 |


■石井英男のDigital Life■夢の二足歩行ロボットキット「KHR-1」徹底レビュー(第4回)
|
前回の番外編からしばらく間があいてしまったが、その間に、KHR-1用の新たなオプションがいくつか登場した。また、KHR-1を動かしていると、特定のサーボモーターの動きがおかしくなってくることがあるが、そうした場合は、サーボギヤが欠けてしまっていることが多い。
そこで今回は、KHR-1のサーボギヤの交換方法と、KHR-1をさらにパワーアップしてくれるオプションを紹介していくことにしたい。
●サーボの調子が悪くなったらギヤの交換を
筆者は、前回の番外編でレポートした「ロボゴング大阪1」に続いて、5月8日に日本橋でんでんタウンのインデペンデンスシアター2ndで開催された「ロボファイト大阪1」にも参加してきた。ロボゴング大阪1では、1回戦負けというさんざんな結果に終わったが、ロボファイト大阪1では、念願の初勝利を挙げ、2回戦に進むことができた。
2回戦では残念ながら負けてしまったのだが、少しは進歩したかなと思っている。ロボファイト大阪1の詳細なレポートはここでは省かせていただくが(というか、全体をきちんと見ていないので)、1カ月前のロボゴングに比べて、参加者のレベルが大きく上がっていると感じた。オリジナルのフレームを使って、腰にヨー軸(回転軸)を追加したロボットも登場し、ノーマルのKHR-1では不可能なモーションを実現していた。
ロボファイト大阪1では、最後に参加ロボットを2チームに分けてバトルを行なう「バトルカオス」というイベントが行なわれたのだが、このときに、筆者は調子に乗って、両手を広げて相手に倒れ込む浴びせ倒しモーションを多発してしまった。
その後、東京に帰って、KHR-1を歩かせてみたところ、キリキリという嫌な音が聞こえる。HeartToHeartを利用して、サーボを1つずつ動かして調べたところ、右肩(CH7)のサーボの動きがおかしく、異音もこのサーボから出ていることがわかった。電源を入れていない状態で、手でサーボを動かしても、明らかに感触が異なる。こうしたサーボの不具合は、中のギヤが破損してしまったために起こる。
KHR-1では、KRS-784ICS(初期のタイプ、以下KRS-784)またはKRS-786ICS-Red Version(現行ロット、以下KRS-786)という近藤科学製サーボモーターが使われている。KRS-784/786ではコストダウンのために樹脂製ギヤが採用されているので、金属製ギヤを採用しているKRS-2350ICS-Red Versionなどの上位製品に比べると、ギヤの耐久性が劣り、強い衝撃が加わるとギヤの歯が欠けてしまう。また、倒れ込むような動作をさせていない場合でも、長時間使っていると、だんだん歯が削れてきて、ギヤの遊びが大きくなってくるようだ。
そうしたサーボも、ギヤを交換すれば、また元通りに動くようになる。KRS-784/786用の交換ギヤセットは4枚1組で315円と比較的安いので、ギヤ破損に備えて数セット購入しておくとよいだろう。特に、ロボゴングやロボファイトなどの、ロボットバトルに出ると、ギヤの消耗が激しい。なお、近日中にKRS-784/786用の金属製ギヤが登場する予定だ。この金属製ギヤは、4段あるギヤのうち2段目と3段目を交換して使うもので、耐久性の大幅な向上が期待できる。
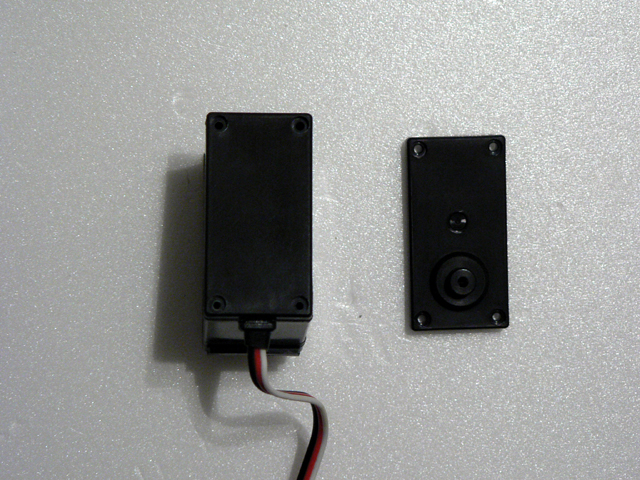
KRS-784/786のギヤの交換の手順も、それほど難しくはない。まず、サーボケースを固定している4本のケースビスを外して、サーボケースを2つに分離する。中に4つのギヤがあるので、全て取り外す。ケース内部にギヤの小さな破片が残っていることがあるので、綿棒などを使ってきれいに取り除いておくこと。ギヤの破片が残っていると、ギヤを新品に交換しても、その破片が歯に挟まって、またすぐギヤが壊れてしまう原因になる。ギヤは4つとも1度に交換し、歯に樹脂製ギヤ用のグリスを塗っておく。筆者は、田宮模型のセラミックグリスを利用した。
再び、元通りにサーボケースを合体させて、ケースビスで固定すれば完了だ。筆者のKHR-1の右肩サーボのギヤは、歯がかなり欠けてしまい無惨な状況であった。これではまともに動くわけがない。ギヤを交換したところ、また元通り動くようになった。
 |
 |
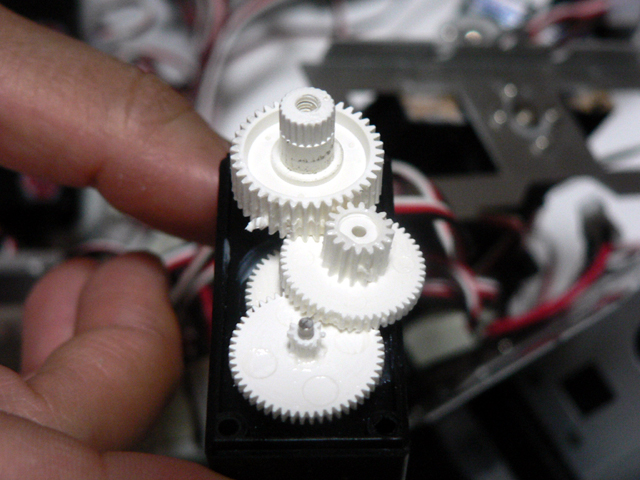 |
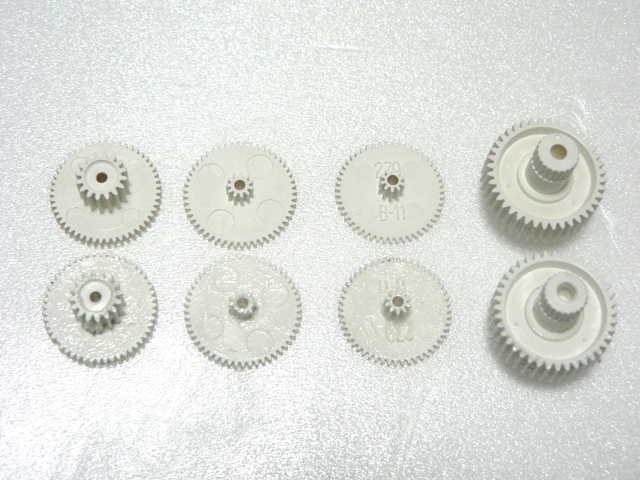
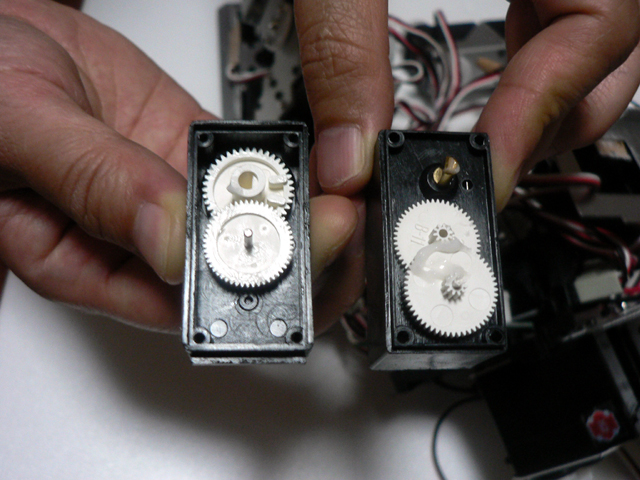
| KHR-1に使われているサーボモーターKRS-784/786用交換ギヤ。1組315円で販売されている | KRS-784/786では4枚のギヤが利用されている。交換する際には、4枚のギヤを全て1度に交換する | 調子のおかしかった右肩のサーボのケースをあけたところ。どのギヤも歯がかなりぼろぼろになっている |
 |
 |
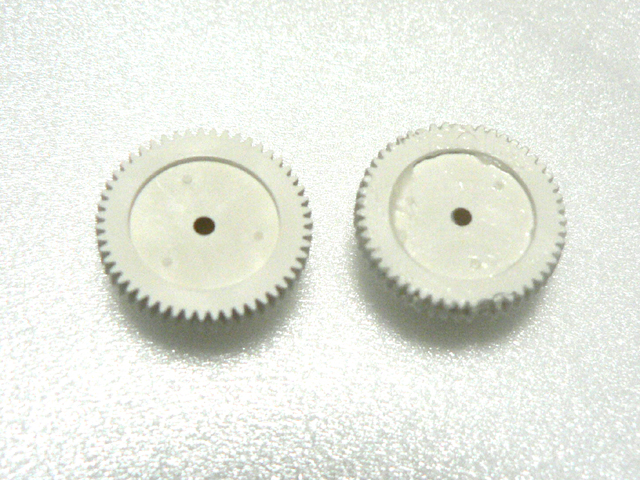 |
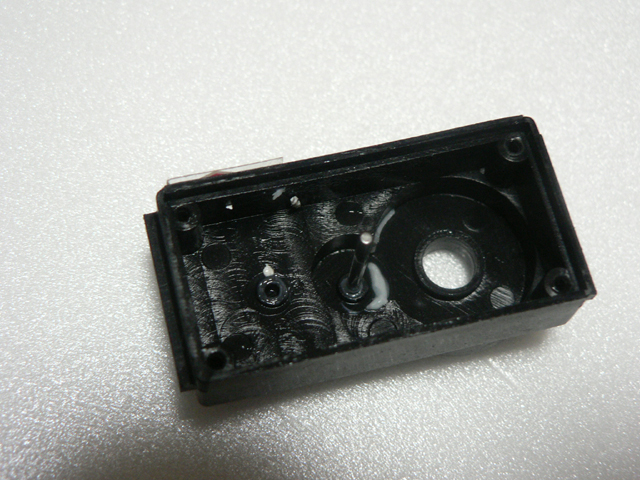
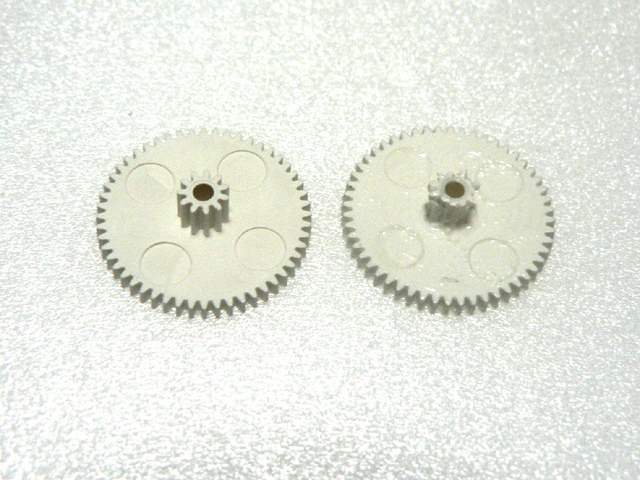
| サーボケースの内側。よく見ると、ギヤの破片が付着している。破片はきれいに取り除いておくこと | 左が新品のギヤ。右が使用後のギヤ。上部の歯がほとんど欠けてしまっている | 同じく左が新品のギヤ。右が使用後のギヤ。歯がかなり摩耗しており、手前の部分の歯は完全に欠けてしまっている |
 |
 |
 |
| 上の4つが新品のギヤ。下の4つが使用後のギヤ。使用後のギヤは全体的に歯がなまってしまっている | 田宮模型のセラミックグリス。樹脂製ギヤに適したグリスだ | 新しいギヤに交換して、歯のかみ合わせ部分にグリスを塗る |
以前から予告していたジャイロセンサーだが、ようやく筆者のKHR-1に組み込むことができたので、紹介したい。
ジャイロセンサーとは、角速度を検出するためのセンサーである。近藤科学が発売しているジャイロセンサーユニット「KRG-2」は、ロボット用に最適化されたジャイロセンサーで、ロボットに組み込むことで、姿勢の安定化に大きな効果を発揮する。
KRG-2は、長辺方向を回転軸とする角速度を検出でき、出力が2系統あるため、1つで2個のサーボに接続可能だ。ケーブルを逆向きに接続して1つ壊してしまったため、カバーを開けてみたところ、村田製作所の圧電振動ジャイロが使われているようだ。圧電振動ジャイロは、振動している圧電素子(圧電セラミックス)に生じるコリオリ力を利用して角速度を検出するもので、小型軽量かつ信頼性が高いことが特徴だ。
KRG-2は、コントロールボードとサーボモーターの間に入れて使うように設計されており、ある方向に角速度が加わった場合に、それを打ち消す方向に自動的にサーボを動かすことができる。ジャイロセンサーがないと、平らな床では歩けていたモーションでも、床に細かな凹凸があったり、少し傾いたりしただけで倒れてしまうが、ジャイロセンサーを搭載すれば、自動的に補正を行なってくれるので、不整地での安定性が大きく向上する。
外乱に対するシステムの耐性をロバスト性(頑健性)と呼ぶが、ジャイロセンサーによって、ロボットのロバスト性が高まるのだ。ジャイロセンサーは、ロボットバトル時においても大きな効果を発揮する。パンチなどである程度の力を受けても、倒れないように自動的にサーボが動くので、ダウンしにくくなる。
 |
 |
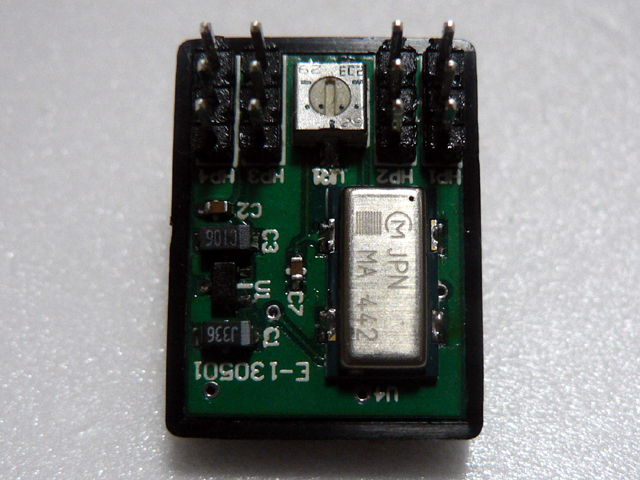 |
| ジャイロセンサーユニット「KRG-2」。接続用ケーブルが2本付属している | 右のSDメモリーカードとサイズを比べてみればわかるように、非常にコンパクトだ | カバーを開けて中を見てみたところ。右下の長方形のパーツが、村田製作所の圧電振動ジャイロだ。中央上部にはゲイン(感度)調整用VRが用意されている |
KRG-2は、1つで前後方向の傾き(ピッチ軸)あるいは左右方向の傾き(ロール軸)のどちらかの補正が可能だが、2つ搭載すれば、前後方向と左右方向の両方の補正が可能になる。前後方向だけでもかなりの効果があるが、せっかくなのでKRG-2を2つ搭載し、前後方向と左右方向の2軸の補正を行なわせることにした。
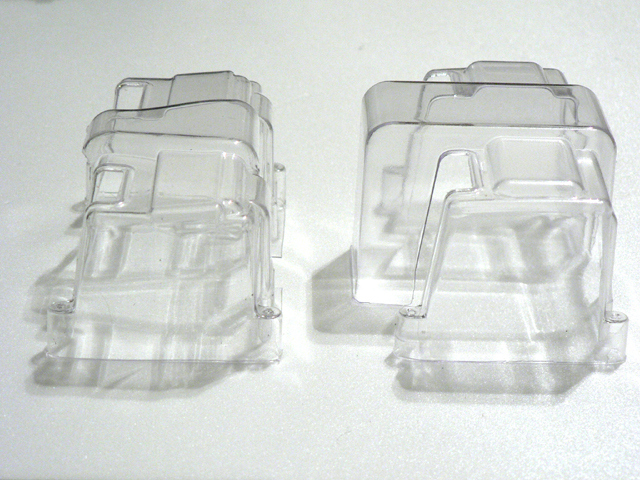
KRG-2は、SDメモリーカードとほぼ同じサイズで、かなりコンパクトなのだが、標準のボードカバーの中に組み込もうとすると、スペース的にやや窮屈だ(特に2つ搭載するのは難しい)。そこで、新たに発売されたラージサイズのボードカバー(3,675円)を利用することにした。ラージサイズのボードカバーは、標準のボードカバーに比べて、1回りほど大きく、KRG-2や無線コントロールユニットの受信機を組み込むためのスペースが十分に確保されている。
 |
 |
| ラージサイズのボードカバーセット | ボードカバーセットには、ネジやボードベースが含まれている。ボードカバーの不要部分はカッターなどを使って切り取る必要がある |
 |
 |
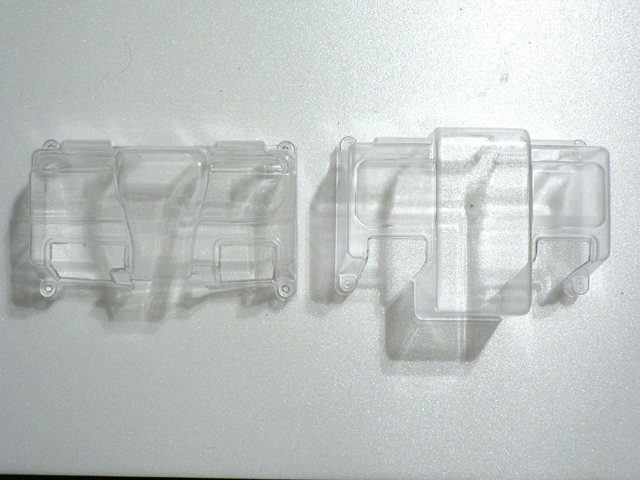
| 左が標準のボードカバー。右がラージサイズのボードカバー。特に中央部分が大きくなっている | ボードカバーを横から見たところ。左が標準のボードカバー。右がラージサイズのボードカバー |
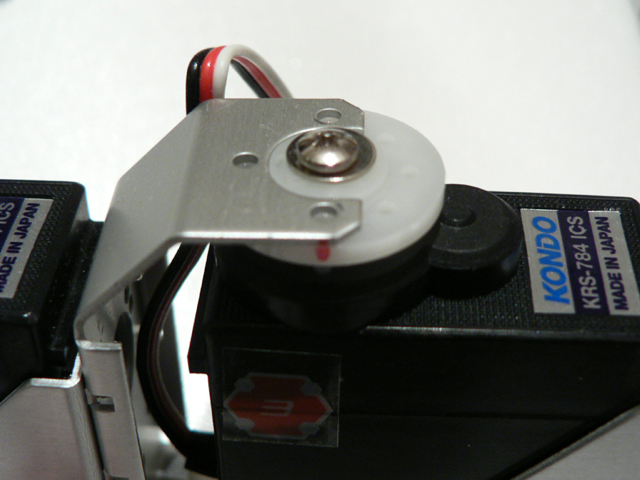
KRG-2を組み込むには、取り付ける向きが重要になる。前後方向に使用する場合は、ボードベースに対して並行に取り付け、左右方向に使用する場合は、ボードベースに対して垂直に取り付けることになる。どのサーボに補正をかけるかも重要だが、標準状態で組み立てた場合、前後方向については両膝下のサーボ(CH16とCH22)、左右方向については足首のロール軸(CH17とCH23)に補正をかけるというのが、1番効果的である。
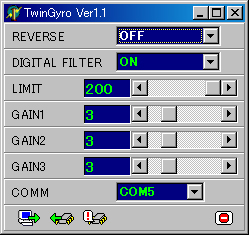 |
| ジャイロ設定用ツール「ジャイロマネージャー」。前後方向に補正をかける場合、CH16に接続する端子の設定を「REVERSE:ON」にする |
前後方向に補正をかける場合、左右のサーボの動作方向が逆になるため、片方のサーボ(CH16)に働くジャイロの設定をリバースにする必要がある。ジャイロの設定は、近藤科学のWebサイトで公開されている「ジャイロマネージャー」を利用して行なう。なお、ジャイロマネージャーでジャイロの設定を行なうには、KRG-2とPCを別売の「ICS-PCインターフェース」付属ケーブル経由で接続する必要がある。KHR-1に付属している接続ケーブルでは利用できないので注意したい。
ただし、無線コントロールユニットに付属しているケーブルを流用することはできるので、無線コントロールユニットを持っているのなら、新たにICS-PCインターフェースを購入する必要はない。
KRG-2の取り付け方法についてだが、筆者は、1つめのKRG-2(前後のピッチ軸用)を無線受信機の上に瞬間接着剤で固定し、もう1つのKRG-2(左右のロール軸用)を、1つめのKRG-2と直角になるように瞬間接着剤で固定してしまった。少々乱暴な方法だが、ボードカバーで覆ってしまえば倒れてもKRG-2に直接力が加わるわけではないので、とりあえず大丈夫だろう。
 |
 |
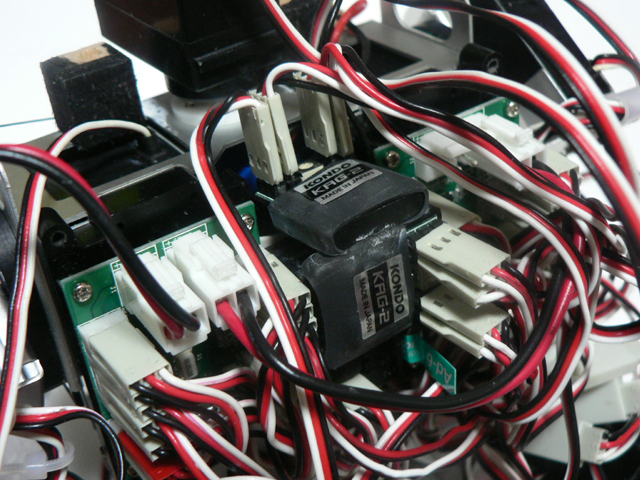 |
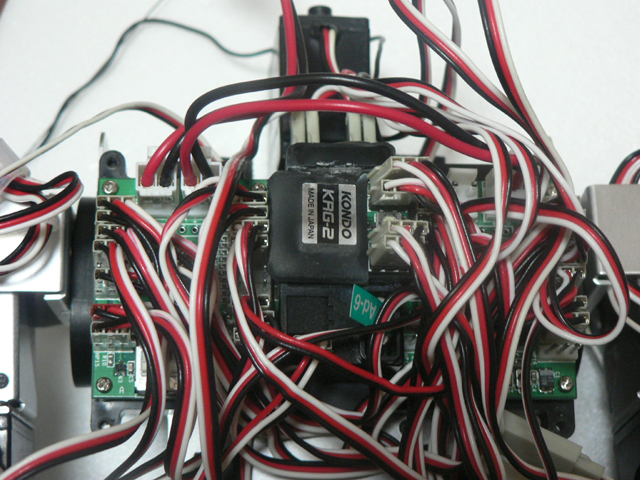
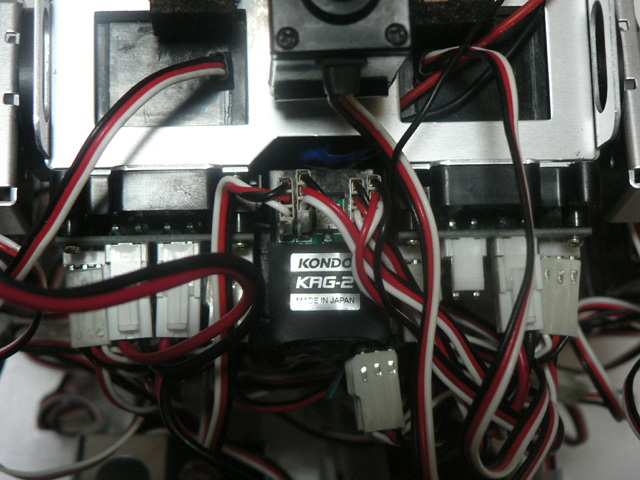
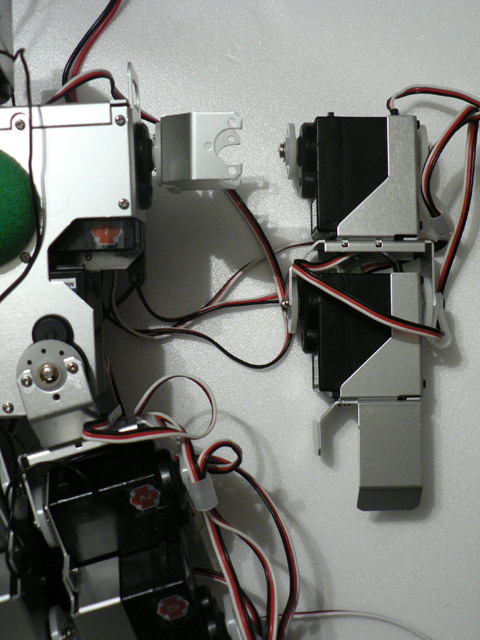
| 前後のピッチ軸用のKRG-2は、ボードベースに対して並行に取り付ける。向きも重要だ | こちらは左右のロール軸用のKRG-2。本当は支柱かなんかを立てて取り付けるべきだろうが、直接KRG-2同士を接着してしまった | この写真を見れば、2つのKRG-2の位置関係がよくわかる |
ジャイロセンサーを有効に活用するには、ジャイロの感度(ゲイン)の調整が重要である。ゲインは、KRG-2上の半固定抵抗器で調整可能で、左に回すと感度が下がり、右に回すと感度が上がる。感度を上げすぎると、敏感になりすぎてかえって不安定になるので、あまり効かせすぎないほうがいい。ゲインを適度に調整すると、KHR-1を手で傾けて離しても、その揺れがすぐに止まるようになる。
ジャイロセンサーを組み込めば、ちょっとくらい床が傾いていても、倒れずに歩けるようになるのだ。なお、ジャイロセンサーを装着しても、ほとんどのモーションは修正せずにそのまま利用できるが、ジャイロセンサー経由で接続されているサーボ(2軸を補正しているのなら、CH16,17,22,23の4つ)は、教示機能が使えなくなることに注意してほしい。
 |
 |
 |
| 【動画】ジャイロなしの状態では、手でKHR-1を前に傾けて離すと、そのままKHR-1が倒れてしまう | 【動画】こちらもジャイロなしの状態。傾きを小さくしたので倒れはしなかったが、しばらく前後にゆらゆら揺れている | 【動画】前後方向を補正するジャイロを有効にした状態。ジャイロなしの状態で倒れてしまった場合と、同じくらい傾けたが、KHR-1は倒れずに踏ん張っている |
 |
 |
 |
| 【動画】前後方向を補正するジャイロを有効にした状態。手を離した後の揺れが急速に小さくなっていることに注目 | 【動画】ジャイロを有効にした状態で、アルミ板とボールペンで作成したシーソーの上を歩かせてみた。ジャイロの効果により、倒れずに歩くことができた | 【動画】今度は小走りモーションでシーソーにチャレンジ。こちらも見事成功 |
KHR-1のフレーム設計は素晴らしいが、側転などのフレームに大きな負担がかかるモーションを何度も実行させると、肩のフレームが歪んでしまう。そこで肩のフレームを保護するために登場したのが、ショルダーサポーター(1,260円)と呼ばれるオプションパーツだ。ショルダーサポーターは、プラスチック製のパーツで、肩のフレームとボディフレームの間に挟み込んで使用する。
なお、初期ロットのショルダーサポーターに付属している説明書では、サーボホーンの取り付け方が間違っている。サーボホーンとショルダーサポーターで、肩のフレームを挟み込むのが正しい取り付け方法である。正しくショルダーサポーターを取り付ければ、肩のフレームとボディフレームの間の隙間がなくなるので、側転などをさせてもフレームにかかる負担が小さくなる。取り付け方法については、近藤科学のWebサイトを参考にして欲しい。
 |
 |
 |
| KHR-1用のショルダーサポーター。ちなみに、この説明書の取り付け方法は間違っている | ショルダーサポーターは、両肩用に2個セットになっている | ショルダーサポーターを取り付けるには、いったん腕の部分を取り外す |
 |
 |
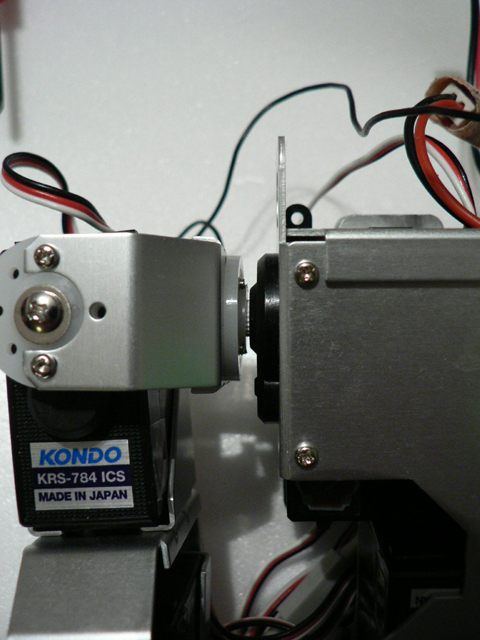 |
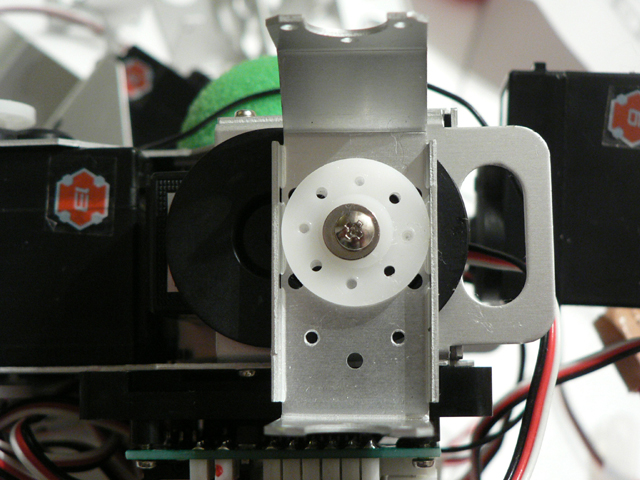
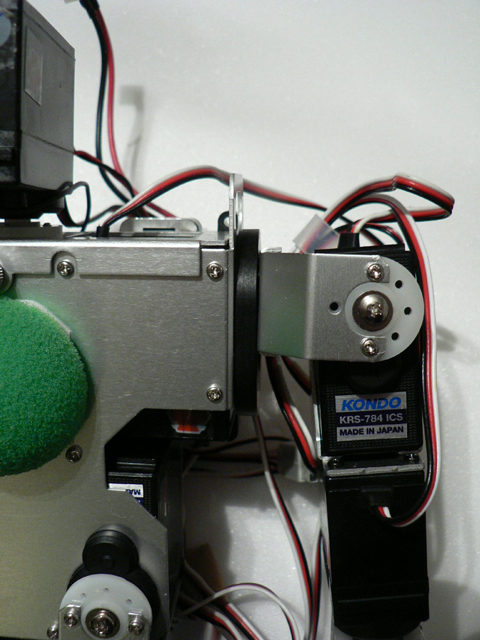
| このように肩のフレームがサーボホーンとショルダーサポーターでサンドイッチされるように装着されるようにするのが、正しい取り付け方法だ | ショルダーサポーター取り付け後の肩の様子。肩のフレームとボディフレームの間にショルダーサポーターが挟まり、隙間がなくなっている(なお、こちら側の腕は後述する拡張4自由度ユニットを装着している) | こちらは、ショルダーサポーター取り付け前の肩の様子。肩のフレームとボディフレームの間に隙間があるので、側転時などに肩のフレームに大きな負担がかかる |
KHR-1用オプションの中でも、1番の大物といえるのが、「拡張4自由度ユニット」だ。このオプションは、その名の通り、4自由度(4軸)を追加するためのパーツであり、装着することで、KHR-1の自由度は21となる。KHR-1の標準状態の自由度は17(つまりサーボモーターが17個ある)なのだが、足や腰にヨー軸(地面に対して垂直な方向の回転軸)がないため、その場で左右に大きく旋回させることは難しい。また、腕の自由度が2しかないため、手首をひねるような動きもできない。
しかし、拡張4自由度ユニットを装着すれば、足裏にヨー軸(旋回軸)が加わり、腕にも自由度(腕旋回軸)が1つ追加されるので、その場での旋回をはじめ、より柔軟なモーション作成が可能になる。ただし、今回紹介する拡張4自由度ユニットは、すでに生産が完了してしまっている。代わりに、足裏ではなく、足の付け根にヨー軸を追加する新オプションが7月中に登場する予定だ。
拡張4自由度ユニットには、サーボモーター4つと、足裏(レボリューションソール)やブラケット、ネジなどが含まれている。拡張4自由度ユニットを組み込むには、腕を取り外す必要があるが、サーボホーンの取り付け位置をマジックなどでマーキングしておくと、再組み立ての際にサーボの位置出しが簡単になる。メンテナンスでサーボを取り外すときなどに、覚えておくと便利だ。
拡張4自由度ユニットを装着すると、足裏のレボリューションソールを扇のように回転させることが可能になる。通常の歩くモーションなどは、ほぼそのまま使えるが、起きあがりモーションなどは手の長さが変わってくるため、修正が必要になることが多い。
レボリューションソールを使えば、その場で高速に旋回できると思ったのだが、実際にモーションを作ってみると、これがなかなか難しい。体重の載せ方がポイントなのだが、完全に片足に体重を載せた状態で、そちら側のレボリューションソールを回して旋回しようとしても、サーボのトルクが足りないためか、うまく動いてくれない。腕を伸ばすことによる重心移動なども利用して、45度の旋回モーションを作ってみたのだが、まだまだ改良の余地はありそうだ。
 |
 |
 |
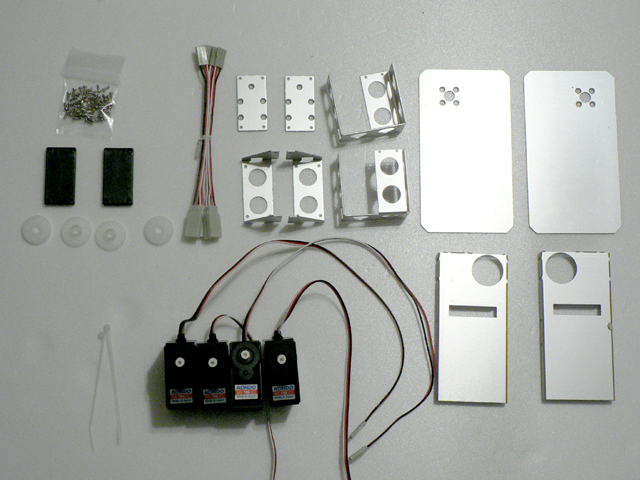
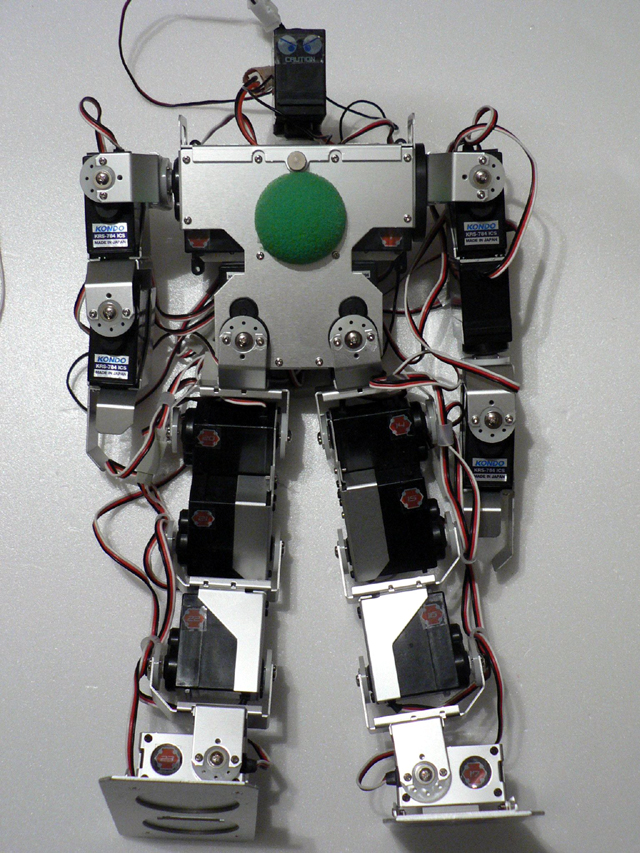
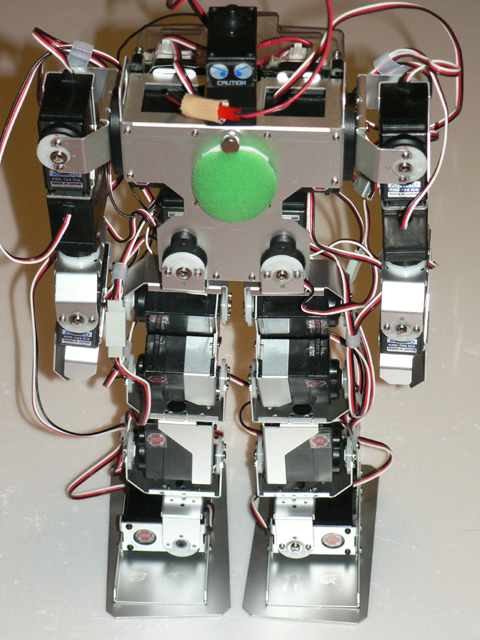
| 拡張4自由度ユニットに含まれているパーツ一式。サーボモーターも4つ追加される | 拡張4自由度ユニットには、新型のKRS-786ICS-Red Versionが採用されていた。KRS-784ICSと、トルクなどの基本スペックは同一だが、電源を入れてない状態でのブレーキが強くかかるようになっている | 拡張4自由度ユニットを装着する前のノーマル状態のKHR-1。腕の自由度が片腕につき2つ(肩を入れると3自由度)しかなく、腕がやや短い |
 |
 |
 |
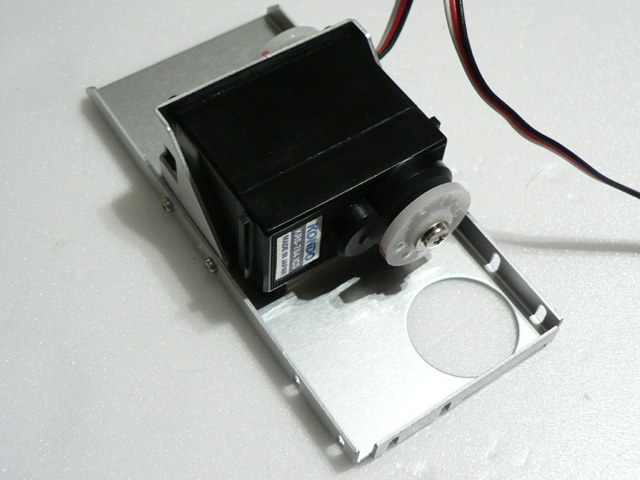
| 腕に追加するサーボは、ボトムケースを軸なしのものに交換する | 分解前にサーボホーンの取り付け位置をマジックなどでマーキングしておくと、再組み立ての際の位置出しが簡単になる | 写真で右側に写っている腕は、拡張4自由度ユニットの腕旋回軸が追加されている。左側の腕はノーマル状態なので、長さも違うことに注目 |
 |
 |
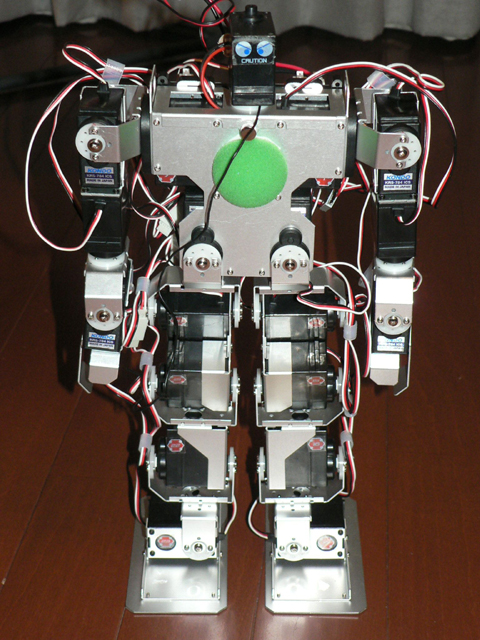
| 足となるソールベース。この下に旋回用のレボリューションソールが付く | 拡張4自由度ユニット装着後のKHR-1。先ほどのノーマル状態と比較して欲しい |
 |
 |
| 【動画】拡張4自由度ユニットのレボリューションソールを利用した、45度右旋回モーション | 【動画】拡張4自由度ユニットのレボリューションソールを利用した、45度左旋回モーション |
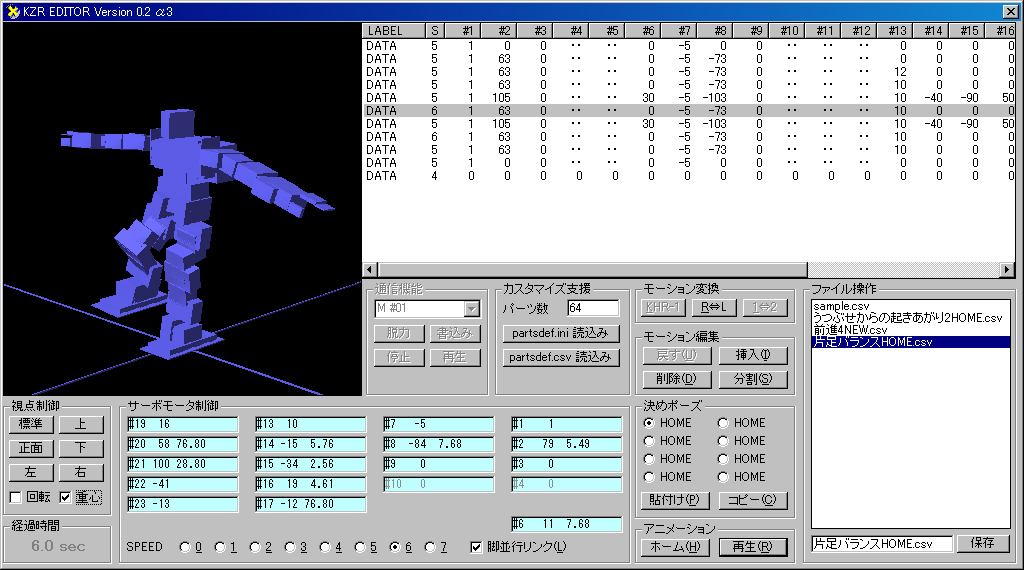 |
| かず氏が作成中のモーションエディター「KZR EDITOR」。現時点でのバージョンは0.2α3。十字のクロスしているところが、重心位置を地面に投影したものになる |
KHR-1に付属するモーションエディター「HeartToHeart」は、最低限の機能は備えているものの、編集機能など使いやすいとはいえない部分もある。そのため、Excelでモーションデータを編集し、その後HeartToHeartを利用してモーションをKHR-1に転送している人もいるようだ。
そこで紹介したいのが、KHR-1ユーザーのかず氏が作成中の「KZR EDITOR」である。KZR EDITORは、KHR-1およびその派生機を対象としたモーションエディターで、3Dポリゴンによるアニメーション表示をサポートしていることが特徴だ。コピー&ペーストなどの編集機能も充実しているので、モーション作成効率を高めてくれる。KZR EDITORはまだα版のソフトであるが、簡易重心計算や地面計算も実装されるなど、機能強化が続けられている。今後の発展が楽しみだ。
●初のKHR-1公式イベントが7月3日に浅草で開催!
KHR-1の発売が開始されたのは、2004年6月なので、ちょうど1年が経ったことになる。そこで、近藤科学から、KHR-1の発売1周年を記念して、初の公式イベント「KHR-1ファーストアニバーサリー」の開催が発表された。
KHR-1ファーストアニバーサリーの日時は、7月3日の10:00~17:00で、場所は浅草(最寄り駅は地下鉄銀座線田原町駅)のROX3スーパーマルチコートである。KHR-1ファーストアニバーサリーの詳細については、イベント開催のお知らせおよび詳細発表のページを見ていただきたいが、基本的にノーマル状態か、純正オプションを装着した機体のみ参加が可能なようだ。
予選は、2mのダッシュ競技で行なわれ(寝た状態から起きあがってゴールまでダッシュ)、上位16名が決勝トーナメントに進む。決勝トーナメントは、ROBO-ONEの競技規則に準じているが、攻撃時にも足裏以外の部分がリングに接地してしまうと、ダウンとなる(第4回のROBO-ONE J-calssなどのルールと同じ)。
KHR-1ファーストアニバーサリーは、すでに参加受付が開始されているので、1度ロボットバトル大会に出てみたいというKHR-1ユーザーはエントリーしてみてはいかがだろうか。筆者もKHR-1ユーザーの1人として、公式イベントの開催を熱望していたので、KHR-1ファーストアニバーサリーにも参加する予定だ(例によって勝てる自信はないのだが)。
なお、KHR-1ファーストアニバーサリーでは、KHR-1ユーザーによるバトル大会以外に、ROBO-ONE上位ロボットのデモンストレーションなども行なわれる予定だ。当日の見学は自由なので、二足歩行ロボットに興味があるのなら、是非見に行くことをお勧めする。実際に動いているのをそばで見てしまうと、きっと欲しくなるだろう。
□近藤科学のホームページ
http://www.kondo-robot.com/
□製品情報
http://www.kondo-robot.com/html/Robot_products_kit.html
□「KHR-1ファーストアニバーサリー」イベント開催のお知らせ
http://www.kondo-robot.com/html/KondoNews.html>
□関連記事
【4月7日】【石井】夢の二足歩行ロボットキット「KHR-1」徹底レビュー(番外編)
http://pc.watch.impress.co.jp/docs/2005/0407/digital014.htm
【2月10日】【石井】夢の二足歩行ロボットキット「KHR-1」徹底レビュー(第3回)
http://pc.watch.impress.co.jp/docs/2005/0210/digital013.htm
【1月14日】【石井】夢の二足歩行ロボットキット「KHR-1」徹底レビュー(第2回)
http://pc.watch.impress.co.jp/docs/2005/0114/digital012.htm
【2004年12月24日】【石井】夢の二足歩行ロボットキット「KHR-1」徹底レビュー(第1回)
http://pc.watch.impress.co.jp/docs/2004/1224/digital011.htm
(2005年6月14日)
[Reported by 石井英男]
【PC Watchホームページ】
PC Watch編集部 pc-watch-info@impress.co.jp ご質問に対して、個別にご回答はいたしません
Copyright (c) 2005 Impress Corporation, an Impress Group company. All rights reserved.