 |


■森山和道の「ヒトと機械の境界面」■2足歩行ロボットが自作できる
|
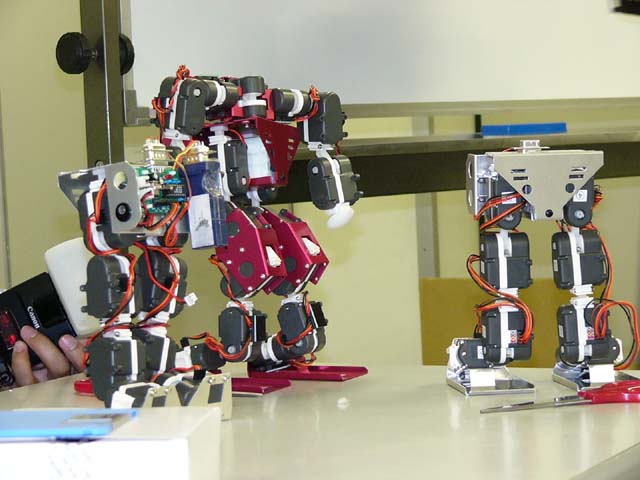 |
8月24日、猛暑のなか、秋葉原ダイドーホールにて2足歩行ロボットの組み立て講習会が行なわれた。主催/事務局は九十九電機ロボコンマガジン館。そのほか後援:ROBO-ONE 委員会、協力:株式会社ベストテクノロジー。ベストテクノロジーが発売している韓国製のAIモータを使い、RS-232C経由でPCから制御できる8軸のロボットを自作するというもの。このロボットを拡張すれば 「ROBO-ONE Jr.大会」にも参加可能だ。
今回は講習会としては2回目となる。税込84,000円を支払って参加した合計20組(+1組、合計21組)が2足歩行ロボット製作に取り組んだ。
■まずは組み立てから
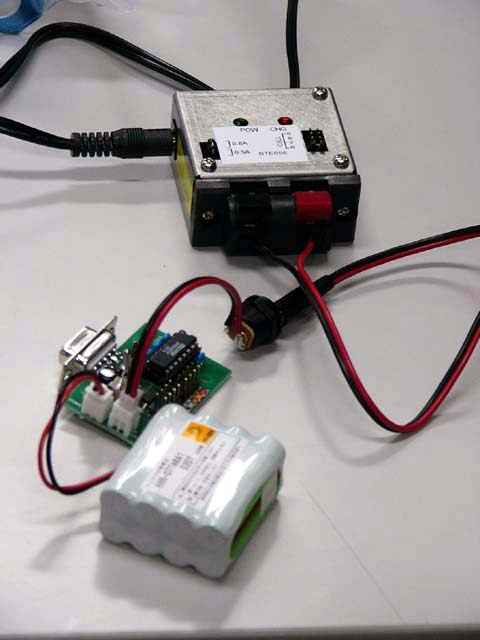
配布物の確認のあと、講習はバッテリの充電から始まった。I/F基板と電池を繋ぎ、充電器を繋ぐ。DCアダプタを介して充電。充電器のセル数を8にすることを忘れないように、コネクタ端子を逆に繋がないようにといった注意がベストテクノロジーの上光隆義氏から飛ぶ。
 |
 |
 |
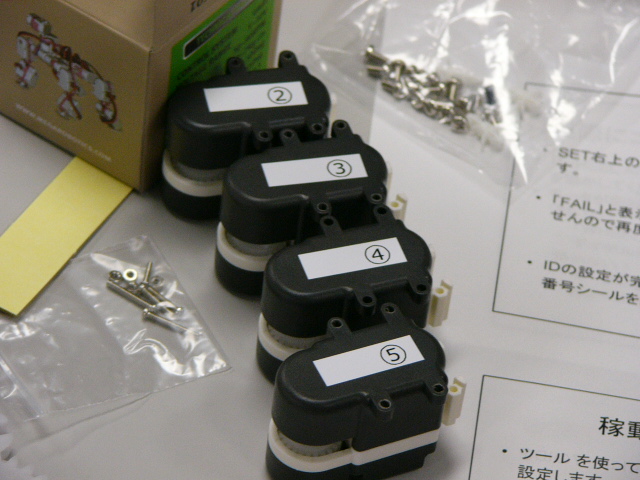
| 配布されたキット一式。AIモーター8つ、アルミフレームセット、バッテリ、基板、充電器セット、DCアダプタ、ドライバ、モーションプログラマやAI Motor Configuratorなどソフトの入ったCD-ROM、マニュアルなど | 講師は荒井貞博ツクモロボコンマガジン館店長 | 充電中のバッテリ |
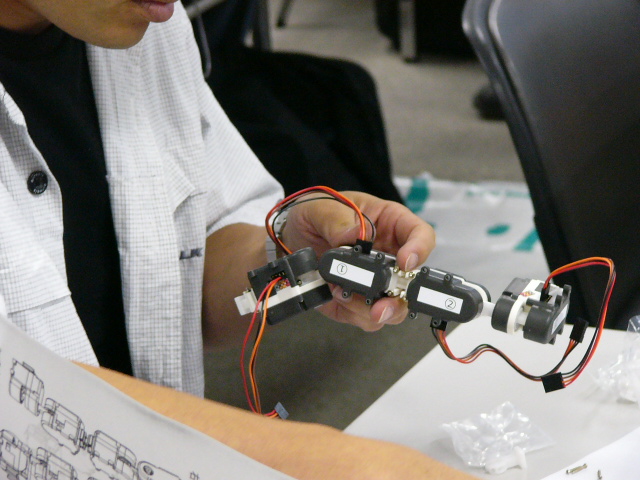
続けてAIモータの説明。AIモータは通常のサーボと違って連続回転が可能で4byteのデータで制御できる。ただし電流制限がある。また、モータ同士の配線ができ、1つのマイコン等からデイジーチェーンで複数のサーボモータを制御できるといった特徴がある。通常のラジコンサーボと違ってブラケットなどで固定することなく、ジョイントでモータ同士を組み合わせることができる点も大きな特徴だ。これによって簡単にモータを組み合わせるだけでロボットを組むことができるのだ。
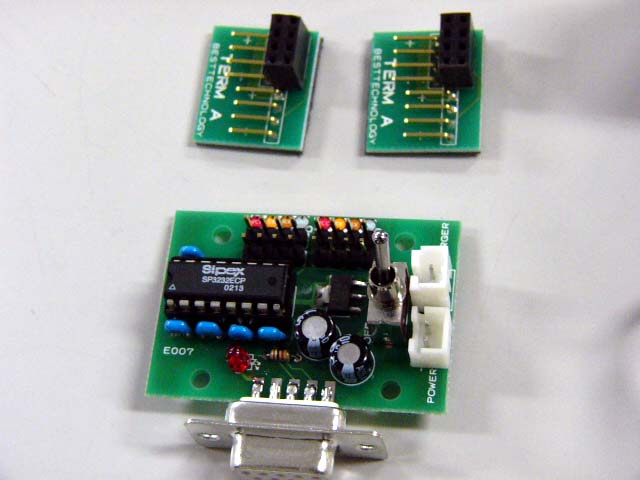
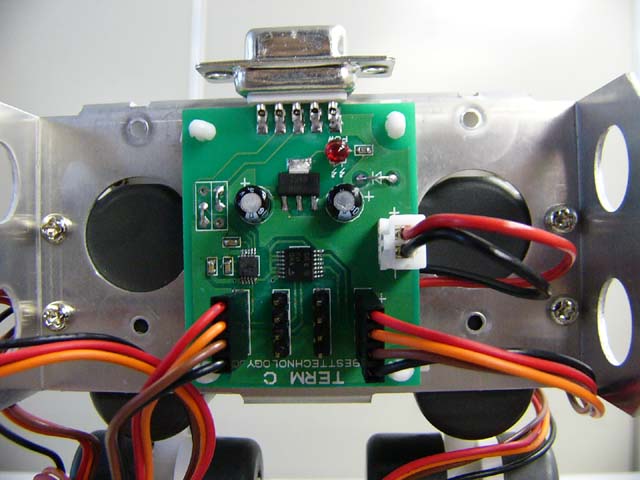
I/F基板はパソコンからのRS-232C信号をTTLレベルに変換する。今回のキットのメインの基板は、AIモーターを4個接続することができる。
 |
 |
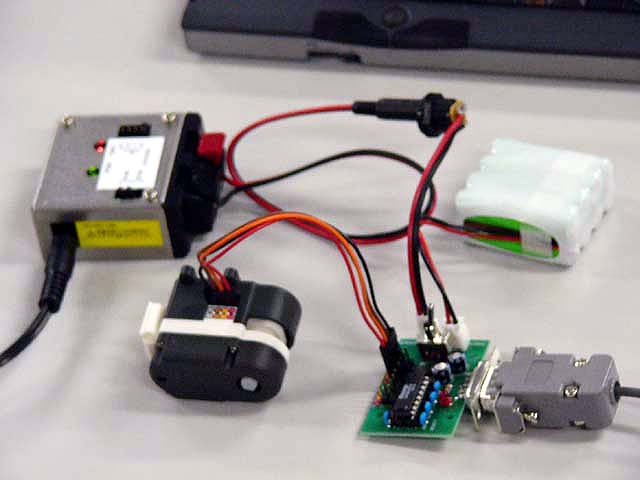 |
| AIモータと付属のジョイント等 | 基板。モータと基板は4芯ケーブルで接続する | モータを基板に繋ぎ、バッテリを接続 |
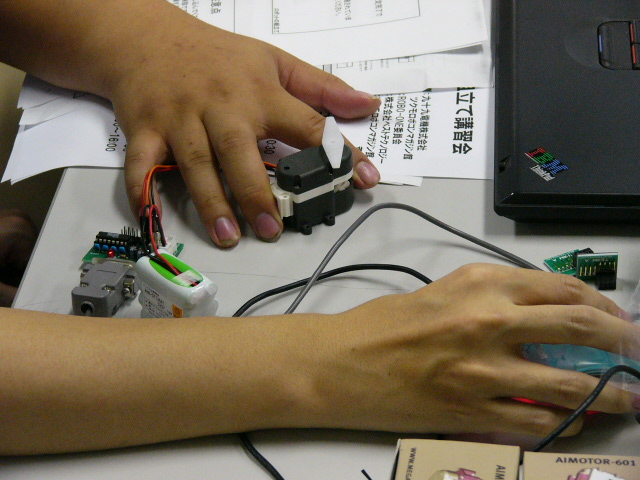 |
ソフトのインストール、通信ポートの確認後、モータを1つ1つ繋いで動作を確認し、AI Motor Configuratorを使って0~7までのID番号を割り振っていく。
モータがギュインギュインと音を立てて動き始めると、参加者の顔もほころんでくる。
ロボットを組み立てる前に、モーターは出力軸を合わせて初期位置を指定しておく。AIモータの場合は手で回してしまうか、Configurator上でポジションを指定する。これがあとでモーションを決めるときの基準、ホームポジションとなる。
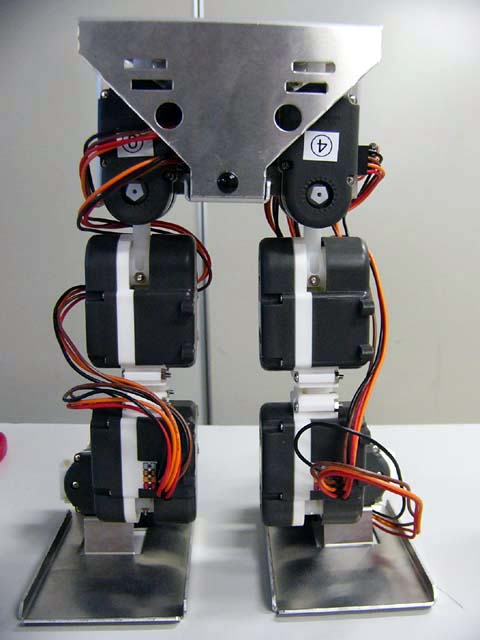
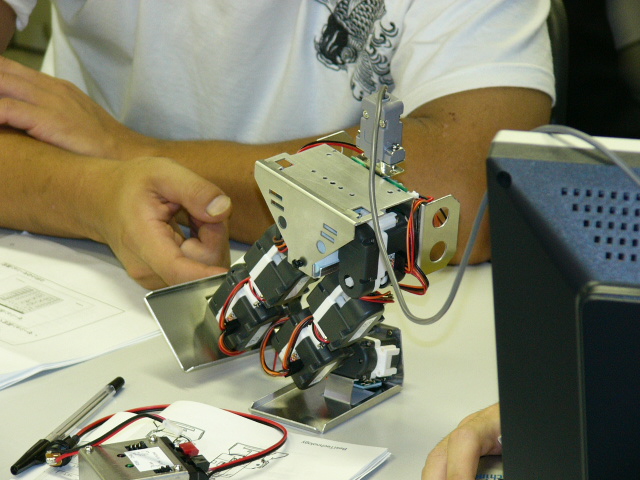
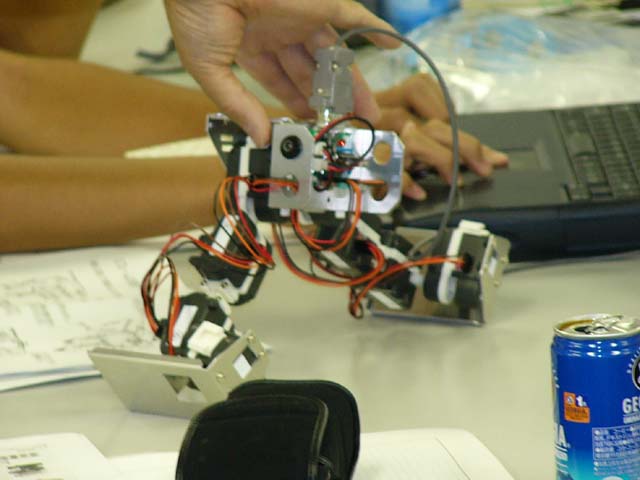
次はいよいよ組み立て。モータにジョイントを取り付け、モータを組み立て、フレームを取り付けていく。モータの向きに注意しておかないと、あとで困ったことになる。だが、おもちゃのように親切にできていないので、基板の形が説明書と違っているといったことに戸惑う人など、このへんから意外と手間取る参加者も出てきたが、昼食後の休憩時間中も早めに会場に戻ってきて組み立てを続けるなど、みな熱心に組み立てていく。
 |
 |
 |
| AI Motor Configurator | ID番号を振ったらシールを貼っておく | 組み立て。ロボットらしくなってきた |
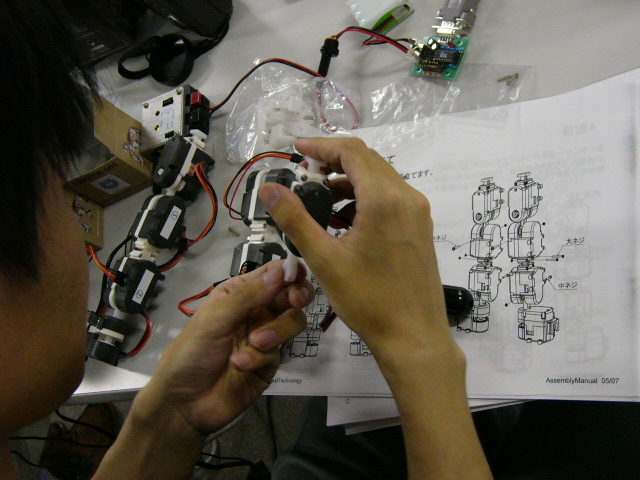
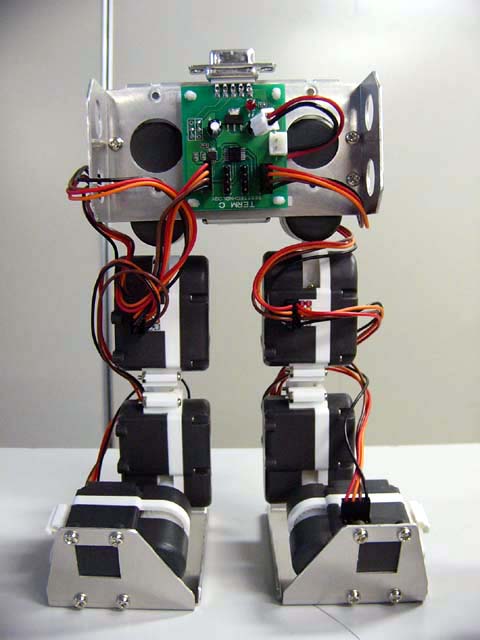
午後も組み立ての続きから始まる。両面テープを使って小基板を取り付け、配線していく。配線になると混乱する人続出で、完成品と何度も見比べながらの作業が続く。
 |
 |
| 説明書と比較しながら配線作業中 | フレームを組み付ける |
 |
 |
 |
 |
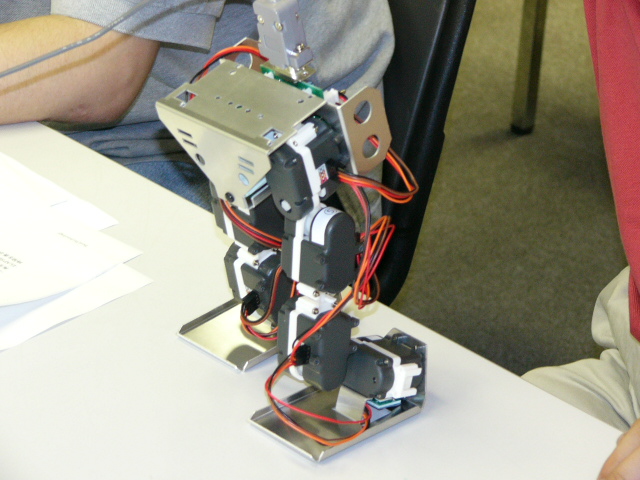
| ついに組み立て完了 | |||
■組み立て後はサーボの動き
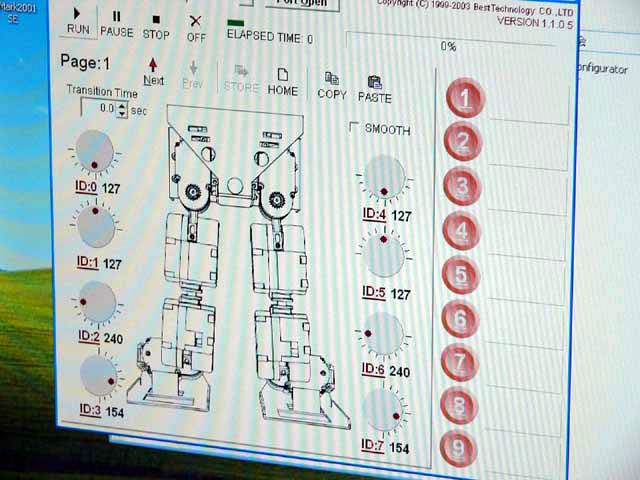 |
| モーションプログラマー。各関節の位置設定をし、モーションデータを作成・保存する |
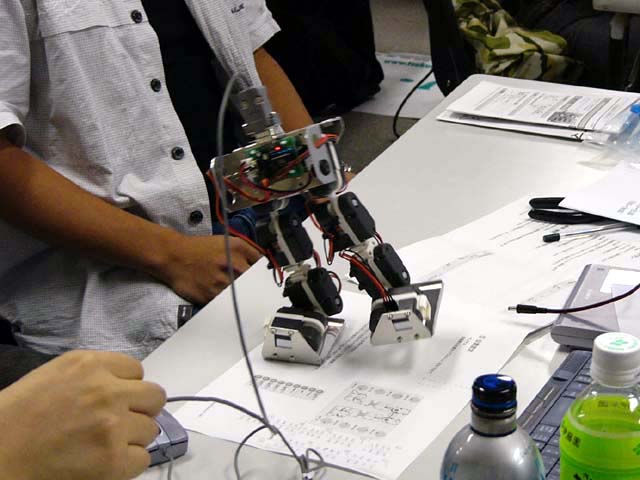
ここからが本番。モーションコントロールプログラムを起動して、動きを決めていく。モーターの動きを1つ1つ決めていき、一連の動作を作っていく。このソフトは9種類の動きを設定して記録させることができる。1つのモーションに登録できる動きは、20ステップまで。20の動きをパラパラマンガのように実行することで一連の動作とするのである。ROBO-ONEの人たちでも16ステップまでが普通だから、十分であるはず。それぞれの関節の位置を設定し、データを保存という作業を繰り返す。各ステップステップの間の時間を設定してスタートさせれば、取りあえずロボットが決めたモーションどおりに動く、というわけだ。
ここまでは、講師の説明よりも先走りながら組み立ての手を動かしていた参加者も多かったが(そのため部品を壊してしまった人もいたとか)、「サーボの制御」となるとハードルが高いのか、説明が終わってもおっかなびっくり気味の人が多く、なかなか手がつけられない。取りあえず、サンプルデータとして歩行モーションを読み込む。取りあえず大ざっぱな動きとして作ったものだが、曲がりなりにもロボットたちがあちこちのテーブルで動き始めた。
 |
 |
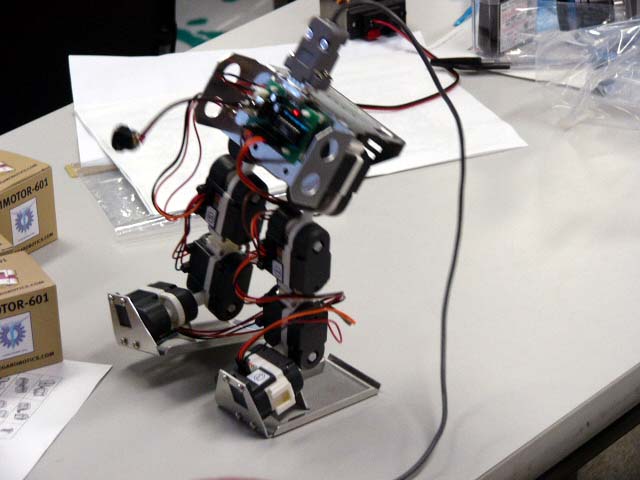 |
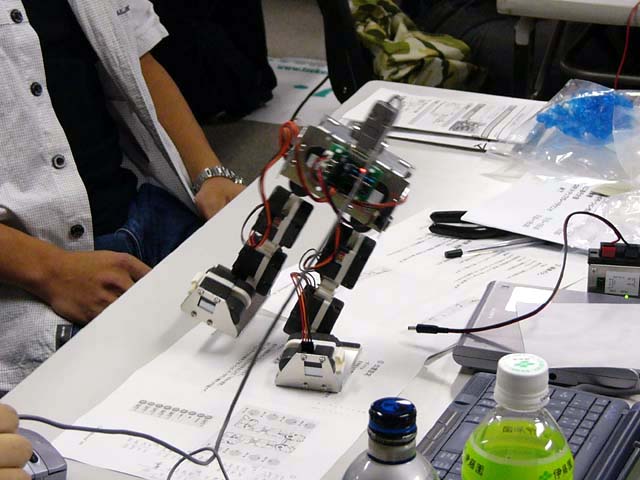
この動きをコピーして手直しをしたり、あるいは最初からモーションを組み立てていく。同時に、ロボットがあっちでバッタン、こっちでバッタンと音を立てて倒れる。ロボットには体重がある。一つの関節を動かすだけでは滑らかな重心移動はできない。足首と股間のサーボを同時に動かしてうまくバランスを取らないと転倒してしまう。基本的には、まず片足に重心を移してから、逆の足を遊脚として動かし、次に動かしたほうの足に重心を移し替えれば歩くのだが、今回の講習のロボットは片足4自由度で、膝がない。また、足裏も簡単に持ち上げられるわけでもない。工夫が必要となる。
 |
 |
 |
| モーション作成中の参加者たち。モーション作成中に片足を上げたままの状態にしていてもサーボが焼けたりしないのがAIモーターの利点 | ||
 |
 |
 |
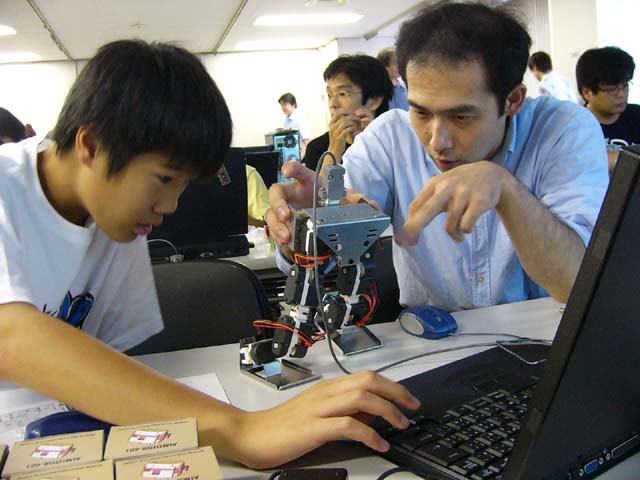
| 会場では、ROBO-ONE常連の山崎氏や坂本氏、ROBO-ONE実行委員長の西村氏もサポート | ||
■そして何とか
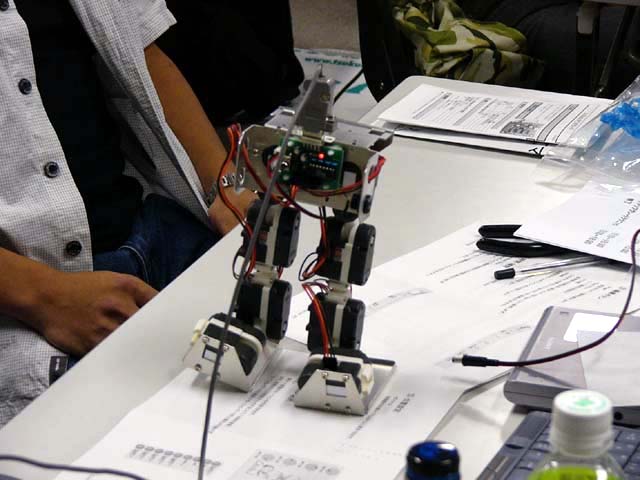
歩行モーションを1つ1つサーボの角度を決める方法で作っていくのはやはりなかなか難しく、かなりの参加者が苦戦。歩行、あるいは歩行らしき動きをするロボットは出たものの、残念ながら歩行大会は行なえなかった。だが、蹴りや起きあがりなどの動作に挑戦して、定刻までに完成させた挑戦者たちもいた。
 |
 |
| 映画「ベストキッド」をイメージしたという「蹴り」 | 開脚した状態からの起きあがり |
 |
 |
 |
| そしてもちろん、比較的うまい歩行を実現したグループも | ||
全ての参加者が講習の間に歩かせることに成功したわけではないが、ある程度の動きはできたし、どうすればいいかという指針もある程度は示された。参加者の満足度はそれなりに高かったようだ。
今回の参加者(申込者)の平均年齢は36才。夏休み中ということもあり家族連れの参加者もいたが、むしろ大人の夏休みという雰囲気だった。参加者のレベルもバラバラで、ROBO-ONEに出たいという人もいれば、ROBO-ONE大会のことを知らない参加者もいた。
また、モーションを作る上では一連の動作を各ステップの動きに分けることが必要だが「動作をステップで考える」ということそのものが、なかなか理解できない人もいたようだ。
いっぽう、Excelを使って動きを1つ1つ記録しながら作業している人もいた。作業のペース1つとってもかなりバラバラ。もともと1人で参加している人は3人組よりはどうしても遅くなる。今回は複数のサポートがいたためほぼ予定通りに進行したが、ロボット教室の難しさの一端を感じた。
だが、今後、ロボット教室は大きく広がり得る可能性もありうる。ロボットを制御するためにはどのみちPCを使う必要がある。もしかするとロボット教室は、学校の視聴覚教室など、PCが揃っている環境の新たな使い道となり得るかもしれない。
もし教育現場、たとえば高校などでロボット製作の授業が行なわれるようになれば、ロボットリテラシーは大幅に向上するし、ホビーロボットの裾野も大幅に広がる可能性がある。そんなことを夢想させるに足る講習会だった。果たして、ロボットはPCの新しいアプリケーションとなるのか? 今後が楽しみだ。
□九十九電機のホームページ
http://www.tsukumo.co.jp/
□ロボコンマガジン館のホームページ
http://www.rakuten.co.jp/tsukumo/
□ROBO-ONEのホームページ
http://www.robo-one.com/
□関連記事
【8月18日】【森山】第4回ROBO-ONE観戦記【ROBO-ONEジュニア・予選編】
http://pc.watch.impress.co.jp/docs/2003/0818/kyokai11.htm
【8月19日】【森山】第4回RROBO-ONE観戦記【本戦編】
http://pc.watch.impress.co.jp/docs/2003/0819/kyokai12.htm
【8月12日】九十九電機、二足歩行ロボット組み立て講習会を開催
http://pc.watch.impress.co.jp/docs/2003/0812/tsukumo.htm
【8月4日】おもちゃみらい博で「ROBO-ONEバンダイカップ」開催
http://pc.watch.impress.co.jp/docs/2003/0804/roboone.htm
(2003年8月25日)
[Reported by 森山和道]
【PC Watchホームページ】
PC Watch編集部 pc-watch-info@impress.co.jp 個別にご回答することはいたしかねます。
Copyright (c) 2003 Impress Corporation All rights reserved.