 |


■森山和道の「ヒトと機械の境界面」■ソニー・インテリジェント・ダイナミクス2004
|
 |
4月9日、五反田のソニー株式会社本社にて「インテリジェント・ダイナミクス2004 -脳・身体性・ロボット・知性の創発- 」と題されたシンポジウムが開催された。
「インテリジェント・ダイナミクス」は聞き慣れない言葉だが造語である。「構成論的脳科学」、「身体性認知科学」、「認知発達ロボティクス」の3分野を統合した新しい学問であるという。インテリジェント・ダイナミクスは従来の記号論的アプローチのAIの限界を超え、高度の知性を機械に発現させることを目的とした学問であり工学だとするシンポジウムの主催者 土井利忠ソニー上席常務による挨拶から始まった。
 |
| ソニー株式会社 業務執行役員上席常務 土井利忠氏。ライフダイナミクス研究所準備室室長、ソニーコンピュータサイエンス研究所会長も務める。「天外伺郎」のペンネームも持つ |
おそらく土井氏は、AIBOならびにQRIOの開発を通して、既存手法の作り込みによるロボティクスの限界を痛感したのだろう。作り込みでは結局、限定された環境でないと動くことはできないし、新しい動きや対人関係を持つこともできないので、どうしても飽きがくる。
いっぽう、ロボティクスならびに脳科学双方において、センサー入力とモーター出力のマッチングによる自己/環境モデルの獲得、インタラクションの結果に伴うシンボル処理こそが知性の基本なのではないかという議論が起きている。
また運動制御と認知メカニズムが以前考えられていたよりもずっと近いのではないかと考えられ始めている。今回のシンポジウムもそのような時代の流れを受けたものだと考えられる。ロボットへの応用をベースにしつつも、人間の脳や知性の根本的メカニズムの解明をねらったアプローチでもある。
シンポジウムでは、上記のような思想をベースに研究を行なっている研究者たちによる講演とパネルディスカッションが行なわれた。キーワードは強化学習、模倣、シンボル、自己組織化、創発といったところ。
「認知発達ロボティクスによる脳と心の理解」と題して講演した浅田氏は、最近は「ロボカップ」のほうでも知られるロボット研究者。
以前から認知発達ロボティクスの研究を行なっている。ヒューマノイドは人間を理解する新しい手段であると同時に、生物の理解からは新たなロボット設計のヒントが得られるという。
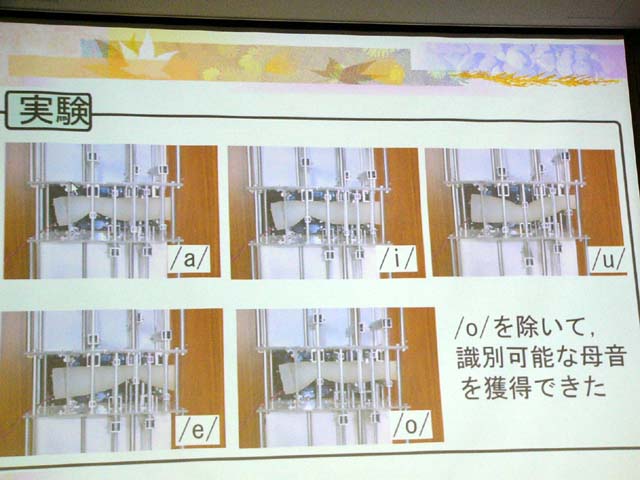
認知発達ロボティクスとは「理解の過程をロボット自身が環境との相互作用の中で見いだすことを期待」する新たな人工物設計理論を目指すものだとし、共同注意(他者が見ている対象を同時に見ること。指さしされると指ではなく対象を見るといった能力のことを指す)や、ニューラルネットワークを使って人間による教師付き学習によって母音を獲得する音声模倣の学習に関する研究の様子を発表した。
 |
 |
 |
| 大阪大学大学院工学研究科 知能・機能創成工学専攻 浅田稔教授。ロボカップ構想発案者。身体像、模倣などの研究を行なっている | 養育者がわりの人間の音声を聞き取ることで、連結重みを変えていき、母音のような音を獲得する機械。今後はさらに母親と乳児の相互作用を詳細に観察し、さらに人間の学習メカニズムを探っていくという | ロボットとの共同注意実験。試行錯誤学習でセンサー入力モータ出力間の相関を発見することで自力で共同注意能力を獲得させる |
ただ、会場からも質問があがっていたが、このアプローチは旧来の特定の能力を区切って取り出すアプローチの枠を出てないように筆者には感じられた。たとえば共同注意ひとつとっても、人間の子供がパッと共同注意可能になるのが生後18カ月だという話があるが、これは当然、視覚と運動制御のマッチングを行なう頭頂葉の発達過程と不可分だろう。
つまりヒトの場合は、頭頂葉が発達するに従って空間認知、空間把握の能力そのものが上がっていくのだと考えるのが妥当だと思われる。共同注意能力は、その枠組みの中で捉えられるべきであり、単に顔認識をしてどちらを向いているかといったメカニズムだけが共同注意の本質ではないだろう。
そのような、アーキテクチャの成長という前提を取り入れずに、単に注意のメカニズムだけに目を向けても既存のアプローチの枠を抜け出ていないのではなかろうか。今後に期待している。
「計算論的神経科学(computational neuroscience)」を掲げ、脳の計算論的理解を進めることを目標に研究を行なっている川人光男氏は、「脳とヒューマノイドを創る事により脳を知る」と題して講演。川人氏らはさまざまな知見をベースに構築した脳のモデルを計算機(ロボット)に実装することで検証するという研究アプローチで脳のメカニズムを理解しようとしている。
講演では「DB(Dynamic Brain)」というロボットを使った実験の様子やCPG(Central Patern Generator)を使った周期運動学習プリミティブを使った二足歩行デモの様子を見せながら「モザイク(MOSAIC:MOdular Selection And Identification Control)」と呼ばれる「多重順逆対モデル」の考え方を述べた。
運動指令によって出力される軌道が順モデルで、ある運動軌道から逆に計算される運動指令が逆モデルだ。この両者を組み合わせたものが順逆モデルである。人間は、この順逆モデルを脳のなかに持ち、最適な軌道を計算しながら運動していると考えられている。内部モデルが獲得されるほど運動は巧みに行なえるようになる。
川人氏らは、人間は世界を認識して行動するために、多重順逆モデル対(モザイク)を学習することで多重逆モデルを学習したりスイッチングしたりしていると考えている。内部モデルはモジュール化、階層化しており、その学習は、順モデルによる予測の相対的誤差に基づく責任信号によってモジュールがスイッチングされることで行なわれるという。
そしてこのモデルは、行動のスイッチングだけではなく、シンボル生成や模倣、心の理論などを説明することが可能だとした。fMRIによる脳画像そのほかのデータを示し、人間ではモザイクは小脳にあり、スイッチングは前頭前野が行なっているという考えを示した。現在は、さらなる検証を行なうため新型ヒューマノイドの開発を行なっているそうだ。
 |
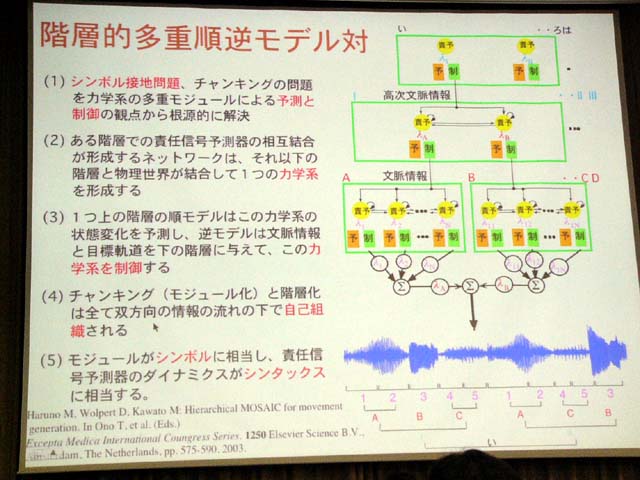 |
| 株式会社国際電気通信基礎技術研究所(ATR)脳情報研究所 所長 川人光男氏。著書に『脳の計算理論』ほか | 階層的多重順逆モデル対による音声シンボル化の例。ただし図は人間ではなく小鳥の歌 |
昼休みにはQRIOがデモンストレーション。ランドマークを見ながら歩き回ったり、ボールを蹴ったり、歌いながらダンスを踊るといったお馴染みのデモを見せた。
 |
 |
 |
| バッテリ交換のために胸を開けたQRIO。一般の前でフタを開けたのはたぶん初めてではないだろうか。フタの裏側も複雑な形状をしている。強度維持のためだろうか | 障害を途中に置かれても自分で避けていくデモ。なお床に置かれた物体はQRIO自身のバッテリ。これが横向きに胴体の中に収められている | |
 |
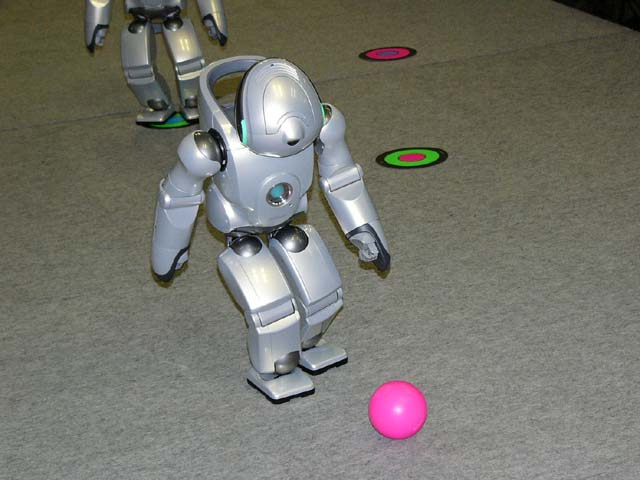 |
| 呼びかけに応じて振り向き、顔を認識して近寄っていく | ボールを蹴る。愛らしい姿はやはり人気者 |
谷 淳氏は「認知の問題へのロボット構成論的アプローチ」と題して「運動パターンに関する分散的記憶の構成」と「ロボットと人間のジョイントアテンション」について講演した。
川人氏らが運動プリミティブが局所的に表現されていて、それをモジュールを選ぶことで切り変えると考えているのに対して、分散表現の場合は、Parametric Bias(PB)によって境界条件を変化させると考えるのだという。
また人間とのジョイントアテンションとは、いわば人間とロボットの動きのシンクロのこと。まずロボットは目の前の人間の運動パターンを予測学習し、それに対応する自分のアクチュエーターの動かし方を学習する。この段階で物まねが可能になる。そのあと、人間は違う運動パターンを示す。するとロボットのなかでは予測誤差が生じる。それに応じてPBが変化しRNN(再帰的ニューラルネットワーク)の結合状態が変わり、ロボットの運動パターンを変化させることができる、というものだ。QRIOの前でボールを見せて腕をふるといった実験の様子が紹介された。この仕組みをロボットに入れて実験を行なうと、ロボットが人間に合わせようとすると同時に、人間の側がロボットに合わせて動くといった状態が生まれる。
 |
 |
| 理化学研究所 脳科学総合研究センター 動的認知行動研究室 チームリーダー 谷 淳氏 。身体と環境を含む力学ループのなかで自然に発生するダイナミクスが認知であるという | ロボットと人間との相互適応の実験の様子 |
中村仁彦氏は「身体と運動と知能をつなぐ力学的情報処理」と題し、非線形力学を制御や情報処理に応用する考え方について述べた。中村氏によればキーワードは、「記号と運動」「離散と連続」だという。
世界や運動は連続的だが、我々は何らかの手法で世界を離散化あるいは記号化することで情報処理・操作可能な対象として、世界に働きかけている。ロボットも同様な能力を持たないと自由に動くことはできない。両者を繋ぐ必要がある。
講演では多次元の動きを低次元に落とし込んで運動遷移を行なう研究や、人間をモデル化したヒューマンフィギュアの研究の様子などが紹介された。隠れマルコフモデル(HMM)を使って運動認識と生成の情報処理を単一モデルで実現する数理モデルの実現を目指しており、このミラーニューロン数理モデルは、未知の運動を既知運動の組み合わせとして認識し、なおかつ新しい動きをプリミティブな動きの組み合わせで生成する機能を実現したという。
またテレンス・ディーコンによる『ヒトはいかにして人となったか 言語と脳の共進化』(新曜社)の図を引き、アイコンをいかにしてインデックス化するか、さらにそれをどのようにしてシンボルにしていくかがこれからの大きな課題であると述べた。
 |
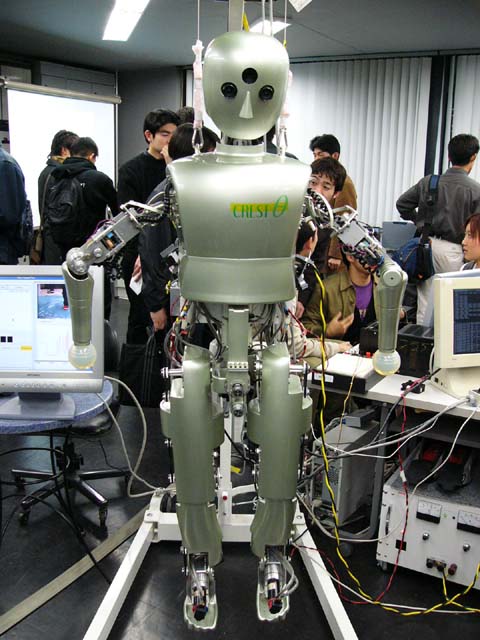 |
| 東京大学大学院情報理工学系研究科 中村仁彦教授。(独)JSTの事業CRESTでは「自律的行動単位の力学的結合による脳型情報処理機械の開発」という研究を行なっている | 中村研のロボット「CRESTθ」。二重球面ジョイントの腰、脱力することも高トルクをかけることも可能なバックラッシュクラッチの膝を持つ。写真は2003年11月に行なわれたCREST成果発表会時のもの |
ソニーの藤田雅博 氏は「“デザインされた自律行動”対“創発される自律行動”」と題して、全体のまとめ的話とQRIOについて講演した。
藤田氏によればロボットのキーテクノロジーは3つ。リアルタイムに全身を制御して運動する「実世界運動制御技術」、聴覚や視覚センサを使って外界を認識する「実世界空間知覚技術」、顔や話者、音声を認識する「実世界認識技術」だ。この3つの技術をいかに統合して自律行動させるかが鍵になる。ソニーではこれを「統合制御アーキテクチャ」と呼んでいる。
 |
 |
 |
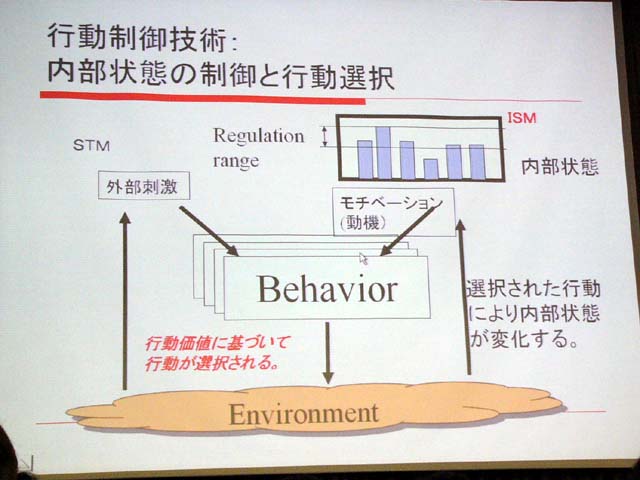
| QRIOの行動アーキテクチャ(EGOアーキテクチャ) | QRIOの行動制御技術に関する図。行動選択に関する内部状態の仕組み | ソニー株式会社 ライフ・ダイナミクス研究所準備室 リサーチディレクター 藤田雅博氏。ロボット記事を追いかけている読者ならばAIBOのときからお馴染みのはず |
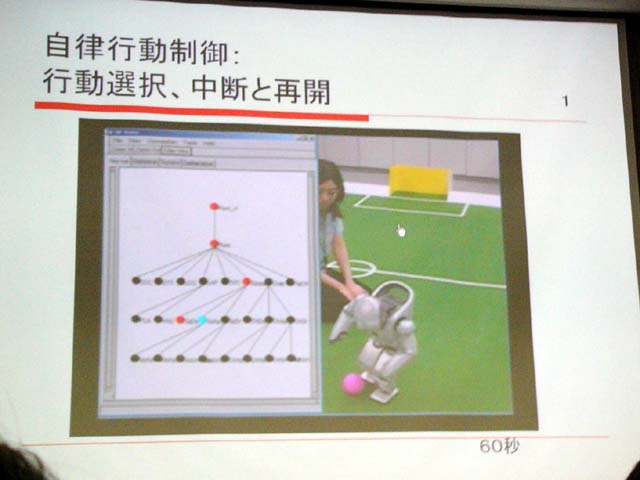
QRIOは自分の内部状態を持ち、「動機」や「意欲」を持っている。デモではボールを蹴ろうとしているところに女性から話しかけられ、そちらに注意を向けるがやっぱりボールをケリに行く、というビデオが披露され、「女性よりもボールを取った」と会場の笑いを誘った。
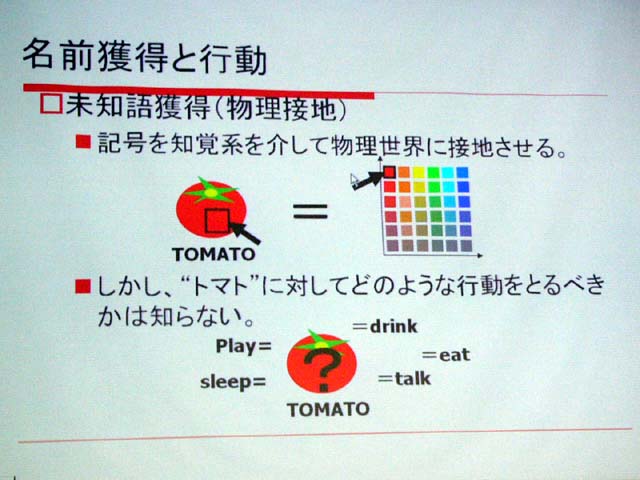
また、QRIOは新しい事物に対して言葉を覚えることができる。ただし現状では、未知語を獲得することはできるが意味を獲得することはできない。今後は、新しい物体に対してアクションを起こしたことにより、内部状態の変化を起こし、それによって意味を獲得させるといったやり方を試していくという。
 |
 |
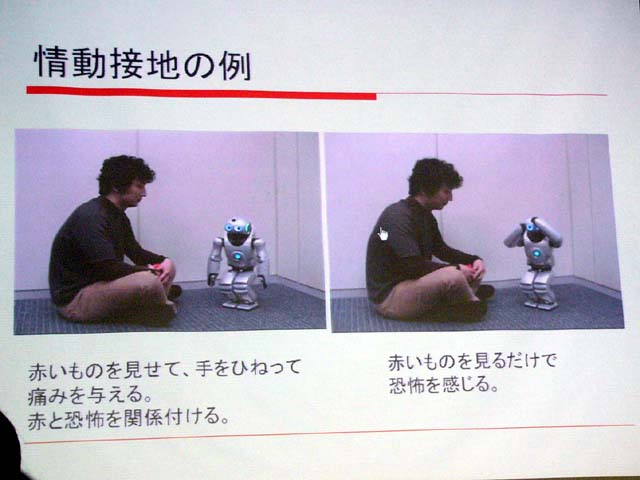 |
| 女性よりボールを取るQRIO。左のツリー図はQRIOが行動の選択状態を表す | 未知語獲得と行動の関係。まだ言葉の意味を把握することは出来ない | 赤いものを見せたときに同時に別のセンサ入力を与え、それを「恐怖」としておくと、また赤いものを見せただけで「恐怖」のアクションを取る。これだけでは情動接地とは言えないと思うが…… |
今後は、ロボットと環境のインタラクション、ロボット自らの身体や環境のモデルの獲得、行動・インタラクションの創発、飽きないインタラクションの実現、シンボル創発、言語などが課題・目標である。問題は、何をデザインし、何を創発させるか、いわばデザインの切り分けの問題、そして模倣、そして自律行動の創発はどのようにすればいいのかという点にある。
典型的な運動制御系の考え方は、タスクや環境、オブジェクトや自分のボディに関する構成を部品化し、部品化したモデルを持ち、目標軌道を生成するという構成になっている。
川人氏のモザイクは、モデル誤差を評価関数としてモデルを学習獲得するための仕組みだ。古典的アプローチが身体モデル、環境モデル、目標軌道を与えて、それをきっちりと目標軌道に向かって制御するというものであったとすれば、新しい強化学習的アプローチは評価関数を与える、あるいは模倣による教示を通して、身体・環境モデルを獲得させ、新しい行動を創発させるものだと捉えられるという。問題は、模倣で示されてない行動を創発させることができるかという点にある。
講演では、東大 中村氏や理研 谷氏による研究のソニーによる追試の様子が紹介された。
 |
 |
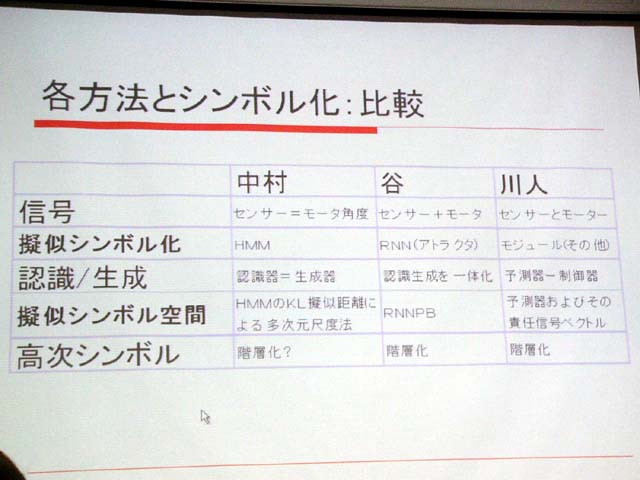 |
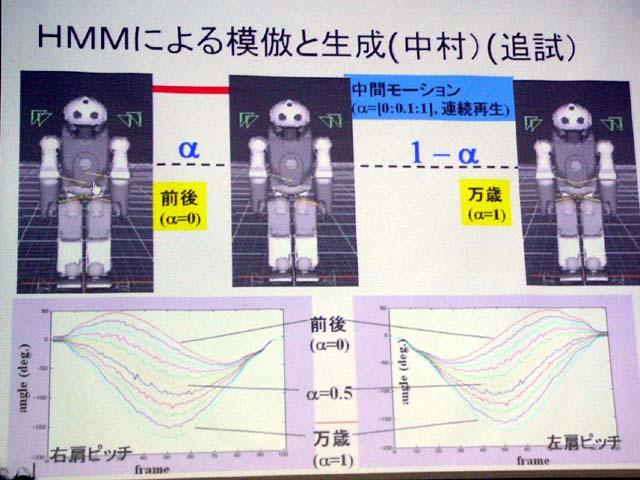
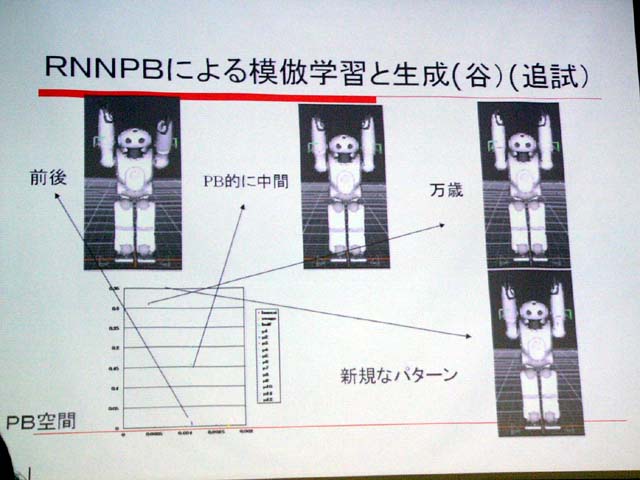
| HMM(隠れマルコフモデル)を使った東大・中村教授の研究の追試。前後に手を振っている動きから万歳の動きへ。中間の運動が創発された | RNNPBを使った理研・谷氏の研究の追試。同上 | ソニー藤田氏による中村、谷、川人3氏の研究のまとめと比較図。基本的に3者とも、センサーとモーターからの信号を使っており、何らかの手法を使って状態遷移を疑似シンボル化する。それを認識・生成器を通して疑似シンボル空間に表現して内挿・外挿などのシンボル操作を行なうことで、行動創発をねらう。高次シンボルはいずれも階層化によって実現しようとしているとした |
模倣の意義は、教示によって行動探索を適切化しながら、プリミティブなモーションを自己組織的に獲得し、それを組み合わせて新規モーションを生成させることができる点にあるという。
人間の幼児は人まね、物まねが好きだ。人間はどのように適切な動きを取っているのだろうか。また、模倣したがる理由はなんだろうか。模倣から自律行動へ繋げるために必要なものはなんだろうか。今後は、本能的な目標設定だけではなく、高次の報酬評価や目標精製を行なうことができるようにロボットの成長発達シナリオを設計していくことが必要になる。
 |
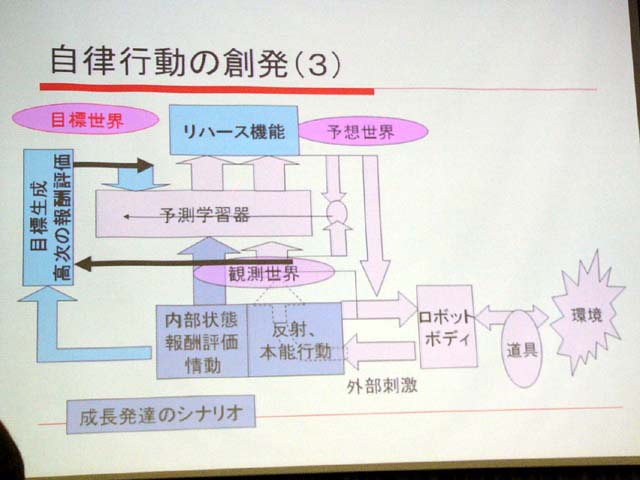 |
| QRIOの動きを真似る女の子。なぜ人間は相手の動きと自分の体の動きを適切に対応させることができるのか。また、模倣の動機はなにか | ロボットと実世界、行動の関係。観測世界から価値関数、予測学習器を通して予測世界を構築し自分のボディまたは道具を通して働きかけを行なう |
今後は、「飽きさせない引き込み系」と「身体に基づく非言語コミュニケーション」を追求していくという。脳科学やロボティクスの発展の結果、見ているこちらも踊り出したくなるような華麗なダンスを、QRIOが勝手に踊り出す日が来ることを願おう。
●ロボットは意識を持つか
 |
シンポジウムの最後は「ロボットは意識を持つか」と題した出席者全員によるパネルディスカッション。辞書にのっている意識の定義から始まり、「科学者の立場を離れて自由に意見を言ってもらいたい」という土井常務の呼びかけに応じて(?)、ざっくばらんな議論が行なわれた。
なお土井氏自身は「センサー入力とモーター出力からなる多くの混沌とした情報の中から、自己のモデルを抜き出し、自分と外界とのかかわりを客観的に、統合的に、かつ価値観をともなって把握し、それに基づく行動を計画する心の働き」だと考えているという。
なお、ソニーによればシンポジウムの参加者は800人。会場にはロボット研究者や人工知能の研究者など、多数の研究者やメーカーの人々の姿があり、多くの人が興味関心を持っていると見受けられた。
今回のシンポジウムは「ライフ・ダイナミクス研究所 準備室」が事務局を務めている。ライフ・ダイナミクス研究所はソニーが新設予定の研究所で、脳科学や次世代ロボットを研究する予定。現在の技術の延長とは違った方向で貢献していくことを目指すとしている。
ソニーのような大企業にとっても、すぐに役に立つとは思いにくい研究への投資はリスクだろう。だが今一度、知覚とは何か、認識とは何か、モダリティとは何か、身体の果たす役割は何か、といった基本的なところから考え直さなければ、未来の道は見えてこないと判断したものと推測される。まだまだ道は遠いと思うが、今後に期待する。
□ソニー インテリジェント・ダイナミクス2004
http://www.sony.co.jp/SonyInfo/idsympo2004/
□関連記事
【2003年4月9日】【森山】第7回:ROBODEX2003レポート
~セミナーではこんな話が繰り広げられた編
(今回の講演者のうち、藤田、土井、川人、谷の4氏が共通講演者)
http://pc.watch.impress.co.jp/docs/2003/0409/kyokai07.htm
(2004年4月14日)
[Reported by 森山和道]
【PC Watchホームページ】
PC Watch編集部 pc-watch-info@impress.co.jp 個別にご回答することはいたしかねます。
Copyright (c) 2004 Impress Corporation All rights reserved.