 |


■森山和道の「ヒトと機械の境界面」■人を飽きさせないロボットをつくる
|
 |
4月8日、ソニー・インテリジェンス・ダイナミクス研究所株式会社は「インテリジェンス・ダイナミクス2005」と題したシンポジウムを実施した。同研究所は2004年7月に設立されたソニーの100%子会社だ。
「インテリジェンス・ダイナミクス(動的知能学)」という言葉は同研究所による造語だ。機械が自らのセンサー・モーター系を通してインテリジェンスを創発するためにはどのような原理モデル(インテリジェンス・モデル)が必要なのかを追求することを目的としている。
平たく言えば人工知能だが、既存の人工知能研究とは少し違い、ネットワークやロボットなどが自分自身の身体を通じてどのように知能を創発させるか、というところにポイントが置かれている。また、脳科学などの研究にも着目している点も特徴だ。
昨年夏にも「インテリジェント・ダイナミクス2004 -脳・身体性・ロボット・知性の創発- 」と題されたシンポジウムが実施されている。会場には多くのロボット関係者や認知発達ロボディクスの研究者が訪れ、大盛況となった。今年は昨年ほどではなかったが、やはり大勢の人々が詰めかけ、熱心に聴講していた。
直球的人選だった前回に対し、今回のシンポジウムではスピーカーとして、同研究所の研究員2人による発表、脳の報酬系についてロボットを使って研究している銅谷賢治氏(沖縄大学院大学 先行的研究事業 神経計算ユニット代表研究者、ATR脳科学研究所 計算神経生物学研究室 室長)、身体性に基づいたロボット認知や運動生成の発達の研究を行なう國吉康夫氏(東京大学大学院 情報学環 教授)のほか、小脳の研究を行ない日本の脳科学の大御所として知られる伊藤正男氏(独立行政法人 理化学研究所・脳科学総合研究センター特別顧問)、言語の起源に関する研究を行なっている正高信男氏(京都大学霊長類研究所・行動神経研究部門 認知学習分野 教授)らが迎えられた。より人間あるいは動物の脳の機能に関する研究との融合を志向したものとなっている。
直接、PCには関係ないし、読者諸氏にはかなり遠い話に感じられるかもしれない。だがもし、本質的な意味で脳に似た機械知能が実現すれば、産業界だけではなく世の中に与える影響は計り知れない。インテリジェンス・ダイナミクス研究所は、かなり遠大な目標に、正面切って取り組もうとしているのである。今回は、このシンポジウムをレポートする。
●「インテリジェンス・ダイナミクス(動的知能学)」とは?
聞き慣れない言葉なので、もう一度、復習しておこう。「インテリジェンス・ダイナミクス(動的知能学)」とはなんだろうか。
ソニー・インテリジェンス・ダイナミクス研究所の土井利忠所長によると、「インテリジェンス・ダイナミクス(動的知能学)」とは、知能の創発には自分自身の身体を含む環境との相互作用や発達の観点が重要であるとする「認知発達ロボティクス」と、脳を理解するためにはモデルを構築し、それをもとに実際に作ってみるべきだとする「構成論的アプローチ」、この2つの方向性をひとまとめにして捉えようとする造語であるとしている。
現在、古典的なAI研究は、行き詰まっている。当分、動物の脳が実現しているような知能は実現しそうにない。人間や動物は経験を通じて知能を獲得していく。柔軟に学習の結果を反映する基本アーキテクチャーが脳にはある。そのメカニズムはどうなっているのだろうか。
では、インテリジェンス・ダイナミクスは何を目指すのか。「新しい機械知能」の実現である。同研究所シニアリサーチャーの下村秀樹氏は方向性を3つ挙げた。1)脳科学や認知科学、ロボティクスと融合し、従来のAI技術……記号処理や作り込みなどからの脱却。2)センサー・モーター系を通した環境とのインタラクションによる創発。そして、3)機械と人間との自然なインターフェイスの実現である。
単にロボットだけに限定されるものではなく、人と触れあったり、外界を認識する機械全体に適用できる汎用技術であり、そして、人間と長時間ふれあっても飽きさせないものを目指しているという。
 |
 |
| 土井利忠所長 | シニアリサーチャー下村秀樹氏 |
具体的にはどんなアプローチで迫ればいいのだろうか。土井氏は「構造化された時系列的記憶の獲得」、そして「獲得された記憶への新規体験の引き込み」が重要なのではないかと語った。「センサー入力と予測がお互い引き込みあって、場合によっては認識、場合によっては行動として発現する」というメカニズムが重要なのではないかとする。
そしてその「記憶」は、現在のコンピュータのメモリのようなものではなく「頑健性と可塑性」、2つの相反する性質を兼ね備えていなければならないとする。つまり、以前の記憶が簡単に壊れてしまっては困るのだが、ある予測誤差の範囲を超えると変化する。その分岐はどこでどのように起きるのか。その設計が最大の問題であると語った。
知覚と運動生成との間の深い関係や身体あるいは身体表象の重要性が議論されるようになって久しい。また感覚種を問わない情報表現、記憶の概念化と圧縮、抽象化と般化、その記憶に基づく予測や動機づけモデル、そしてその階層化、それが知能の発露のためには重要なのではないかといった考え方は、同研究所のなかだけではなく、インテリジェンス・ダイナミクスが守備範囲としている、計算論的神経科学、構成論的脳科学、身体性認知科学、認知発達ロボティクス等の研究者の間で共通認識になりつつある。
今回、同研究所はこのような考え方(=インテリジェンス・ダイナミクス)に基づき、理研 脳科学総合研究センター 脳型計算論研究グループ 動的認知行動研究チームの谷 淳氏らが提唱するRNNPB(Recurrent Neural Netowork with Parametric Bias:昨年の記事あるいは理研ニュースによる解説を参照)を使った知能モデルや、階層化された予測器・制御器ネットワークを使って未来を推定する知能モデル「MINDY(ミンディ)」などを提案し、二足歩行ロボット「QRIO」を使ったデモンストレーションで発表した。
●デモンストレーション
ソニーがインテリジェンス・ダイナミクスの研究を始めた背景には、もともとAIBOやQRIOの開発を通して既存の作り込み手法や終わりのあるシナリオの限界、想定外・未知環境対応へのロバストネスの欠如、そして「人間を飽きさせないことの難しさ」を感じたことがあるという。そこで全く新しいロボティクス、あるいは機会知能実現の可能性を基礎研究に求めたわけだ。土井氏は、5年後を目処に新しいロボットを作りたいと語った。
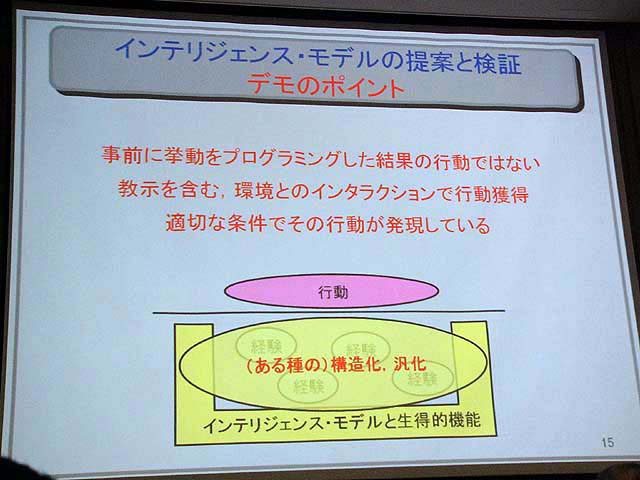
デモンストレーションでは、その取り組みの一端が紹介されたのだが、まず講演でデモの背景にある基本的な考え方が説明された。デモを見せるたびに「(意義が)分かりにくい」と言われるのだという。インテリジェンス・ダイナミクス的な考え方は、研究者の間でもまだ1つにまとまっていないものなので、無理もない。講演では、主として、人を飽きさせないためにはどのような知能モデルが必要なのか、という観点で説明された。
 |
 |
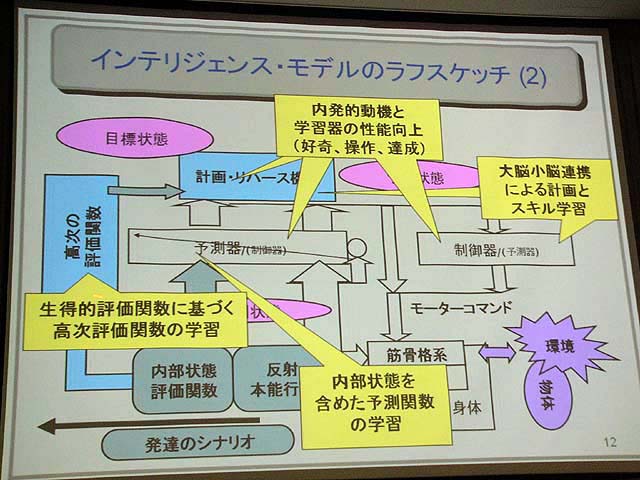 |
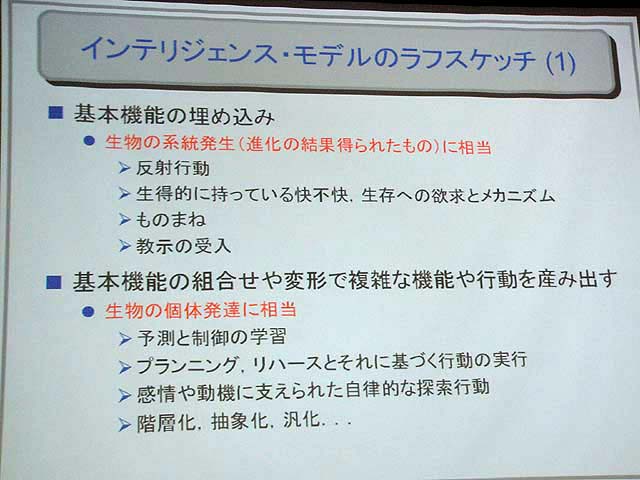
| 飽きないエージェントにとって大切なこと | 飽きないエージェントが備えているべきインテリジェンスモデルのラフスケッチ。基本機能とその組み合わせ、変形操作が重要 | |
 |
 |
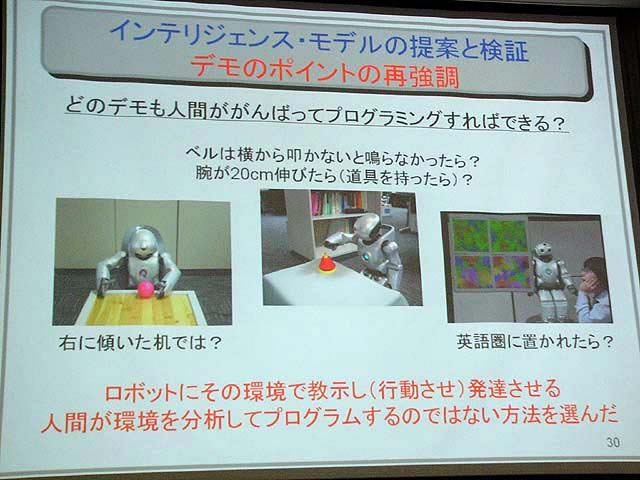 |
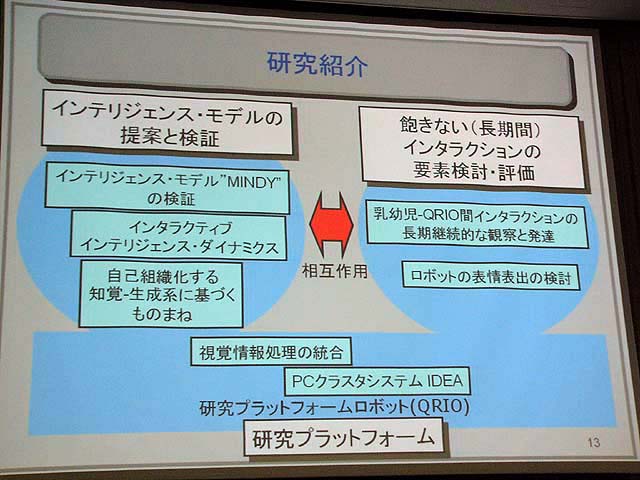
| 研究とデモの関係 | 事前の作り込みだけではない、インタラクションからの行動発現がデモ全体のポイントだという | 作り込みでも実現できるという批判に対する反論。どんな環境であっても、その環境で行動させ発達させる手法を選んでいる点が違うと強調 |
さて、実際のデモンストレーションの説明に移る。まずPC Watch読者にもっとも取っつきがいいと思われるのは、「PCクラスタシステムIDEA」だ。
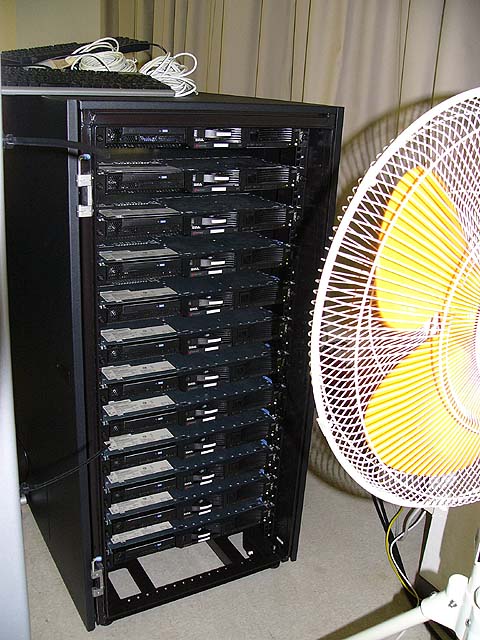
IDEAは2004年9月に稼動しはじめたPCクラスタだ。eServer325という計算ノードによって構成されており、CPU数は352。ピーク性能は1.5488Tflopsで、スパコンランキングとして知られるTOP500で319位にランキングされている。
IDEAはニューラルネットワークや画像認識、統計的学習など大きな計算パワーを使うタスクを行なう。IDEAを使えば従来の1/100以下の時間でオフライン実験を行なうことができるという。
このIDEAをQRIOと繋げる研究も行なわれている。QRIOの頭脳(リモートブレイン)としてIDEAを使うのだ。これまでQRIOのボディ内ではリアルタイムに実行不可能だった計算を行うことができるようになる。
今回は10クラスタ分だけを使って、画像認識を行なうデモが行なわれた。複数の画像認識モジュールを同時に並列で走らせ、それを統合して環境認識を行なう(並列ビジョンライブラリ)。各処理モジュールはAIBOやQRIOに搭載されているOPEN-Rアーキテクチャに基づいており、1つのオブジェクト内で、任意の数のCPUを使用できるという。デモでは、まず1つのモジュールを1つのCPUだけで動かしたあとに、10CPUを使って1モジュールを動かす様子が披露された。
 |
 |
| IDEAを構成するPCクラスタ。扇風機で冷却 | 画像認識の結果を出すディスプレイ。左上から線分検出、色、ステレオ計測。そして左下から色分割、視覚的注意、オプティカルフロー。そのほか、顔検出や局所特徴量検出などを組み合わせる |
 |
 |
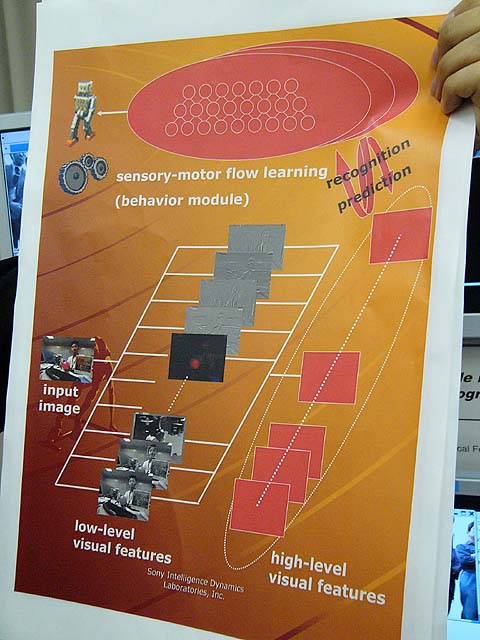
| 並列ビジョンライブラリ概念図 | デモで用いられていたカメラ。モーターはQRIOに用いられているISAというサーボが使われている |
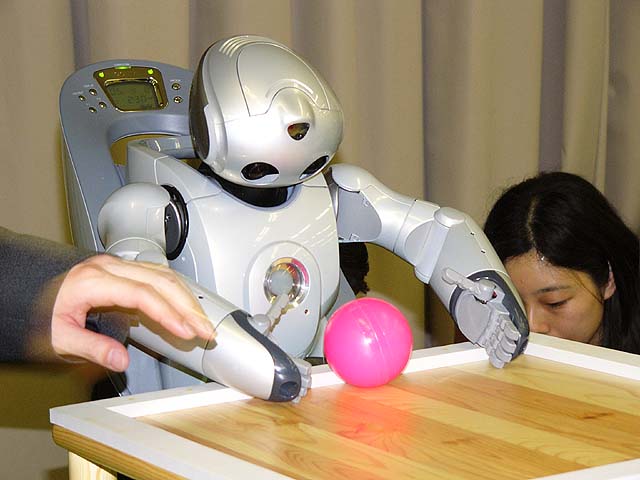
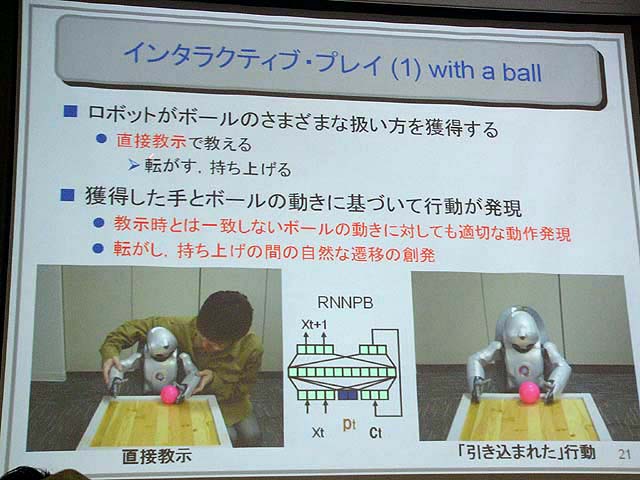
「インタラクティブ・インテリジェンス・ダイナミクス インタラクティブ・プレイ」は、理研の谷 淳氏らとの共同研究の成果。力学的メカニズムによる教示からの行動獲得、そして複数行動間の動的な切り替えの様子が、ボール転がしと持ち上げ、そして積み木操作でデモされた。
PBニューロン+再帰的ニューラルネットワーク(RNNPB)と呼ばれるモデルを使ったもので、まず人間がQRIOの腕を持って、両手を使ったボール転がし、そしてボール持ち上げを教える。QRIOはそれを自らのセンサ入力+モータコマンド出力として覚える。すると、教示した時とは違う軌道をとってボールが転がっても、QRIOは適切な動作を出力するようになる。それだけではなく、ボールを転がしているときに、たまたまボールと自分の腕が持ち上げ動作と近い状態になったら、動作を遷移させて持ち上げ動作を自発的に行なう。ボールの位置だけではなく、自分自身の関節角指令値、現在値もニューラルネットワークへの入力としている。
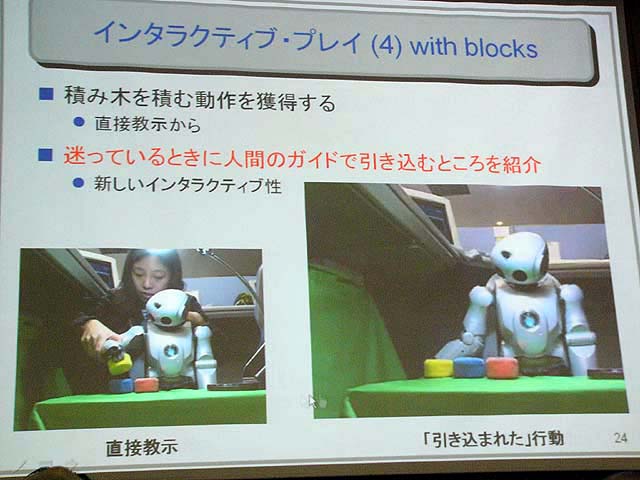
積み木の例も基本的に同様で、人間が積み木を積むことを直接教示したあとに、QRIOに自発的に積み木を積ませる。その後、QRIOがどれを持ち上げるべきか迷っているときに人間がちょっとガイドしてやると、そちらに動作出力が「引き込まれる」というものだ。
ロボット自身の記憶構造内部のダイナミクスが、もともとそういう風になっているのだ。作り込みではなく、動的な環境と相互作用するために、ロボット自身の記憶をどのように構造化させるべきかという研究の1つである。
 |
 |
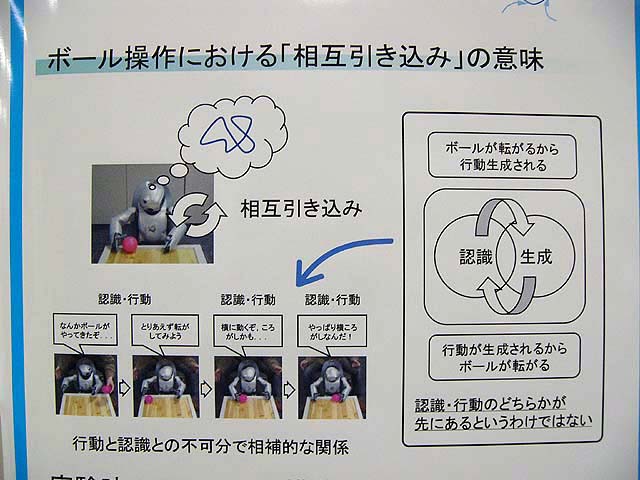 |
| インタラクティブ・プレイ | インタラクティブ・プレイ。こちらば積み木 | 認識と行動生成は不可分の関係にある |
 |
 |
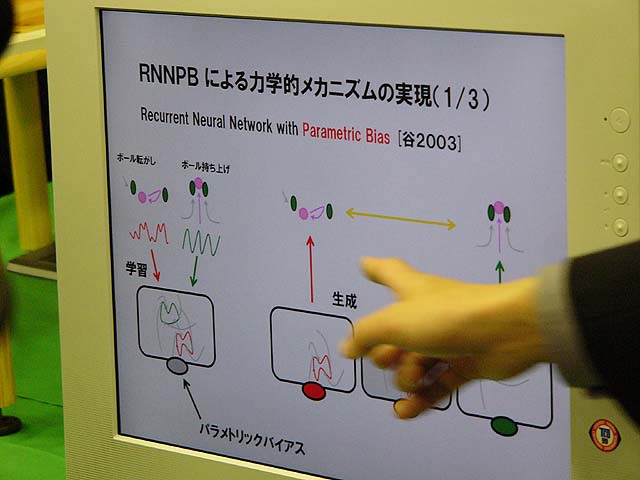
| RNNPBによる力学的メカニズム。転がしと持ち上げのニューラルネットワークをパラメトリックバイアス(PB)が繋いでいる | QRIOに動作を教示する |
 |
 |
| 【動画】ボールを転がしながら、持ち上げたりするQRIO | 積み木のデモの様子 |
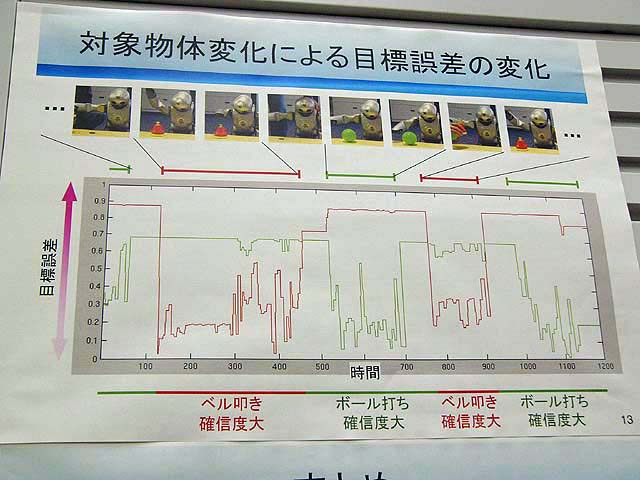
検討されている知能モデルはRNNPBだけではない。同研究所オリジナルのインテリジェンスモデルが「MINDY(Model of Intelligence Dynamics。またはMind based on Bodyの略だという)」だ。予測器・制御器の組を基本モジュールとし階層化させたネットワークで構成されている。各モジュールは同時並行で学習・動作し、予測器と制御器は未来を予測し、その「確信度」でロボットは動作を選択する。環境との相互作用を通じて経験や教示で学び、成長していくエージェントを実現するための知能モデルだ。
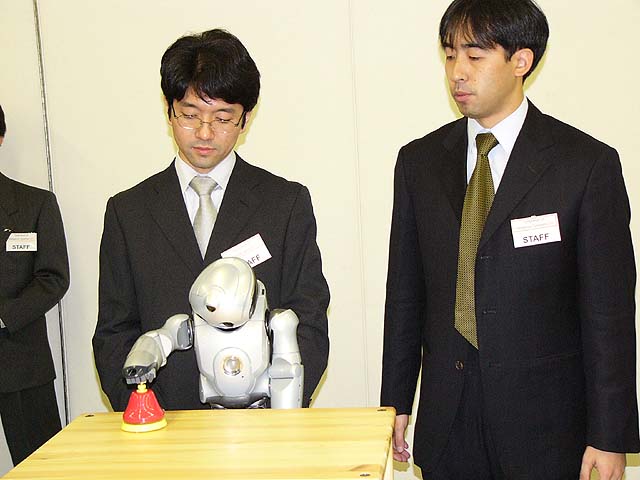
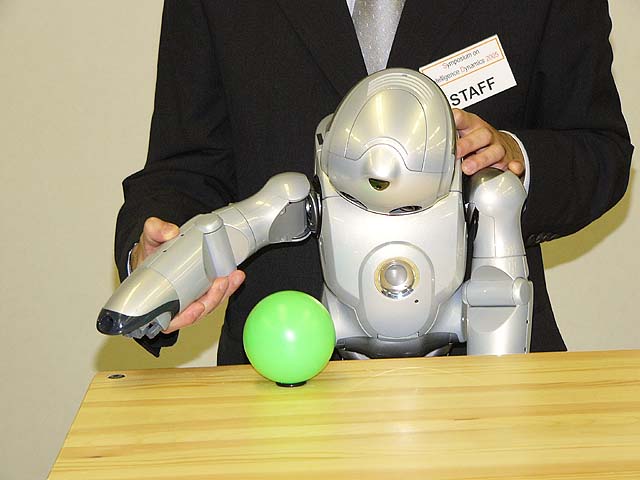
デモでは、ベルは鳴るものであり、そしてボールは転がるものであるといった物体に働きかけたときの変化に関する特徴的な知識を、動作教示とQRIO自身による観測によって与え、見せられた物体に応じて行動を変える様子が披露された。なお、ベルが鳴ること、あるいはボールが転がることは「面白いこと」だとQRIOには事前に教えてある。
 |
 |
 |
| ベルを叩くQRIO | 場所を変えたり色を変えてもベルならば叩こうとする | ベルならばとにかく叩こうとする |
 |
 |
 |
| ボールを転がす動作を教えるところ | 【動画】ベルを叩くQRIO | 【動画】ボールを転がすQRIO |
 |
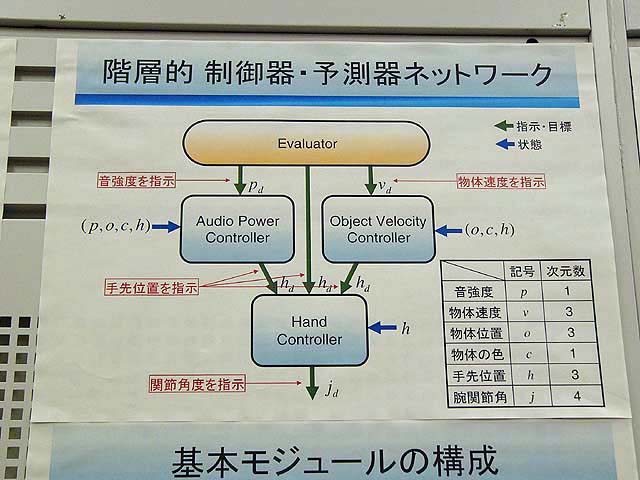 |
| QRIOの内部状態。対象物体によってベル叩きとボール転がしの「確信度」を変化させる | 「MINDY」の階層的 制御器・予測器ネットワークの構成 |
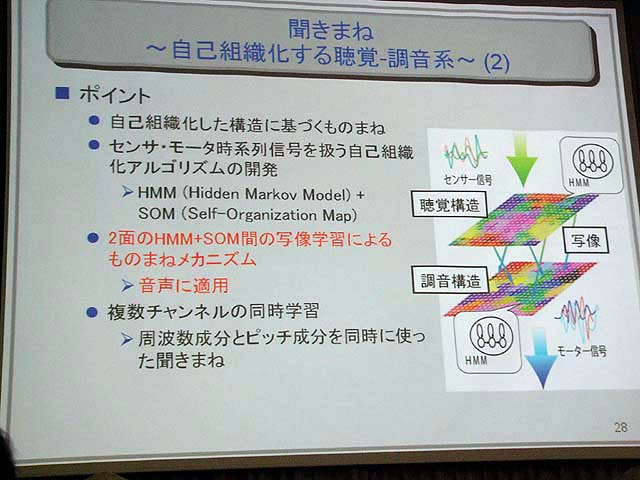
知能の話といえば必ず出てくるのが模倣、ものまねだ。人間の赤ん坊も自分なりの声や動きで物まねすることで環境や自分自身の身体に関する知識を学んでいく。まさに認知と行動の相互作用だ。今回のデモでは「自己組織化する知覚-生成系に基づくものまね」として聞きまねのデモが披露された。
QRIOに声を聞かせ、その声に似た声を出力させるというものだ。動画をご覧いただきたい。
 |
 |
| 【動画1】【動画2】「うー」と物まねして発話するQRIO。意外なほど似た声が出ているのが分かる。人間には音声出力においても生物学的構造による制約があるので、そういった条件を入れればもっと似るかもしれない | |
 |
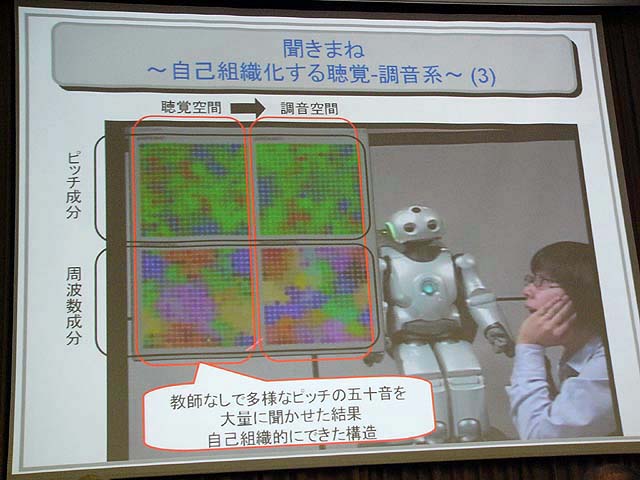 |
 |
| 隠れマルコフモデル(HMM)と自己組織化マップ(SOM)を貼り付けたモデルで学習させて物まねをさせている | なおこのデモで使われていたQRIOには、まぶたと口が取り付けられている。表情表出の検討用だ | |
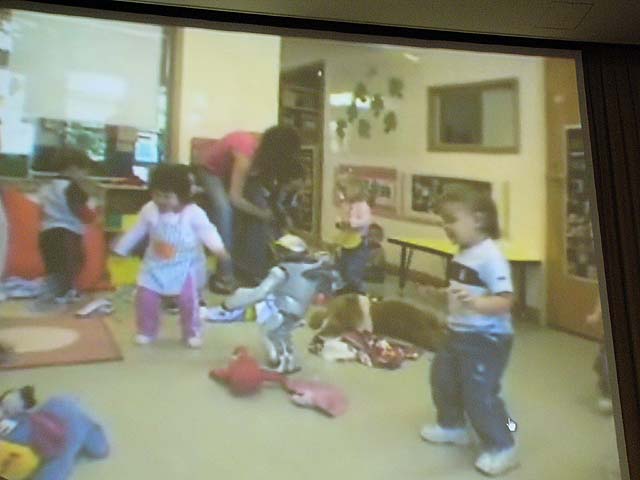
最後の研究紹介は、他のデモとは少し毛色が違っている。ソニーでは人と長く暮らすロボットを最終目標としている。そのためには人に飽きられないものである必要がある。そのためQRIOを数カ月間、保育園で2歳未満の乳幼児と一緒の環境においてみているのだ。QRIOは乳幼児の1人として扱われる。その過程で、QRIOがどのように受け容れられていくかみようというものだ。
実験は2005年3月から始まり、発表では20日後の監察報告が行なわれた。担当リサーチャーの田中文英氏によれば、QRIOは至って普通に仲間として受け容れられているが、子供たちは「ちょっと変な奴」としてQRIOを見ているようだという。なお田中氏はこの研究準備のために保父さん見習いを4カ月間行なったそうだ。
 |
 |
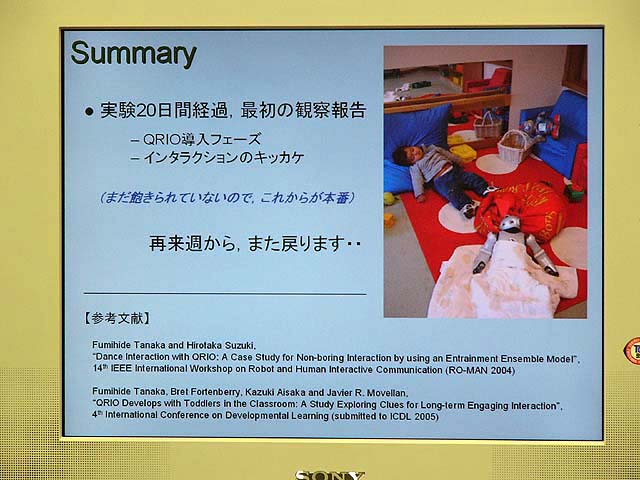 |
| 保育園での様子 | 田中文英リサーチャー田中文英リサーチャー | 実験はこれからが本番だという |
●講演
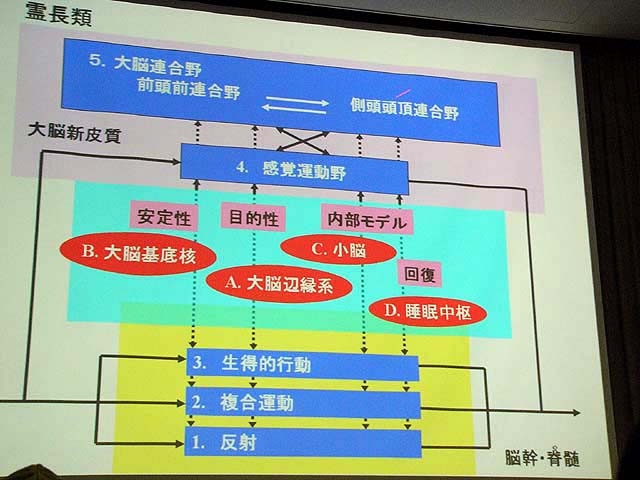
講演についても簡単にふれておく。理研脳科学総合研究センター特別顧問の伊藤正男氏は、「脳の中に何があるのか」と題して、人間の脳の構成や、それを探るための現在の脳科学のアプローチ、そして小脳にあると考えられている内部モデルなどについて講演した。
 |
 |
| 伊藤正男氏 | 脳の構成 |
 |
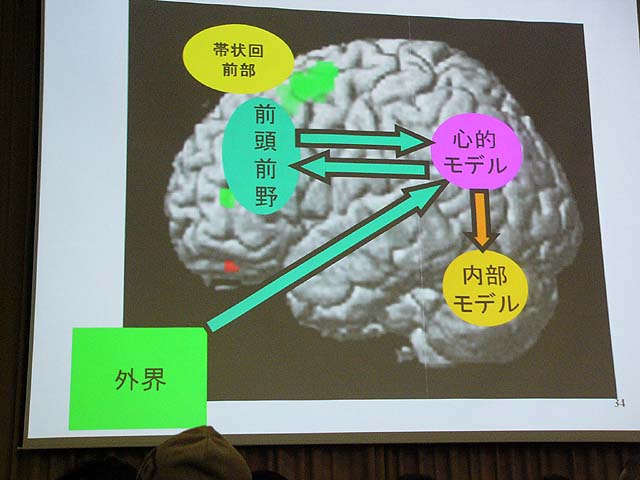 |
| 小脳の神経回路 | 脳の機能。小脳に内部モデルができると、意識的に考えなくても体を動かしたりできるようになる |
京都大学霊長類研究所・行動神経研究部門 認知学習分野の正高信男氏は「言語起源論再考」として講演した。この研究領域では、通称・文法遺伝子として知られる「FOXP2」という第7染色体長腕部から発見された難読症原因遺伝子の話が非常にホットだとして、その話と脳のブローカ野、そしてミラーニューロンとの関係に関する自身の実験について紹介した。
ミラーニューロンは自分自身の行動を起こすときにも他人の行動を見たときにも発火するニューロンであり、他者の行為を理解するために自分自身の行なう運動パターンをもとにして理解することを示唆すると考えられている。それが言語習得においても重要な役割と果たしているのではないかという見方を、アスペルガー症候群と健常人との比較研究などを紹介しつつ述べた。
また、ヒトの言語以前のコミュニケーションを探る1つとして、テナガザルのデュエットと、その種間変異について紹介した(詳しい話を知りたい方は正高氏自身のサイトにあるテキストを参照されたい)。
 |
 |
 |
| 正高信男氏 | ミラーニューロンによって構成されるミラーシステムの活動を見るための視覚刺激 | ミラーシステムは、メンタルローテーション(心的回転)、つまり自分自身の身体に他者の行動をなぞらえさせるような課題で活動するという |
銅谷賢治氏(沖縄大学院大学 先行的研究事業 神経計算ユニット代表研究者、ATR脳科学研究所 計算神経生物学研究室 室長)は「学習するロボットと脳の報酬系のデザイン」と題し、「脳をつくる」ことで脳を理解しようとする試みについて講演した。
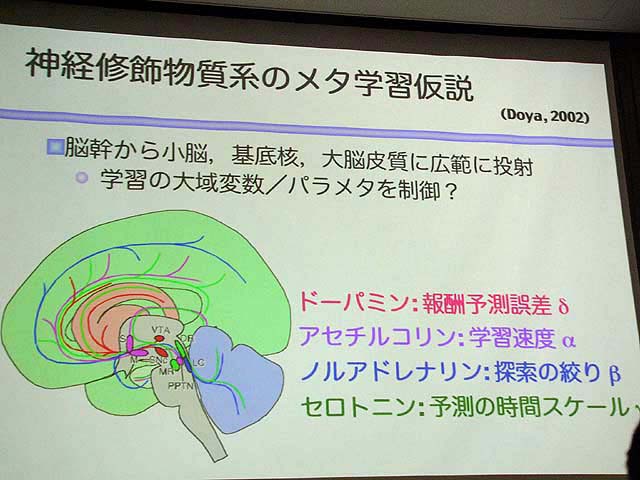
ロボットを使った報酬系の実験について紹介したあと、神経伝達物質がさまざまなパラメータを制御している可能性や、脳には線条体下部と上部を通るループがあり、それがそれぞれ短期と長期の報酬予測をしているのではないかとする説と現在の実験について紹介した。
 |
 |
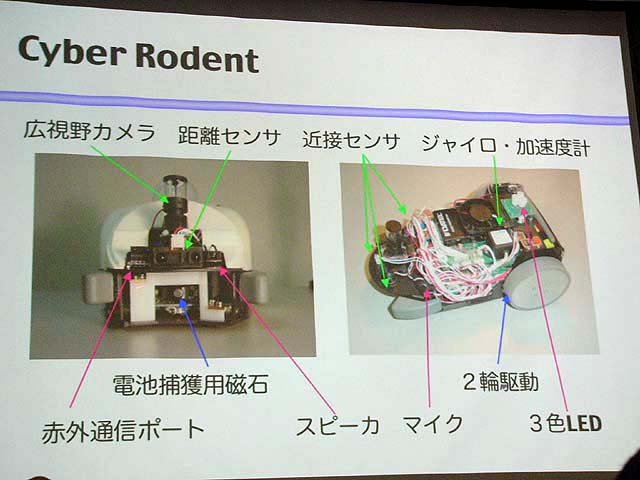 |
| 銅谷賢治氏 | 銅谷氏の考える脳のメカニズム。皮質、基底核、小脳それぞれが違うモデルを持って協調する | 実験に使われるロボット |
 |
 |
 |
| 実験の様子。報酬予測の時間スケールを変えるとロボットの行動が変わる | 神経就職物質系によるメタ学習仮説 | セロトニン系による脳の報酬系の制御 |
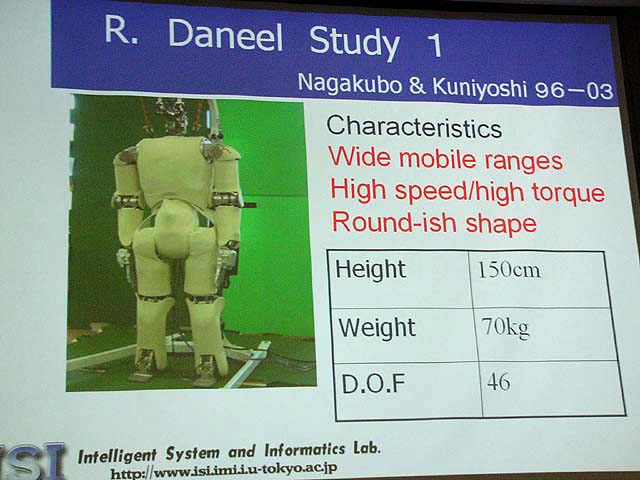
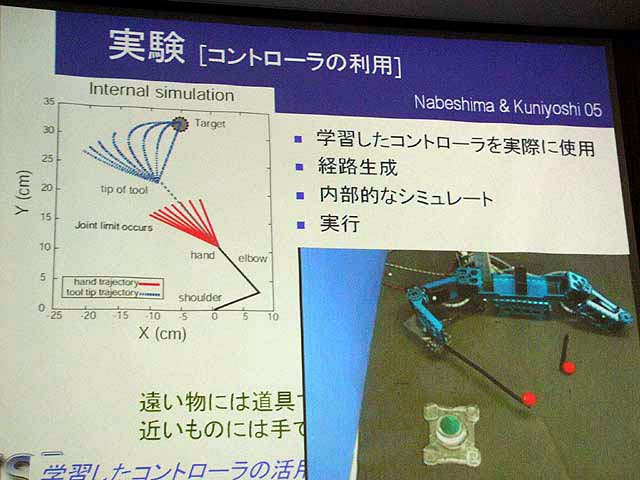
東京大学大学院 情報学環の國吉康夫教授は「身体性に基づくロボット認知の創発と発達」と題し、ダイナミックな身体の動きを使って起きあがるロボット・ダニールについてや、身体マップがセンサー入力からどのように自己組織化されるかといった研究について紹介した。人間の行動には「節」があり、そこだけに適切な制御をかけることで人間は運動を制御しているという。
身体像は模倣能力の基盤であり、身体と環境の動力学的構造が脳の情報構造を決めるという。そしてその構造は学習によって時空間で分割され、また、そこに他者の振る舞いの情報が入力されると、「引き込み」が起き、模倣あるいは他者行為の理解が発生するのではないか、という考えを述べた。
 |
 |
 |
| ダニール。150cm、70kg。自由度は46。本連載でも紹介済み | システム構成。特定のポイントで大電流が流せるようになっている | 【動画】起きあがり実験の様子。これは成功例 |
 |
 |
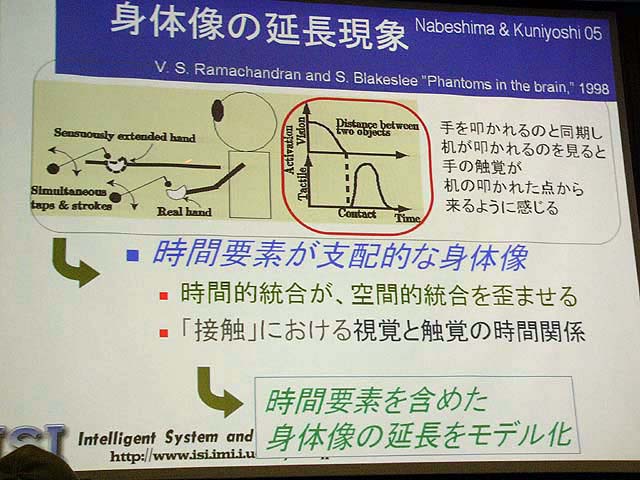 |
| 【動画】起きあがり実験の様子。失敗例。会場でもうけていた | ロボットに道具を持たせ、新たな身体像を獲得させる実験。使われている機体はRobovie M | 身体像の再編成には時間要素が重要だという |
以上、駆け足ではあるがざっと紹介した。ロボットから脳まで、一見遠いように見えるジャンルが混在しているので分かりにくく感じた方もいるかもしれない。
だがインテリジェンス・ダイナミクスが包括する領域が非常に広いこと、単にQRIOにちょっと賢そうな動きをさせようという研究ではないことはおわかり頂けたのではないかと思う。
 |
| 研究所の面々。「ご意見をお待ちしております」とのこと |
彼らの目標はかなり壮大なものだが、全くの夢というほど遠くはない。かなり現実的なものだ。
その一方で、まだ現段階でのモデルは、知能というよりは、その前段階的なものではないかという気もする。その点は研究所の人々も認めており、現在のモデルを何らかの形で階層化させることで、真の知能に近づけるのではないかと考えているようだった。
また、なまじっかQRIOがヒト型をしているために、見ている人間のほうが余計なことを考えてしまう面もある。たとえば、今回のデモにしても、QRIOではなくAIBO、あるいは虫型ロボットが使われていたら、見ているこちらの印象はまた違ったものになるだろう。
正直言って筆者は土井氏が「5年後に新しいロボットを作ることで結果を出す」と発言したことに驚いた。もっと先に目標を置いているものと考えていたからだ。だが取りあえず5年という形で期限を切り、その段階での成果をプロダクトに落とし込んでいくことで、また新しい視界が開けるのかもしれない。
なお、同研究所では現在、インテリジェンス・ダイナミクスに関する書籍をまとめているところだという。まだ現物の本を見てない段階でこんなことを言うのもなんだが、興味がある方はそちらを読んで頂くのが良いかもしれない。
□ソニー・インテリジェンス・ダイナミクス研究所
http://www.sonyidl.jp/
□関連記事
【2004年4月14日】【森山】ソニー・インテリジェント・ダイナミクス2004
http://pc.watch.impress.co.jp/docs/2004/0414/kyokai24.htm
【2003年9月29日】【森山】人間に手を差し伸べる机、部屋、計算機
http://pc.watch.impress.co.jp/docs/2003/0929/kyokai15.htm
(2005年4月22日)
[Reported by 森山和道]
【PC Watchホームページ】
PC Watch編集部 pc-watch-info@impress.co.jp ご質問に対して、個別にご回答はいたしません
Copyright (c) 2005 Impress Corporation, an Impress Group company. All rights reserved.