■森山和道の「ヒトと機械の境界面」■
社団法人自動車技術会が主催する「自動車技術展 人とくるまのテクノロジー展2010」内で、5月19日、自動車技術会エレクトロニクス部門委員会、同ITS部門委員会によって「ヒューマトロニクスII ~人と調和するクルマ・機械・コンピュータを目指して~」と題したフォーラムが行なわれた。
人とクルマ、機械、コンピューターによる相互作用は、今後ますます複雑化する。クルマのような動く機械は「安全」だけではなく、人に対して「安心感」と「信頼感」も与えなければならない。そのためには機械は人の意図を予測しなければならないが、同時に人もまた機械の意図を知らなければならない。これが「ヒューマトロニクスII」フォーラムのテーマだ。
開会挨拶を行なった首都大学東京教授の山口亨氏は「将来の機械と人との関わり方には2ステップある」と語った。ファーストステップは、まずはクルマをはじめとした機械が人を理解するというステップである。そしてセカンドステップは、そのクルマや機械がネットワークを作り、人をよりサポートできるような情報を呈示するというステップが考えられると述べた。今日のインターネット上では既に当たり前となっているネットワークサービスが、クルマのような自ら移動できるモビリティに、これまでよりもさらに実環境に密着した形で到来しようとしていることを念頭においた考え方だ。
 |  |
| 首都大学東京システムデザイン学部 教授 山口亨氏 | 司会をつとめた本田技術研究所の川合誠氏 |
フォーラムでは人と機械の調和、「インタラクション」に関するる群ロボティクス、アフォーダンス、ブレイン・マシーン・インターフェイス(BMI)、インタラクティブ・アートなどに関する最新の研究が5つ紹介された。既に実用化されている技術に比べるとまだ基礎的なレベルだが、将来の、より賢くなった機械と人の関係を考えるヒントとなるかもしれない。
また、機械と人の関係というとこれまでは、「人がいかに機械を制御するか」、「人の意図をどう伝えるべきか」という研究が多かった。だが自動制御技術が既に適用され始めた今日においては、逆に、「機械の意図」をいかにして人にスムーズに伝えればいいのか、そのために人の身体、知覚、心のアーキテクチャを知ろうという試みが盛んになりつつある。機械がより知的に、そしてより人に物理的に密着したかたちで動き始めることで、人工物である機械の研究開発も新しいフェーズに入りつつあるように思う。レポートする。
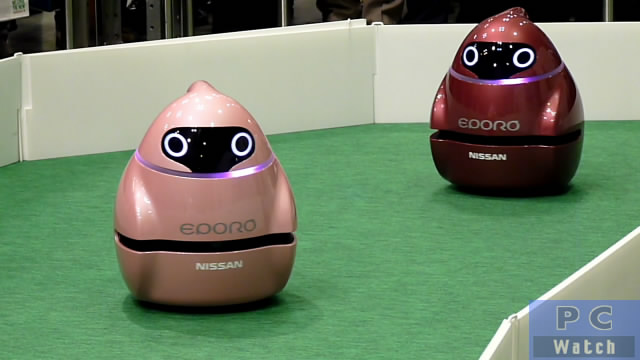
●図らずも個性を持った生き物のようなクルマロボット 魚群ルールで群走行する日産「EPORO」 |
| 日産自動車株式会社 総合研究所 モビリティ・サービス研究所主任研究員 安藤敏之氏 |
まず、日産自動車の安藤敏之氏が「魚群のルールで群走行するロボットカー「EPORO」 」と題して、「CEATEC JAPAN 2009」で公開されたロボットカー「EPORO」について解説した。EPOROはおおよそ45cm角、高さ60cm程度で重量13kg。ダルマのようなスタイルの移動ロボットである。レーザーレンジファインダーとUWB通信で周囲の環境を認識し、障害物を回避する。将来は技術を発展させていくことで、事故や渋滞を防ぐことができるという。
背景には日産の安全に対する考え方、「セイフティ・シールド」がある。自動車が通常運転から衝突に至るまでの過程を6段階に分け、それぞれの危険に対して最適なバリアを機能させることで事故から人を守るという安全技術のコンセプトである。運転状況に応じてさまざまなバリア機能を働かせることで、少しでも危険に近づけないようにサポートする。「EPORO」に関してはこの考え方を「群」に応用。群とロボットあるいはクルマが走行するときにどのように安全を確保するかという考え方で研究を進めたという。
背景にはEV(電気自動車)の普及がある。安藤氏はEVが普及すると、「走行環境のシフト」が起こりえると述べた。EVは排気ガスが出ないし、自由度の高い新しい動きができる。これまでクルマは、クルマのために整備された道路上を走ってたいた。そのため規定環境での安定した制御を目指していたが、排ガスが出ず自在なモビリティができるとなると、走行環境も変わる可能性が高い。将来は、人とクルマが混在した環境での走行も考えられる。人とEVが混在した複雑な環境でも柔軟な制御を実現するために、ロボットカーを使って研究しているという。
課題解決のアプローチには生態模倣を使っている。生物に学ぼうというわけだ。単体での安全性を考えた「BR23C」のときにはハチの動きを模倣した。それに対して「EPORO」は集団移動する魚群の動きの制御を真似ている。「生物に学ぶ」といっても生物の構造模倣ではなく、あくまで、対処方法を学んでいる。
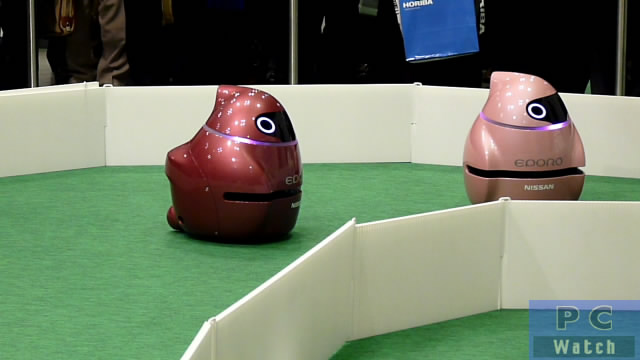
EPOROの「群れ」は、環境に応じて柔軟に形を変える「ゆるく繋がる」制御を行っている。安全な間隔を保って集団で走行しつつ、狭い道では一列になる。そして障害物があったら隊形を変え、群れを分割する。この動きは、魚の群れの3つのルールを使って実現したという。仲間にぶつからないように方向を変える、一定の距離を保ち速度を合わせる、離れすぎると近づこうとする、この3つである。それぞれの状態は、EPOROの首の色で、赤、白、青で表現されている。
魚は「側線」と「視覚」を使ってこの動きを実現しているわけだが、EPOROの場合はこれが距離を測距するレーザーレンジファインダー(LRF)とUWB通信にあたる。UWBも距離センサー兼状態交信のために使っている。カメラを使わなかった理由は、魚の視覚そのものがまだ良く分かっていないからだという。1台のEPOROにUWBが3台搭載されており、それぞれ測距することで、仲間の位置を決定する。また、それぞれのヨーレート状態を伝えており、これによって「EPORO」は、互いの回転角度などを把握している。自動車技術展では、実機によるデモンストレーションが行なわれていた。
 |
| 【動画】互いのヨーレートをUWBで通信しあうことで同じように回転するデモ |
 |
| 【動画】相手の顔を見るように回転するデモ |
研究開発を通じて、2つの気づきがあったという。1つ目は、計測機器のばらつきによって、機体ごとに個性が生じたこと。特に位置検出精度が30cm程度で周辺の通信環境によっても影響を受けるUWB通信ユニットのばらつきによって測距がずれ、それによって挙動が変わったそうだ。EPOROは全て同じ部品を使っており、ばらつきを抑えるように努力したものの、どうしてもバラつきが出てしまったのだそうで、「意図したものではなかったが、生物のルールを取り入れたら生き物らしくなった」という。
なおこれは今回、それぞれ目的が異なる一般車両の動きを想定して、「ゆるくつながる群れ」をコンセプトとしたことも影響していたようだ。だが物流のように「ゆるく」繋がる必要がない場合は、もっとかっちりした群制御のほうが良いかもしれないという。
もう1つは、衝突回避と群走行のトレードオフである。障害物を検出したときには回避しないといけない。だが、そうすると群れを割り、おいていかれる可能性が出てくる。自分の安全と群れの維持、このトレードオフである。今回はシミュレーションや実験によってEPOROの能力に応じた回避量を導出し、パラメータ設定を決めたという。
将来は「EPORO」の技術を応用し、ぶつからないクルマが群れのように行動する交通社会が実現するかもしれない。その時代にはクルマは、クルマ同士で連絡しあうだけではなく、ネットワーク化された、街全体のセンサーになるという見方を示した。現在のカーナビやITSでも「プローブカー」という概念は既にあり応用されているが、さらに将来は、画像情報を使うことで、クルマ自体が道路状況はもちろん、パーキングや店舗、観光地などの状況を配信するようになり、クルマは「人の流れ・動きが分かるセンサー」になるのではないかと述べた。なおEPOROの技術を使うことで渋滞そのものも10~15%程度改善可能であり、無駄な動きをしなくなることからエネルギー面でも効果がありそうだと見られているという。
 |
| 【動画】EPOROの走行デモ |
●クルマと「生態心理学」
 |
| 早稲田大学人間科学学術院 准教授 三嶋博之氏 |
早稲田大学人間科学学術院 准教授の三嶋博之氏は、「アフォーダンスとは何か:人とクルマの協調のための生態心理学」と題して、ギブソン(J. J. Gibson)が提唱した「アフォーダンス」や「生態心理学」の立場から人とクルマの関係について講演した。生態心理学の枠組みでは「意識」を環境との関係性で考え、我々は意識を向ける環境のなかで生きていると考える。互いが互いを定義する関係のなかで、人と環境を考えていく。
生態心理学では意識の向く先として「アフォーダンス」という概念を仮定する。アフォード(与える/提供する)という動詞から作られた言葉だ。そして環境を「アフォーダンス」の集合体と捉える。なかなか取っ付きにくい概念だが、進化論の言葉でいえばアフォーダンスは選択圧と同じようなもので、動物の行動を支える環境の生態学的な情報のことだという。
ギブソンの研究で有名なものに「オプティカルフロー(光学的流動)」がある。我々が空間を移動すると、それに応じて風景が流れていく。その風景の変化率、動きベクトルのことだ。オプティカルフローは自己の運動によって生じ、同時に自分の姿勢と環境を規定する。
普通の心理学では意味や価値は我々が与えるものだと考えるが、生態心理学では意味や価値は環境に既に存在しており、ただし発見されなければならないと考える。私たちはアフォーダンスを知覚しており、たとえば「食べる」という行為は「食べられるもの」があることで関係性が安定するのだという。
 |  |  |
| 生態心理学と「アフォーダンス」 | アフォーダンス | 食べるという行為とアフォーダンス |
さてこのような考え方がどのようにクルマと関わるのか。機械は分析的に観測し要素を制御している。三嶋氏は「オートクルーズコントロール(ACC)のパラドックス」という例を示した。ACCは、車間距離と加速度変化の観測値をもとにクルマを安全・快適に制御する技術だ。いっぽう、熟練ドライバーは経験に基づいてクルマを制御する。ACCが先行車の減速に伴って自車の減速をした場合、たとえ「安全」ではあっても搭乗者に対して怖い印象を与えてしまうことがあるかもしれない。いっぽう熟練者の運転であれば搭乗者は恐怖は感じないだろう。つまり「安全」と「安心」はズレていることがある。
生物は、ある基準を使って物体の接近、あるいは自分の制動をコントロールしている。環境表面の肌理の拡大率の逆数、光学的τ(タウ)が関係しており、τの変化率(タウ・ドット)が0.5になるようにすると、減速しつつ、対象の表面でぴたりと止まることができるのだそうだ。プロのドライバーはタウ・ドット=0.5で車を制御する。猛禽類が獲物を捕らえたり、ハチドリが花に対してぴたりと静止して蜜を吸ったりするときもタウドットが0.5になるように行動しているのだという。
ただ生態学的に妥当な情報の特定は途上段階にあるという。三嶋氏は私たちにとって「意味のある距離感」は複雑であり、そのような変数を探して行くことが重要だと述べた。
つまり、クルマのセンシングデータと人間の知覚情報は必ずしも同じではなく、クルマ(機械)が見ている世界と、人が見ている世界にはズレがあり、それを感覚的に合わせ込む必要がある。もちろん、クルマはクルマなりの情報を使うことで車体を制御することで安全性を確保することもできるのだが、それと同時に、人間とクルマが協調するためには、同じ情報を使って同じ世界を共有することもまた重要だと述べた。
 |  |  |
| 安全と安心のズレ | 光学的タウ | 人とクルマの協調 |
●機械の意図を人に伝えるには
 |
| 東北大学大学院工学研究科バイオロボティクス専攻 小菅一弘教授 |
東北大学大学院工学研究科バイオロボティクス専攻の小菅一弘教授は「人と協調する知能機械」と題して、小菅研究室でのこれまでのロボット研究、特に複数ロボットでの協調搬送、それらを応用した「ダンスパートナーロボット」の開発の話題を紹介した。小菅教授は「人工物は役に立ってナンボ。最後はモノにしてやろうと思って研究しているが、なかなか難しい」と語って講演を始めた。
協調搬送とは、複数台の移動ロボットを使ってものを運ぶ研究課題である。移動ロボットが床を移動すると車輪と床面が滑ることで目標とした軌道とはズレが生じる。それを腕の力センサー等を使うことで修正し、うまく運んで行くのである。協調搬送の研究はその後、大きなヒューマノイド型の「ロボットヘルパー」を経て、クルマを移動できる大型のロボット「iCART」の共同研究へと発展している。
 |
| 【動画】2台のロボットによる協調搬送 |
 |
| 【動画】iCART |
だが、これで本当に役に立つのか。ロボットは簡単な作業はできても一般的な作業はできない。ロボットが本当に役立つ作業できるようにするには、自分がやっている仕事、人の意図、そして人がどう助けてもらいたいのか把握しなければならない。
そこで人の意図を把握してタスクを行なうロボットとして研究開発を始めたのが社交ダンスを踊るパートナーロボットだった。愛知万博に出展されたロボットである。社交ダンスをタスクにしたのは、男性がリードし、動くだけでタスクをこなすことができるからであり、人との直接接触を伴うからだ。またダンスには足運びのパターンがある。こう出されたら次はこう、という文法のようなものがあるのだ。
ダンス教室に学生が通い、教室の先生に指導してもらって、ワルツならば基本のなかでもさらに基本的な5つの動作を行なえばなんとか踊りらしくみえると分かった。モーションキャプチャを使って人の動きの時系列データを取り、それを隠れマルコフモデルを使ってモデル化し、ステップが変わる前からの遷移を使って予測することで、人のステップに合わせて動けるようになった。愛知万博に出展されたロボットはグッドデザイン賞も獲得した。
今後は、よりニーズの高い、男性型のダンスパートナーロボットの開発を進める予定があるという。上述のように社交ダンスでは男性がリードを行なう。ダンスのルールに従って動くための軌跡を生成することはできたが、これからの問題は、ロボットの意図をどのように人に伝えるか、働きかけるかだ。また感情的な行動をいかに実装するかも今後の課題だという。こういった問題は今後の知的なクルマの制御においても同じ課題となりそうだ。
 |  |  |
| ダンスパートナーロボットのアーキテクチャ | 遷移前のデータを使って次のステップを予測する | ダンスパートナーロボットはグッドデザインを獲得した |
●考えるだけで機械を動かす「BMI」
 |
| 本田技術研究所 基礎技術研究センター主任研究員・マネージャー 岡部達哉氏 |
本田技術研究所 基礎技術研究センター主任研究員・マネージャーの岡部達哉氏は「考えるだけで機械を動かすBrain Machine Interface技術」と題し、2009年に発表された、脳と機械を直接繋ぐBMI(Brain Machine Interface)技術によってASIMOを動かす、という研究について紹介した。事前に決められた4つの動作のなかから、ユーザーが選んだ動作を弁別してASIMOが実行するというものだ。平均正答率は90.6%で、世界一の性能であると報道発表された。
かつてSFに過ぎなかったBMI技術は、'70年代~'80年代の脳科学研究の進歩、コンピュータの技術進化、そして研究の必要性が認められるようになったことから、'90年頃から研究が始まり、2000年以降、一気に研究成果が発表されるようになった。国内ではホンダ、トヨタ、電通大などで、脳活動計測によってロボットや電動車椅子を動かす研究が進められている。BMIのポイントは3つ。脳活動計測、得たデータの信号処理と弁別、そして機械へと送って操作するところである。
ホンダでは、日常生活で使えるBMI技術を目指しているという。そのため、計測には手術などをしない非侵襲脳計測で、リアルタイム計測、可搬型とするために、計測方法には血流の変化を計測するNIRS(近赤外線光計測)、脳から漏れ出てくる電位の変化を捉えるEEG(脳波)を組み合わせて「EEG-NIRSリアルタイム同時計測システム」を構築して使っている。脳波計はオランダ製、NIRSは島津製作所製だ。このシステムは単に各計測システムを組み合わせたわけではなく、1/1,000秒単位で計測される両者のデータをリアルタイムで時間遅れなく処理できるように工夫されており、記者会見時には、綺麗にパッケージされた形で披露された。
 |  |  |
| BMIの基本的な流れ | EEG-NIRSリアルタイム同時計測システム | |
ノイズを取り除く信号処理においては非常に単純な処理しかしていないという。パラメータ調整も実際に実験を行ない、最高性能を出したものを使うという形をとった。ポイントは弁別器にある。これにはATR脳情報研究所の山下宙人研究員らがfMRIのデータを解析するために開発した「スパースロジスティック回帰(Sparse Logistic Regretion、SLR)」というパターン判別手法を用いている。SLRは脳計測を行なったデータのように特徴量が多い高次元のデータを圧縮し、判別に使える特徴量だけを取り出すことができるため汎化性が高いという特徴を持つ。この弁別器を使うと、入力されたデータの、弁別面からの距離確率が出てくる。要するに、ユーザーが何を思い浮かべたのか、ある確率をもって区別することができるわけだ。
記者会見のときに公開された動画(WMV形式)では、ASIMOが「間違いないと思います」と腕を上げるものしか示されたなかったが、実際にはASIMOへ送られるコマンドも、判別の信頼度に合わせて、「間違いないと思います」、「たぶん合っていると思います」、「ちょっと自信がありませんが」とそれぞれ違うものを用意していたという。また、弁別器の性能は、記者会見後にデータを取ったところ、おおよそ100セッション程度の学習を事前に行なわせると安定することが分かったという。
今後は、さらに小型化し、判別性能をあげていくことを目指す。「EEG Brain Mapping」と呼ばれる研究が進み、脳波が脳のどこから来たものなのかが分かるようになれば、今後性能が上がる可能性があるという。
 |  |  |
| EEGとNIRSの生データ。これを見ただけで弁別できる人はいない。そこで信号処理技術、弁別器が必要になる | SLRという弁別器でパターン判別し、弁別面からの確率を計算 | EEGとNIRSそれぞれのデータを使って信頼性をあげている |
●文化をコンピューティングする
 |
| 京都大学学術情報メディアセンター教授 土佐尚子氏 |
京都大学学術情報メディアセンター教授の土佐尚子氏は「カルチュラルコンピューティング -文化・無意識・ソフトウェアの想像力-」と題し、クルマと人の間のインターフェイスについてインタラクティブアートや文化の観点から講演した。日本文化のコンピューティングを目指しているという。
土佐氏は、文化や芸術とコンピューティングを融合する「カルチュラルコンピューティング」のコンセプトをまず解説した。これまでは文化や芸術のコンピューティングといっても、計測したり分析したりなど、いわば表層的な部分に留まっていたと指摘。それはそれで重要だが、それ以上に、文化の根底にある精神的な部分をモデル化し、コンピュータで扱う対象とすべきではないかと考えているという。
文化の構造を考えて来た学問としては文化人類学がある。そこをさらに踏み込んでコンピューターで扱おうというわけだ。たとえば日本文化には「カタ」がある。それをコンピューティングすることで、精神態な部分にも触れられるのではないかと考えているという。
技術と文化の関係は互いに相補的でもある。奈良の大仏は、建立された時代には最新技術が駆使されていたに違いない。技術の成果が世に出されることで文化が変化し、それによってまた新技術が生み出される。するとまた文化が変化する。文化と技術はいわば二重の螺旋のような関係にある。
土佐氏は具体的な研究の例として、日本古来の「襲(かさね)」の色目や「文様」の画像を、任意の画像から選択して生成するアプリケーションや、「i.plot」という入力した単語群から似たような言葉を「場の空気」として呈示するアプリケーションなどを示した。言葉と言葉の関係性を視覚化したものだ。また、独自の視点を持つ山水画を誰でも描けるように要素をアイコン化して任意の場所に置くだけで絵が出来る「Sansui Ink Painting」、「ZENetic Computer」なども紹介された。山水画を描きながらユーザーはそのなかを旅して行くことで自己を探求するというコンセプトだ。
文化や芸術と言われているものにも構造があるのだ。それを既にメディアとなっているコンピューターで扱えるようにすれば、国や文化を超えたコミュニケーションのツールとすることもできるし、人間を理解するための一助とすることもできる。
クルマにおいても「漢字」をアイコンに使うなど日本文化を構造的に見て扱うようにすれば、社会への文化情報発信になるのではないかと述べた。その他にもさまざまなアイデアが土佐氏にはあるようで、講演後も筆者に、言葉を2つ選ぶだけで俳句を自動生成するアプリケーション「Hitch Haiku」のデモなどを直接見せてくれた。
 |  |  |
| 日本文化のコンピューティングを支える要素 | 「襲(かさね)」の色目と文様をデザインに適用する | 山水画をコンピューティングする |
日常、PCやHDDレコーダーやゲーム機を使っているときでも「この機械、何をしてるんだろうか、何をしようとしているんだろうか」と思うことはある。じっとしているだけの機械なら取りあえず待っていればいいのだが、クルマやロボットのように自ら、時には人間を乗せた状態で動くような機械の場合は、機械が自らの特性や目的--すなわちどのくらいの速度でどこへ行って何をしようとしているのか、どのくらいの精度で動いて止まれるのかを周囲あるいは内部の人間に速やかに、しかも直感的な方法で伝えなければならない。そのためにはこれまでの工学的な枠組みを、人間存在そのものへも広げる必要がある。この分野の研究は今後ますます盛んになると考えられる。