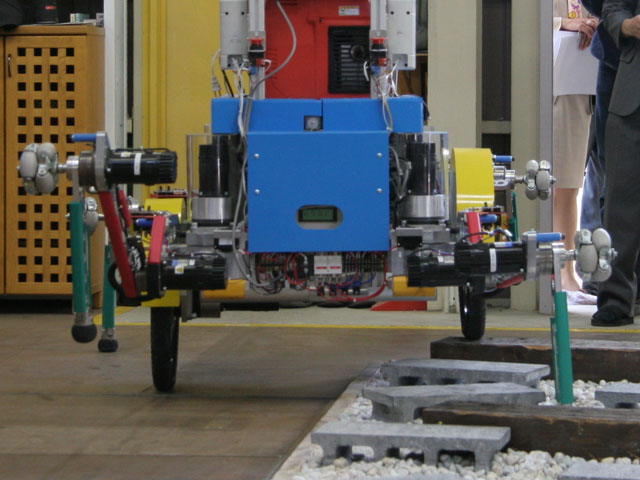 |
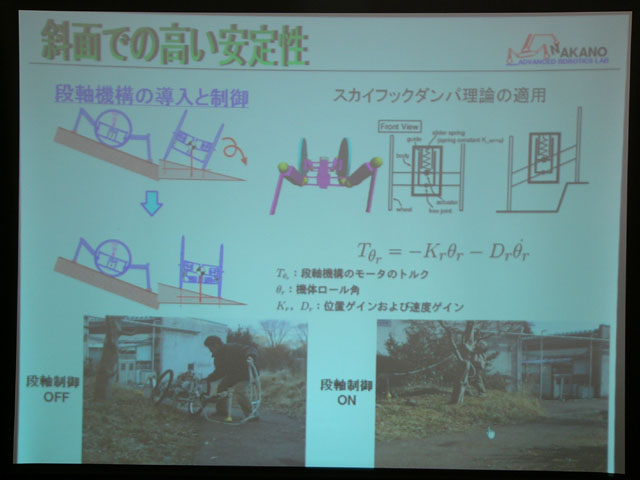
| 中央のホイール部分 | 段軸機構と呼ばれる機能とその制御によって、斜面でも安定した姿勢が保てるようになっている | |
チャリべえは6月9日~6月19日まで「愛・地球博(愛知万博)」にて開催されるNEDOプロトタイプロボット展でデモ展示される予定。中野教授、中嶋研究員らは、今後、外界センサーとの組み合わせによる、より安全で信頼性の高い移動プラットフォーム化や、大型化・小型化それぞれの可能性等を探っていくという。
□千葉工業大学 未来ロボット技術研究センター(fuRo)
http://www.furo.org/
□関連記事
【3月23日】【地球博】恐竜ロボットや掃除ロボットなどが展示
http://pc.watch.impress.co.jp/docs/2005/0323/expo05.htm
(2005年5月17日)
[Reported by 森山和道]
【PC Watchホームページ】
PC Watch編集部 pc-watch-info@impress.co.jp お問い合わせに対して、個別にご回答はいたしません。
Copyright (c) 2005 Impress Corporation, an Impress Group company.All rights reserved.