 |


■森山和道の「ヒトと機械の境界面」■
|
4月7日、ソニー・インテリジェンス・ダイナミクス研究所によって「インテリジェンス・ダイナミクス2006」が開催された。今年で3回目。第1回と第2回についてはそれぞれ本連載のレポートをご覧頂きたい。
●知能とは何か
 |
| ソニー・インテリジェンス・ダイナミクス研究所所長・土井利忠氏 |
「インテリジェンス・ダイナミクス(動的知能学)」とは「身体性を通してインテリジェンスを創発させる新しい人工知能の方法論と、ロボットを使った実世界とのインタラクションを通じて計算モデルを検証する構成論的脳科学を統合すべく提案中の名称」で、同所の造語。
目的は、ブレイン・サイエンスの知見を使って工学的に機械知能を実現することだ。人工知能という言葉を使わないのは、旧来的な記号処理ベースの人工知能とは違うものであることを強調するためである。
知能とは「環境に適応して自らを変化させ、あるいは適切な行動を選択する計算能力」とインテリジェンス・ダイナミクス研究所所長の土井利忠氏は定義している。知能とは「計算能力」であるというのが土井氏の強い主張だ。生物は計算能力と構造が一体化しているが、機械の場合は、たとえばモーターは制御系なしでは行動はしない。
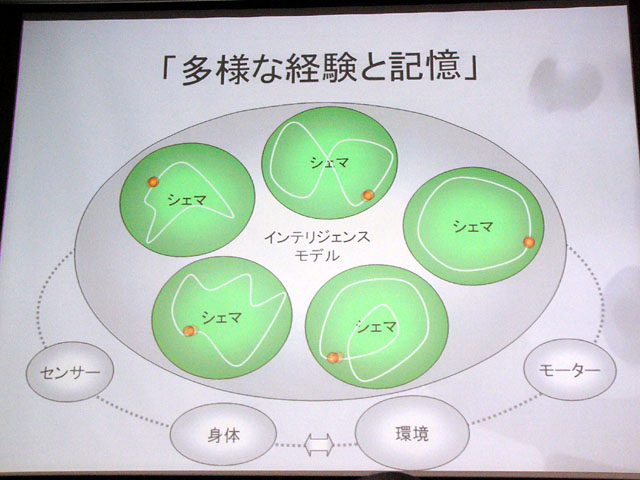
土井氏らは動的知能の定義を探る上で、発達心理学者のピアジェが提唱した「シェマ」に行き着いたという。土井氏らが定義し直したシェマとは「時系列的なデータが構造化することで汎化された記憶」のこと。変化する環境に対して汎化された記憶に基づく予測能力で対応し、学習していく(=動的知能)を実現するためには、たとえそれが18カ月の幼児程度の知能であっても、1つの計算モデルの上に少なくとも1万程度のシェマの蓄積が必要であると宣言した。現在、同研究所では、たくさんのシェマを獲得することに重点をおいて研究を進めているという。
●偶有的な脳(The Contingent Brain)
 |
| ソニー・コンピュータ・サイエンス研究所シニアリサーチャー・茂木健一郎氏 |
続けて、ソニー・コンピュータ・サイエンス研究所(CSL)の茂木健一郎氏が「偶有的な脳(The Contingent Brain)」と題して講演した。茂木氏は「クオリア(感覚質)」の重要性を強調していることで広く知られる研究者。ソニーCSLだけではなく、東京工業大学大学院総合理工学研究科知能システム科学専攻でもラボを持ち、学生たちと神経回路網、視聴覚統合、幼児の言語発達、神経経済学、ボディイメージやエピソード記憶など、幅広く研究を進めているという。
茂木氏は「我々の知能はオープンエンディッドであり、生まれ対育ちという捉え方は意味がない」という。生物の学習には終わりがない(オープンエンディッド)。そこが根本的に、現在の機械知能とは違うところである。脳科学は非侵襲計測技術等の技術により飛躍的に発展している。だが機能局在を記述していってもインテリジェンスには迫れない。「我々のインテリジェンスは異様な形をしており、ノーベル賞100個分くらいの秘密が隠されている。それを象徴するのがクオリアだ」という。
クオリアとは意識の中に現れる数字で記述できない感覚質のことだ。たとえば「透明感のクオリア」を考えよう。透明という色があるわけではない。ローカルに見ると、そこにはある特定の色があるだけだ。つまり視覚認識は単なる波長の空間分布では記述できないことを示していると茂木氏は語る。
意識の問題は長く「サブカルチャーの愛好物」でしかなかったが、コッホとクリックという2人の研究者らが盛り上げたこともあり、科学の俎上に上がるようになった。ただ、茂木氏自身は意識の問題が解けるのは100年以上先のことだと考えているそうだ。
現在のPETやfMRI等を使った研究は、脳活動を計測し、それに対してどのような感覚があるか、その対応を調べることに終始している。いわゆるマッピングだ。だがこの手法では、知能の本質にはなかなか迫ることができない。
では知能の本質とは何だろうか。我々の持つ知識の不思議なところは、認知的安定性があると同時に、時と共に変化することである。つまりある程度安定したものとして存在している一方で、上書きによって変化していくことが可能なのだ。「動的適応性と認知的安定性を結びつけることができている」、これが驚くべきことだ。この性質により、我々はビジョンによる物体認識や、音声認識も可能になっている。
ここで重要な概念が「偶有性」だという。半ば規則的で、半ば不規則。脳は、そのような世界を情報処理するために進化してきている。そしてクオリアは、偶有性の知覚における認知的安定性を保証するために、世界を記述する知覚セットとして存在しているのではないかと茂木氏は語る。
たとえばコカコーラが最初に登場したときには、その味は表現しがたい、まったくわけの分からない飲み物だった。だがコーラの味という感覚も、やがて安定的なものへと変化していく。そのように脳は絶えず偶有性に対して情報処理を行なっているのだという。
また茂木氏は、「インテリジェンスの本質は記憶のなかにある」という。コンピュータの「記憶」は安定している。記憶というよりむしろ記録と呼ぶべきだろう。しかし脳の記憶のシステムは、絶えず編集され続けることを前提としている。この「記憶の編集過程が知性の本質」だという。
人間の脳では、一度読み出した記憶に対しては、コンソリデーション、すなわち統合定着過程が起こる。そのためには2週間程度かかるとされている。また読み出されるともう一度コンソリデーションが起こる。そのときには読み出された記憶が弱くなる可能性があることが茂木氏らによるピアノの練習を使った実験でも確認されているという。つまり干渉が起こると記憶は脆弱になることがあるということだ。「このようなダイナミクスのなかに記憶を理解する種がある」と茂木氏はいう。人間は、記憶を収納していくときに、一週間くらいの記憶と照らし合わせながらその記憶を収納しているらしいという。
また、人間の記憶は機械の記憶とは違って、正確ではない。だが、正確に記憶することと意味を引き出すことにはトレードオフの関係があるのだという。たとえば「サヴァン症候群」と呼ばれる症例がある。彼らのなかには天才的な芸術能力を示す人たちがいる。たとえば写真を見ただけで詳細なウマの彫像を彫ったりする人がいるのだ。だが彼らは、記憶の編集能力が一般に低い。つまり普通の人は、世界を見たときにおおざっぱにカテゴリー化して理解し、それを記憶に収納する。機械のように記憶しているわけではない。その結果、絵を描かせてもへたくそな絵しか描けなかったりするのだが「機械的な絵よりもへたくそな絵のなかにインテリジェンスがある」のだという。
では、どのように我々は世界をカテゴリー化しているのか? これこそが人工知能研究が躓いた原因だが、当然のことながら、世界は最初からシンボリックにあるわけではない。おそらく脳は、感覚情報としての入力が似ているかどうか、それにあわせて世界を再構築していくのだろうという。
我々の脳は、近似や類似からつくっていくボトムアップ的なシンボルと、トップダウンの記号を使った認知、両方を使って世界を認識していると考えられる。例えばわれわれは、机を見ると「机」というラベルをつけてしまって、詳細は見ない。だが、サヴァンの子どもは詳細を見てしまって、逆にカテゴリー化はできない。そしておそらく「天才」と呼ばれる人々は、この両方ができるのだろうという。
茂木氏らが現在力をいれている研究分野は、報酬系と学習の関係だという。学習理論は大別すると2つある。「教師あり学習」と「教師なし学習(強化学習)」だ。後者が、価値の多様性や倫理観と関わっているという。何を持って快楽だと思うかは、人それぞれだ。それによって、脳が変わっていく。
「今後10年間の脳科学は不確実性を中心に回っていく」と強調する茂木氏らは、不確実な状態での人間の行動原理を探る「神経経済学」と呼ばれる分野に注力しているそうだ。経済学でいう「効用」が確率構造が分からず定義できないような状況において、人間がどのような原理で振る舞っているのかを探る研究だ。また、ある選択肢があったときに、確率を計算すると全く同じ確率なのに、人間の選択が偏ることがある。そのときに人間は何を判断材料としているのかという研究分野である。
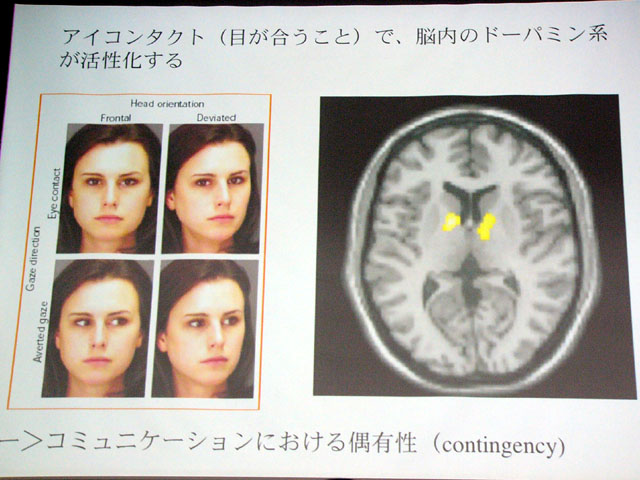
茂木氏によればコミュニケーションも不確実な状況における人間の行動の問題、「偶有性」の問題だ。たとえばアイコンタクトすると報酬に関与するドーパミン系が活性化するのだという。
人間は、未知の報酬を自分で仮定して、探索する動物である。このような観点から見れば、人間全体や企業や文化の問題全体も、脳科学の視点から見ることが可能だ。
たとえば、インターネット上のウェブサイトのうち、どこに行くかは情動系のダイナミクスそのものとして理解することができるという。「インターネット上のトラフィックを研究することは、脳の働きを見ているのと似ている」と茂木氏は語り、脳科学は今はカネにもなる分野になりつつあると述べた。
茂木氏によれば、脳のシステムはおそらく「グラフ理論に時間的なダイナミクスを入れたような」数学的構造として理解できるのではないかという。これと身体性と安定性の関係、土井氏らの1万のシェマがどのようにくっつくのか、そこを議論できると面白いと述べた。
 |
 |
| アイコンタクトでドーパミン系が活性化する | 完全な「ランダム」と「レギュラー」の間に、脳が処理すべき「世界」は位置する |
●多様な経験から生み出されるインテリジェンス・モデル
 |
| インテリジェンス・ダイナミクス研究所シニアリサーチャー南野活樹氏 |
続けて、「多様な経験から生み出されるインテリジェンス・モデル」と題してソニー・インテリジェンス・ダイナミクス研究所シニアリサーチャーの南野活樹氏による、同研究所の目的に関する講演が行なわれた。
2004年7月に設立された同研究所の目的は、環境との相互作用を通して得られる多種多様な経験を、我々がどのように積み上げて記憶し、利用しているのか突き止め、それを工学的に実現することだ。そのために知能をモデル化する「インテリジェンス・モデル」の研究と「飽きないインタラクション」を実現するための研究が行なわれている。
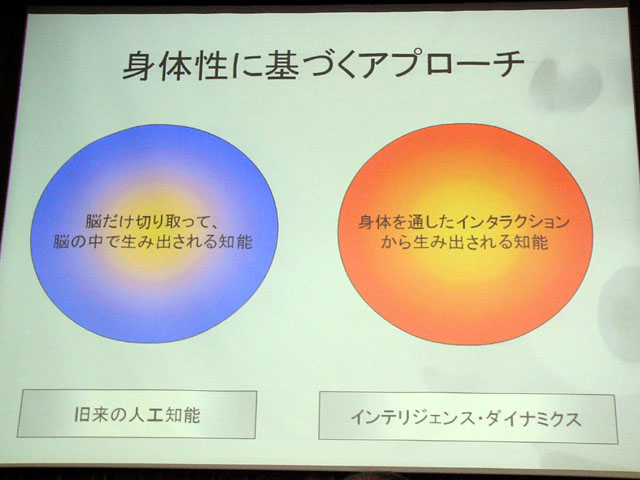
作り込みのロボットを相手にしていてもすぐに飽きてしまう。だが、機械が知的な主体となれるのであれば、たとえば新しい行動を創発し、環境に対してアプローチできるようになれれば、飽きないロボットを作り出すこともできる。そのために旧来の記号処理優先の人工知能研究に対して、身体を与え、環境との相互作用を通じたアプローチで知能の研究を行なっている。
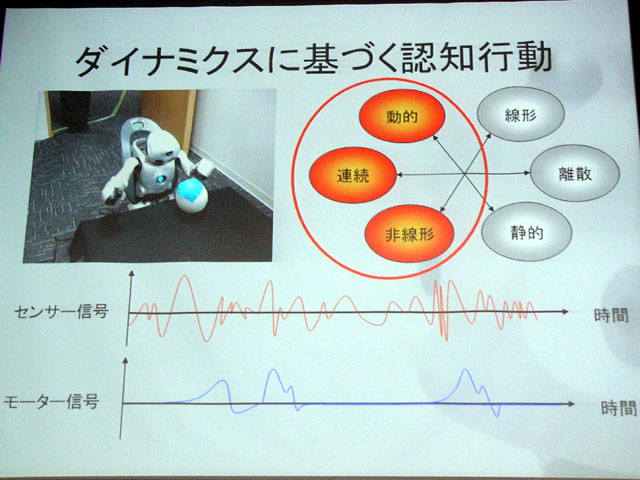
なおダイナミクスとは時間発展方程式で表現できる、時間との関係性を記述したもののことである。たとえば転がるボールの動きは、動いているダイナミクスとして記述することではじめて理解できる。同研究所では、ダイナミクスに基づいた認知行動が、知能を実現する上では不可欠だと考えている。
 |
 |
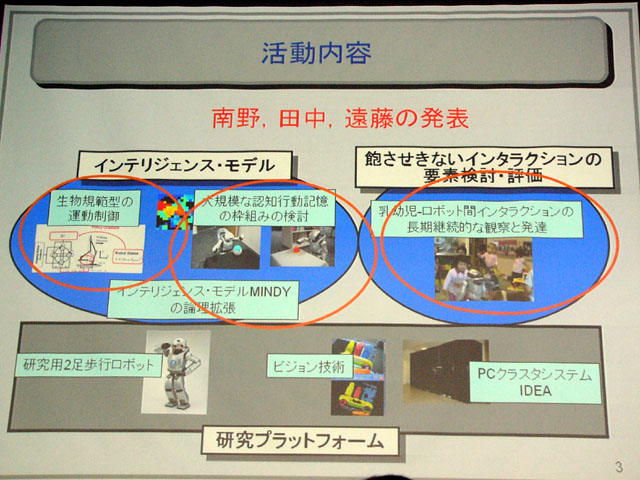 |
| 旧来の人工知能と身体性を重視する「インテリジェンス・ダイナミクス」の違い | ダイナミクスに基づいた認知行動 | インテリジェンス・ダイナミクス研究所の活動内容 |
同研究所の考えるインテリジェンスモデルが「MINDY(Model of Intelligence Dynamics、またはMind based on Bodyの略)」である。これは6つの機能を構成することで、価値基準を自分のなかで持ち、生得的なものと学習して獲得した経験を利用して行動するインテリジェンス・ダイナミクスの実現を目指したもの。
南野氏は、インテリジェンスモデルの課題は、「生得性とデザイン」、「自律性と動機」、「可塑性と記憶」、「汎化と行動生成」、「探索と終息性」、「価値と創発」にあるとまとめた。「経験」をダイナミクスで記述することをどのように工学的に実現するかと考えたときに、前述の「シェマ」に到達したという。同研究所では多様な経験を記憶していく、つまり多数のシェマを蓄積できるインテリジェンスモデルの実現を目指している。そのためには大規模な記憶構造を形成し、それが自律的に記憶構造を形成すると同時に安定したダイナミクスを持ち、なおかつ適切に想起できるようなものであることが必要条件になる。
現在、同研究所では「RNN-SOM」という再帰的ニューラルネットワーク(RNN)と、自己組織化マップ(SOM)を組み合わせたものを使って、それを実現しようとしている。学習の収束性、安定性、計算効率から、多数の小規模なRNNモジュールから構成されたSOMという構造が適切だと考えたのだという。RNN-SOMを使って学習させていくと、経験がノードに学習されていき、全体として構造化されていき、各モジュールの役割分担ができていく。
 |
 |
 |
| 多数のシェマから構成されるインテリジェンスモデルの概念図 | RNN-SOMの概念図 | RNN-SOMの学習過程 |
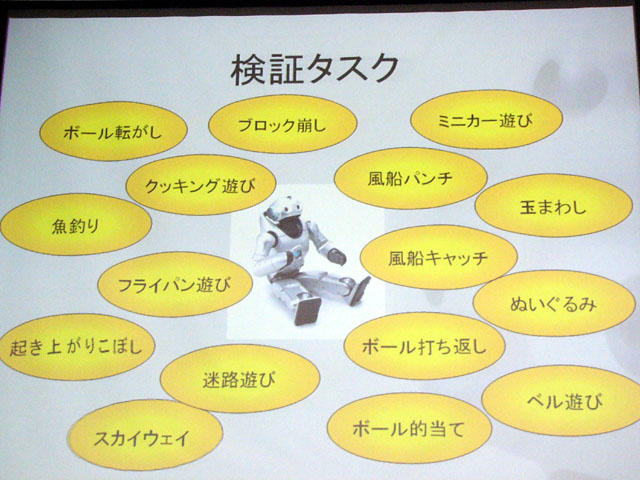
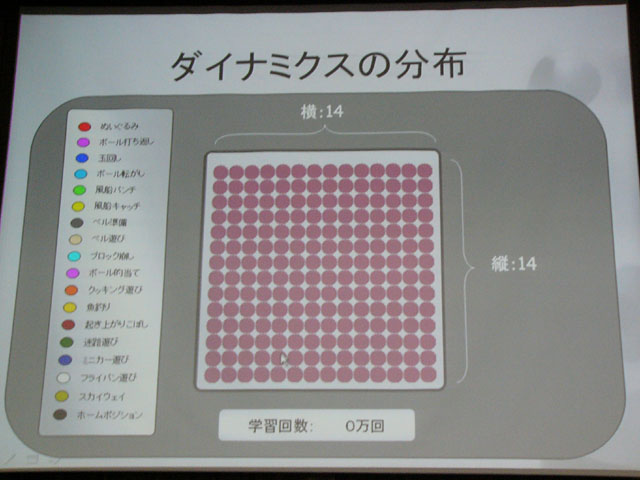
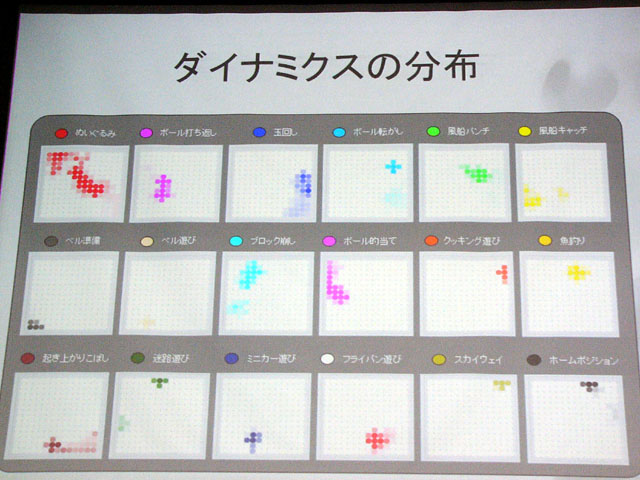
同研究所では14×14=196ノードのRNN-SOMを使って検証実験を行なった。実験は、ボール転がしやフライパン遊び、起きあがりこぼしなど24種類のさまざまな遊びをタスクとしてランダムにロボットに教示。その結果をPCクラスタを使ってオフラインで24時間かけて100万回繰り返し学習させ、RNN-SONを自己組織化させた。講演では実際にダイナミクスが学習を繰り返し経験を積んでいくことでRNN-SOM上で自己組織化して分布していく様子がビデオで示された。
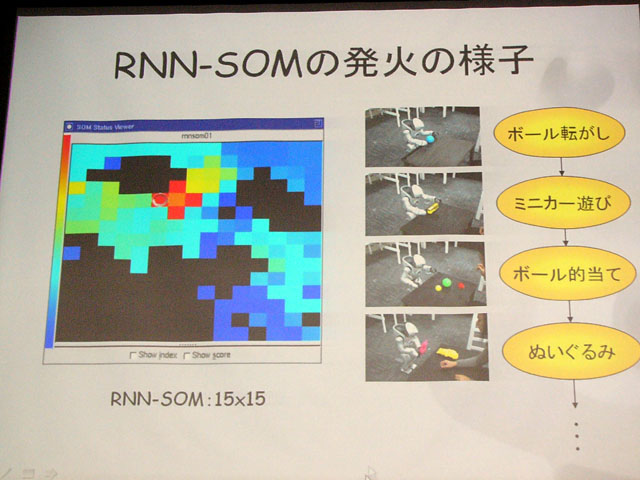
学習させたあとは、ロボットにそのタスクに使ったシグナルを見せると引き込まれて、その動作が生成されるようになった。
同研究所では、自律的な統合モデル系、ダイナミクスを記憶していくことの重要性を重視し、ロボットが自分が持つダイナミクスを使いながら自分が見た状況に応じて自ら行動を創出していくように、今後もMINDYを高度化させていくという。非常に原始的なものながら、これは「記憶が経験に行く過程の第一歩」だと考えているそうだ。
 |
 |
| 検証タスク | 教示の様子 |
 |
 |
 |
| 学習前のRNN-SOM | 70万回学習させたあとのRNN-SOM | 100万回学習させたあとのRNN-SOM |
 |
 |
 |
| ダイナミクスの分布。色々な経験がマップの上で形作られていることを示すという | RNN-SOMが刺激に応じて「発火」する様子 | 【動画】状況に応じた記憶の想起の例(発表の様子を再撮) |
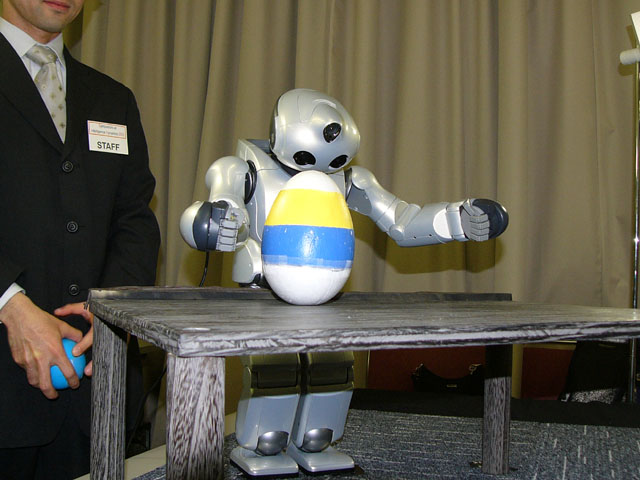
●成果デモ
昼休みには、デモンストレーションが実施された。なお、デモはソニーの二足歩行ロボット「QRIO」に実装した形で行なわれたが、今回の同研究所ではあくまでQRIOを研究用のプラットフォームとして使っているものであり、商品開発を目的としたものではないことを読者の方々にもお断りしておく。ソニーがロボット「事業」から撤退したことは過日お知らせしているとおりである。
展示されたデモは、ビジョン技術、MINDYを使った多シェマ統合デモ、同技術デモ、CPG(セントラル・パターン・ジェネレーター)を使った2足歩行技術、そして同研究所が使っているPCクラスタ「IDEA Jr」の4つ。
 |
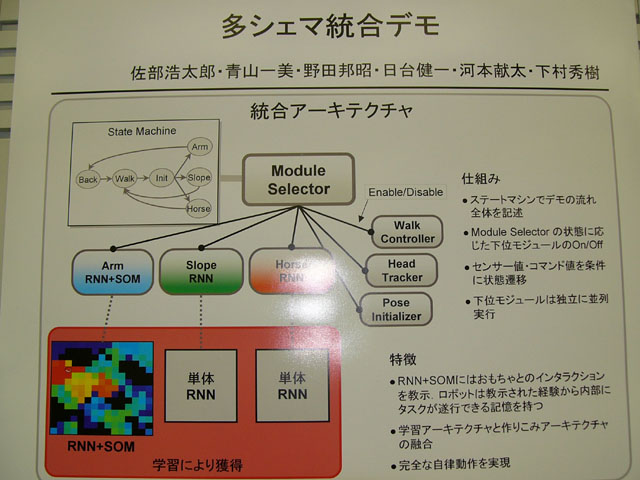 |
| 多シェマ統合デモ。マーカーをビジョンで発見し近寄っていき、事前に学習した経験をもとに状況に合わせて「遊ぶ」様子が披露された。違う行動のときにはそれぞれ違うRNNが発火している | デモの概略 |
 |
 |
 |
| 【動画】ボールを転がす | 【動画】積み木を崩す | 【動画】ベルを鳴らそうとする |
 |
 |
| 【動画】ミニカーを転がす | 【動画】スカイウェイ |
 |
 |
 |
| ベルを鳴らす | マークを見つけて滑り台に近寄るQRIO | 座り込んで準備オーケー |
 |
 |
 |
| 横の支柱を自分で押して滑り台を滑る | ぶつからないように腕をあげて滑る | 【動画】滑り台を滑る様子 |
 |
 |
| 木馬に乗って遊ぶ | 【動画】自分のジャイロと各速度センサーを使って、微妙に腰を振って木馬を揺らす |
 |
 |
 |
| 【動画】多シェマ技術デモ。黄色いライオンのぬいぐるみを発見して掴もうとするが失敗 | こちらは無事に掴んだところ | 【動画】フライパンを回してボールを転がす |
 |
 |
| 【動画】ボーリング遊び。まるで、早くボールを打たせろと言っているようだ | 起きあがりこぼしで遊ぶ |
 |
 |
| 【動画】CPGを使った歩行デモの様子 | RNN-SOMを学習させるPCクラスタIDEA |
●初期発達のダイナミクス
午後の講演は東京大学大学院教育学研究科助教授の多賀厳太郎氏による「初期発達のダイナミクス」から再開した。
多賀氏は二足歩行のダイナミクスには非線形力学がコアにあると考え、歩行パターンそのほか周期的な運動において重要な役割を果たしていると考えられているセントラル・パターン・ジェネレーター(CPG)を非線形振動子の結合系を使ってモデル化し、二足歩行モデルを構築した研究で知られている。現在は赤ちゃんの発達の研究を、特に発達過程における「U字型現象」に着目して進めている。
U字型現象とは、当初現れていた運動が一度消失し、その後で再び現れるような変化のことだ。たとえば赤ちゃんは原始反射と呼ばれる運動を見せることがある。生まれたばかりでも、あたかも歩くかのような脚の動きをすることがあるのだ。だがそれはやがて消えてしまい、再び歩行動作が出現する。このような変化をU字型発達という。同様の現象は、音の定位や模倣行動などにおいても見られる。
講演で多賀氏は大脳皮質のモジュール化と、生得的な皮質下神経系の機能、それぞれのシステムがせめぎあいながら発達していくことでU字型発達が生まれるのではないかと述べた。赤ちゃんは例えば生後1カ月目と3カ月目では、違う仕組みで知覚を行なっているのかもしれないという。2つのシステムの発達は学習と生得性それぞれの発達過程としても結びつけることができるのではないかという。
現在は光トポグラフィーを使って、2カ月から4カ月の赤ちゃんの皮質の感覚野がどのように働いているのか調べているという。
 |
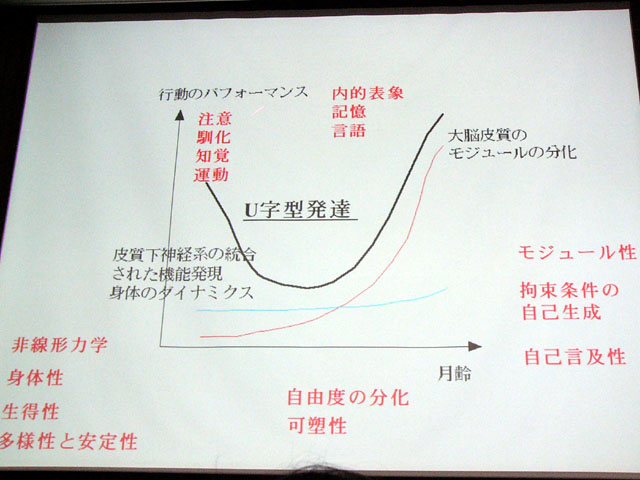 |
| 東京大学大学院教育学研究科 多賀厳太郎助教授 | 行動のパフォーマンスにおいてU字型発達があるという |
 |
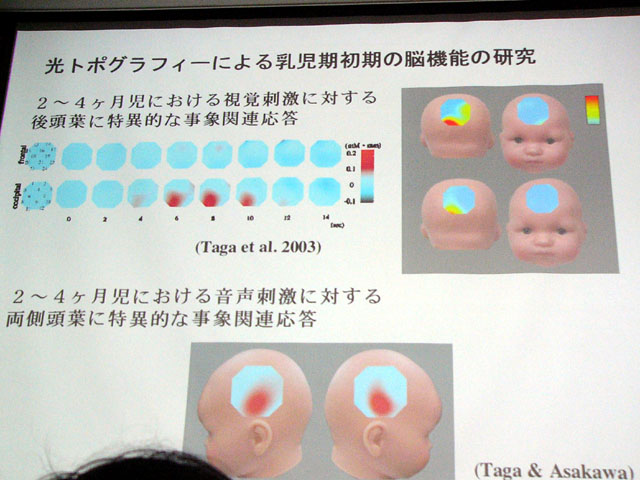 |
| 光トポグラフィーを使った乳幼児の脳機能イメージング研究の様子 | 2~4カ月でも皮質の機能分化が起きているらしいことを示す研究 |
●子どもからみたロボット、ロボットからみた子ども
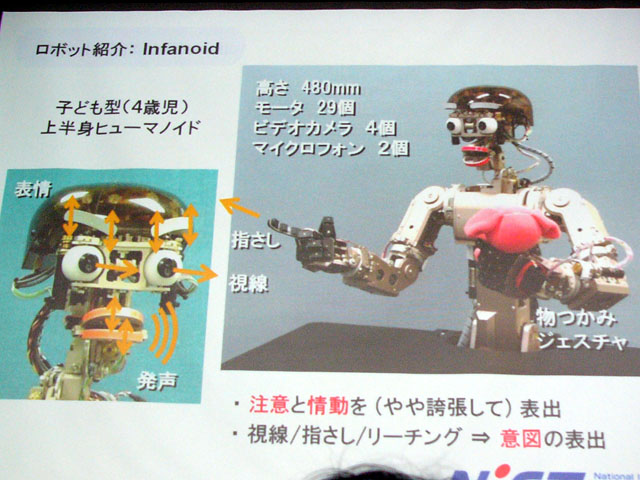
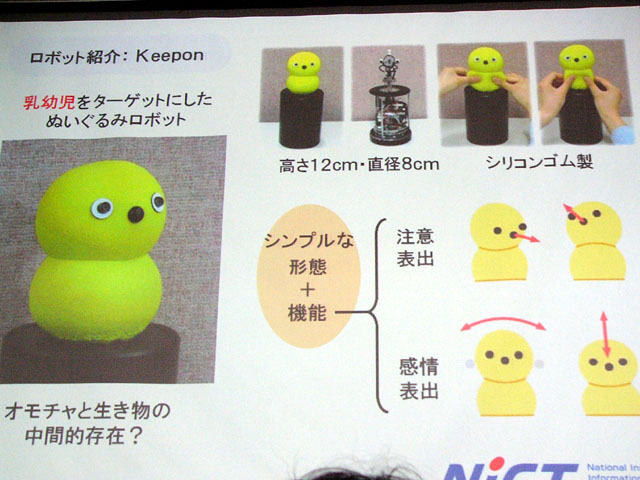
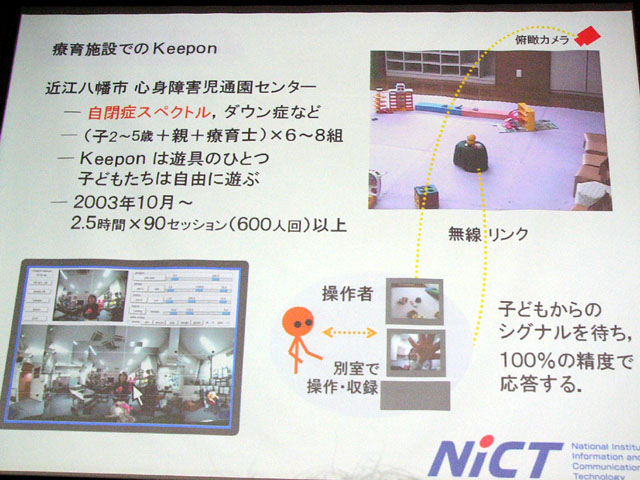
続けて、独立行政法人 情報通信研究機構 けいはんな情報通信融合研究センター主任研究員の小嶋秀樹氏が「子どもからみたロボット・ロボットからみた子ども──育ちと育ての現場からみたコミュニケーションの成り立ち」と題して講演を行なった。小嶋氏は「インファノイド」というコミュニケーションロボットで知られるが、講演ではそのほか「キーポン」、「テーロス」という2つのロボットと、それに対する子ども達、特に自閉症など発達障害を持つ子供たちとの長期にわたる接触実験の様子がビデオで示された。
特に「Keepon(キーポン)」の単純ながらユニークな動きと、それに対する子ども達の豊かな反応には会場から笑いがこぼれた。興味深いことに、人間とは目線を合わせない自閉症の子どもも、ロボットに対しては着目する傾向があったという。通常の状況下では情報の洪水にさらされ、有意味な情報が拾えない子ども達にとっても、ロボットは人間よりもはるかに単純で抽象化されており、予測が容易だからではないかというのが小嶋氏の考えだ。
小島氏は、コミュニケーションの成り立ちは、「対象への意味づけ」が他者のそれと交差することから始まるのではないかという。こういったものをロボットで実現するためには何が必要だろうか。どうすればロボットは「他者に対する想像力」を獲得し、人間との本当のコミュニケーションを実現できるのか、また子どもがどのようにこの能力を発達させていくのか、その発達の道筋を探りながら、発達障害に対してどのような支援が可能なのかなどといった視点で研究を進めているという。
 |
 |
 |
| (独)情報通信研究機構 けいはんな情報通信融合研究センター小嶋秀樹氏 | 上半身ヒューマノイド「Infanoid(インファノイド)」。アイコンタクトや共同注意の実験のためのロボット | インファノイドと子ども達のインタラクションの様子 |
 |
 |
| ぬいぐるみロボット「Keepon(キーポン)」 | 【動画】キーポンの動き(発表スライドを再撮) |
 |
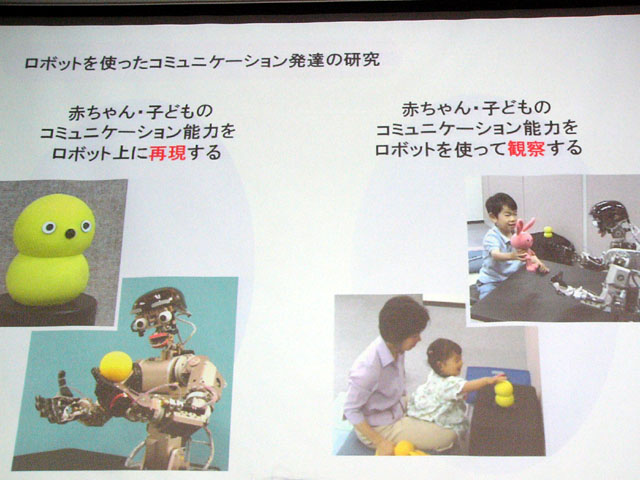 |
| キーポンのインタラクション実験 | 赤ちゃん・子どものコミュニケーション能力の再現や観察が研究目的 |
●人間型ロボットと乳幼児の「日常」インタラクションの研究
続けて、ソニー・インテリジェンス・ダイナミクス研究所リサーチャー、カリフォルニア大学サンディエゴ校客員研究員の田中文英氏による「人間型ロボットと乳幼児の日常インタラクションの研究~長期的な実地観察からの知見~」と題した講演が行なわれた。これはQRIOを2歳未満の子ども達がいる保育園に連れて行き、少し変わった「仲間」として子どもたちの間で生活させたとき、どういうことが起こるか調べたもの。実験は2005年3月から、一時中断を挟んで7月まで、長期間継続して行なわれた。なおロボットは完全自律ではなく、カメラを使って田中氏がある程度コントロールして調査を行なった。
講演では長期実験を通じて、ビデオからの主観評価や、ロボットがいる部屋への出入り回数変化、ロボット部位ごとのタッチ回数遷移、玩具ロボットとの違いなどさまざまな文脈・調査手法でロボットと幼児とのインタラクションの変化を幅広く調べた結果が示された。
面白いことに、最初はロボットが転倒すると子ども達は泣き出すことが多かったが、それがやがて倒れると助け起こそうとするようになり、さらには倒さないように気を付けるようになったという。大人から言われたからそうしたのではなく、子ども達は自然にそのような行動を示したそうだ。
さらにたまたまQRIOのバッテリが切れて寝てしまったときには、そばにいた子どもが毛布をかけてあげるという行動を示した。しかもこの行動は、ビデオの中から良いところを探し出したわけではなく、ごく自然に毎日起きていたそうだ。
実験においてはロボットだけではなく、単純な動かないトイロボットも一緒に置かれたが、子ども達からの扱いは全く違ったという。田中氏は「日常性の力はすごい。ルーティンを利用することが長期利用のインタラクションにおいては重要と考えられる」と述べた。
 |
 |
 |
| ソニー・インテリジェンス・ダイナミクス研究所リサーチャー田中文英氏 | 保育園でのインタラクション実験の様子 | さまざまな評価手法を用いて行動分析を行なった |
 |
 |
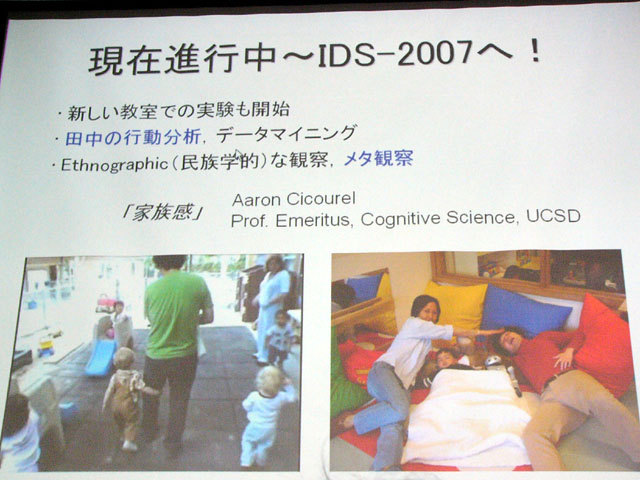 |
| QRIO転倒時の行動変化 | 子どもに毛布をかけてもらうQRIO | 現在も新しい研究が進行中 |
最後の講演は、ソニー・インテリジェンス・ダイナミクス研究所リサーチャー、株式会社 ATR脳情報研究所研究員の遠藤玄氏による「生物を規範とした二足歩行運動とその獲得」。従来のZMPベースではなく、CPGを使った二足歩行を実世界で実現したというもの。実際のデモは既に紹介済みである。
遠藤氏はもともと上述の多賀氏の研究と、電通大学生産情報システム学講座の木村浩助教授らの生物規範型制御による四足歩行ロボット「鉄犬」の研究に強く刺激を受けて始めたそうで、将来は設計者の意図を超えて、環境に対して自律的に適応して歩行パターンを変化させるような系を作り出すことが目標だという。
 |
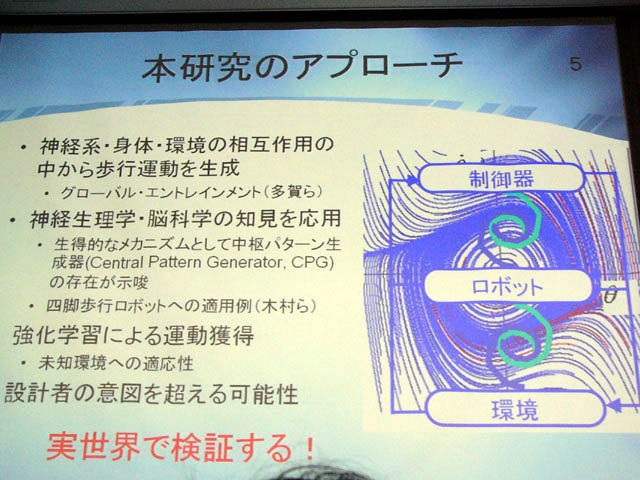 |
| ソニー・インテリジェンス・ダイナミクス研究所リサーチャー遠藤玄氏 | 研究アプローチ |
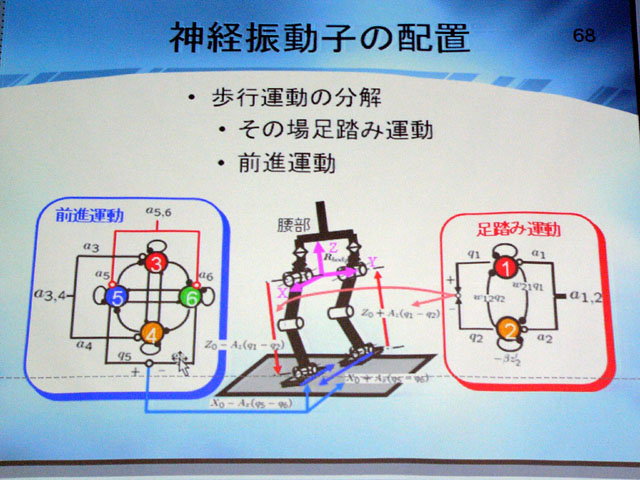 |
 |
| 2つの神経振動子を配置し強化学習を行なった | シミュレーションの様子 |
□ソニー・インテリジェンス・ダイナミクス研究所
http://www.sonyidl.jp/index.html
□関連記事
【2005年4月22日】【森山】人を飽きさせないロボットをつくる
~ソニー・インテリジェンス・ダイナミクス2005レポート
http://pc.watch.impress.co.jp/docs/2005/0422/kyokai35.htm
【2004年4月14日】【森山】ソニー・インテリジェント・ダイナミクス2004
~ロボットは脳の秘密に近づけるか?
http://pc.watch.impress.co.jp/docs/2004/0414/kyokai24.htm
(2006年4月27日)
[Reported by 森山和道]
【PC Watchホームページ】
PC Watch編集部 pc-watch-info@impress.co.jp ご質問に対して、個別にご回答はいたしません
Copyright (c) 2006 Impress Corporation, an Impress Group company. All rights reserved.