 |


■石井英男のDigital Life■夢の二足歩行ロボットキット「KHR-1」徹底レビュー(第1回)
|
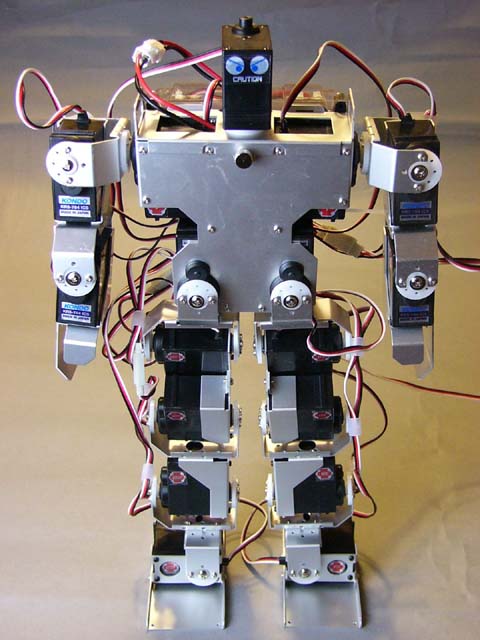 |
| ツクモが販売する近藤科学製の自作ロボット「KHR-1」 |
ASIMOやAIBOの登場によって盛り上がったロボットブームも、その後やや沈静化したが、昨年あたりから、映画「ロボコン」が公開されたり、ROBO-ONE出場ロボットが日テレの「ワールドレコーズ」にたびたび登場するなど、再びブレイクの兆しを見せている。技術的にも着々と進歩しており、ホンダからは先日、走ることも可能な次世代ASIMO(森山氏の記事を参照)が発表された。
筆者も、ロボットに興味はあるのだが(本連載でも以前「週刊リアルロボット」を取り上げた)、ロボットに関しては全くの素人であり、二足歩行ロボットのような高度なロボットを自分で作る技術はとてもない。しかし、二足歩行ロボットはロボットの華であり、いつかは二足歩行ロボットを手に入れたいと思っていた。
そんな夢をかなえてくれるのが、2004年夏に登場した近藤科学の二足歩行ロボットキット「KHR-1」である。KHR-1は、歩くことはもちろん、前転や後転、側転などさまざまな動作が可能な二足歩行ロボットだが、初心者でも気軽に組み立てられるように設計されていることが魅力だ。またKHR-1では、PCから制御を行なうことで、オリジナルの動作(モーション)も自由に作ることができる。
KHR-1の販売価格は126,000円(税込)であり、気軽に購入できる値段というわけではないのだが、本格的な二足歩行ロボットキットとしては、これでも驚くほど安いのだ。例えば、二足歩行ロボットバトル大会「ROBO-ONE」に出場しているロボットのパーツ代の合計は、安いものでも数十万円、高いものでは100万円を超える。
KHR-1は、初期ロットがあっという間に完売するほどの人気を集め、すでに1,000台以上が出荷されたという。KHR-1は、近藤科学のサイトから購入できるほか、ツクモロボット王国のネットショップでも取り扱われている。秋葉原のツクモロボット王国ではKHR-1を常時展示しており、店頭での購入も可能なので、興味を持った方は一度見に行ってみてはいかがだろうか。
●教示機能の搭載によってモーションデータを簡単に作成可能
KHR-1の詳細については、近藤科学のサイトを見ていただきたいが、簡単にスペックを紹介すると、サイズは340×180mm、重量は約1.2kg(バッテリ込み)、全部で17の自由度を持つ。自由度とは、人間の関節に相当すると思えばよい。例えば、ノートパソコンの液晶のヒンジは、1つの軸の周りしか動かないが、この場合の自由度は1となる。最近のケータイでは、2軸のヒンジを搭載し、液晶を表側にも裏側にもできる製品が登場しているが、この場合自由度は2となる。自由度が多いほど、複雑かつ柔軟な動きが実現できることになる。
KHR-1の17自由度の内訳は、首が1、片腕が3(両腕で6)、片脚が5(両脚で10)となっている。なお、KHR-1に搭載されているコントロールボード「RCB-1」では、最大24個のサーボモーターを制御できるので、24自由度まで拡張可能だ(4自由度を追加するオプションも発売されている)。
また、こうした二足歩行ロボットでは、ロボットの動きを制御するモーションデータを作るのが面倒なのだが、KHR-1では、教示機能と呼ばれる世界初の機能を搭載し、短時間でモーションデータを作成できることが特徴だ。
教示機能とは、脱力したロボットを直接手で動かして、そのポジションのデータをPCに取り込むことができる機能だ。ポジションとポジションの間の動きは自動的に補完してくれるので、途中のポーズを何カットか指定していくだけで、スムーズなモーションデータを作成できる。
●ドライバー1本で組み立て可能だがネジ止め箇所は100カ所を超える
このように、KHR-1は非常に高機能なロボットであり、オプションによってさらに機能を拡張していくことが可能だ。1回の記事ではとても紹介しきれないので、数回にわたって取り上げることにしたい。
第1回となる今回は、キットの組み立て手順と、あらかじめ提供されているサンプルモーションによる動作を紹介しよう。
KHR-1のパッケージにはさまざまなパーツが入っているが、中でも重要なのが17個のサーボモーターとフレーム、ブラケット類である。サーボモーターは17個全部同じだが、フレームはいくつかの種類があるので、間違えないようにしたい。
なお、印刷物は、B5用紙1枚のキットガイダンスだけで、組み立てマニュアルやソフトウェアマニュアルは付属のCD-ROMにPDF形式で収録されている。KHR-1を動かすには、Windows 2000/XPが動作するPCも必要である。
 |
 |
 |
| KHR-1のパッケージ。サイズもそれほど大きくはない | KHR-1のパーツ一式。心臓部となるサーボモーターが17個ある | ネジやコード類は、種類別に袋分けされているので分かりやすい |
 |
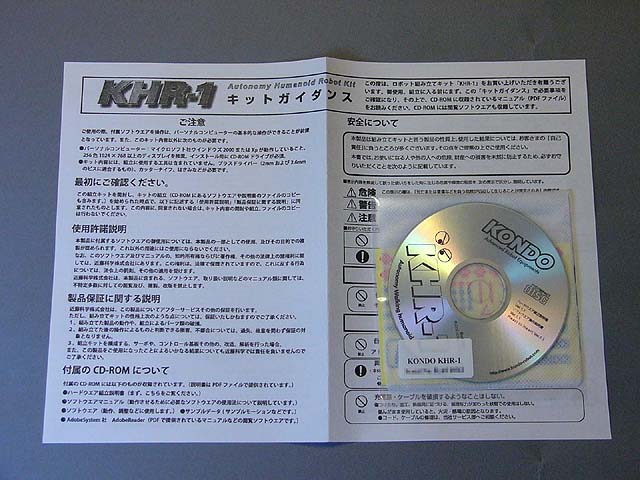 |
| 付属のニッカドバッテリと充電器。フル充電には約12時間かかる | 組み立てマニュアルとソフトウェアマニュアルはPDF形式でCD-ROMに収録されている |
 |
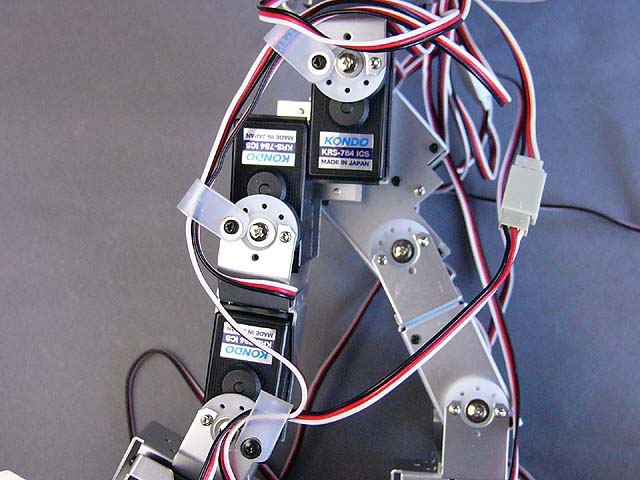
 |
| KHR-1では、近藤科学製のサーボモーター「KRS-784ICS」が採用されている | サーボモーターとCFカードのサイズ比較。フットプリント(底面積)はほぼCFカードと同じだ |
PDF形式の組み立てマニュアルには、図が多用されているので、マニュアルに従ってゆっくり組み立てていけば、初心者でも問題なく組み立てられるだろう(なお、マニュアルに一部誤記を見つけた。P.18のサーボアームの取り付けに必要なネジの合計本数は6本ではなく、16本が正しいと思われる。また、P.32のサーボの接続の説明で、10cmの延長ケーブルを使用するサーボはCH3,9,15,21の4つとなっているが、これはCH3,9,15,16,21,22の6つが正しいと思われる。キットにも10cmの延長ケーブルが6本付属している)。
ただし、右用と左用で微妙に違うパーツがあるので、間違えないように注意したい(筆者は途中で一回間違えてしまった)。基本的には、プラスドライバー1本あれば組み立てが可能だ(サーボモーターの出っ張り部分をカットする必要があるので、ニッパーがあると便利)。
組み立て手順は、
1.サーボモーターのケースビスを外す
2.サーボモーターをブラケットに取り付ける
3.ボディを組み立てる
4.腕や足などをパーツ単位で組み立てる
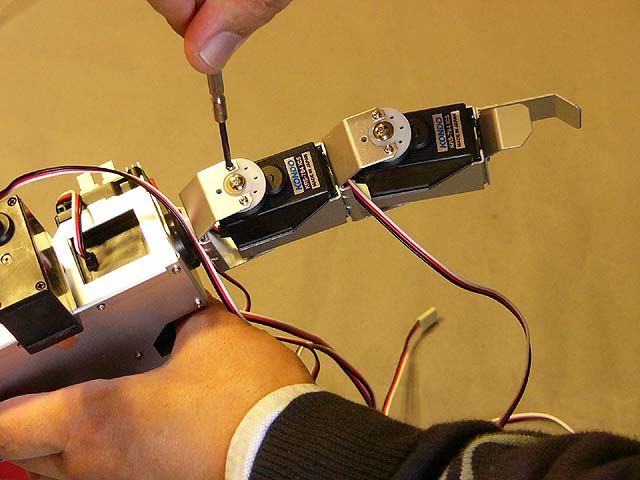
5.サーボホーンの取り付け(この際に通電して位置出しが必要)
6.腕の組み立て
7.足の組み立て
8.基板の設定と取り付け
9.全体の組み立てと動作確認
10.配線を束ねる
11.基板カバーのカットと取り付け
という流れになる。この5番目から9番目の項目では、サーボモーターに通電して、初期状態の停止位置を確認(位置出し)しながら作業を行なう必要があるので、組み立てをはじめるまえにに、付属のニッカドバッテリを充電しておくこと(付属の充電器ではフル充電に約12時間もかかるのが難点だ)。
KHR-1の組み立ては、基本的にはネジ止め作業だけだが、ネジ止めが必要な箇所は100カ所を超えるので、組み立てにはそれなりに時間がかかる。一気に組み立てようとしないで、途中で休憩を入れながらゆっくり組み立てるといいだろう。なお、ネジやワッシャは少し多めに入っているので、1つや2つなくしても大丈夫だ。
サーボモーターと小さなアルミ製パーツを組み合わせていくことで、最初はとてもロボットに見えなかったパーツが少しずつロボットの形になっていくのを見るのは、なかなか楽しい。思わず、時間も忘れて夢中になってしまった。
筆者の場合、9番目の項目まで終わって、動作確認をするまでにかかった時間は6時間ほどであった。ただし、筆者は途中で写真を撮りながら作っていたので、作ることに専念すればもっと短い時間で完了するだろう。組み立ての様子については、写真とキャプションを参考にして欲しい。
 |
 |
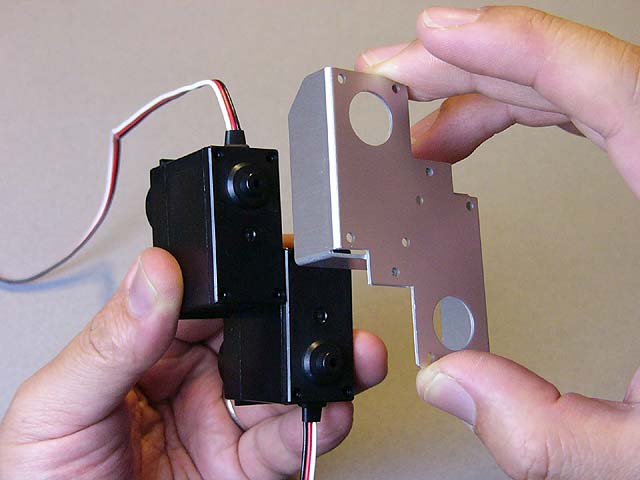 |
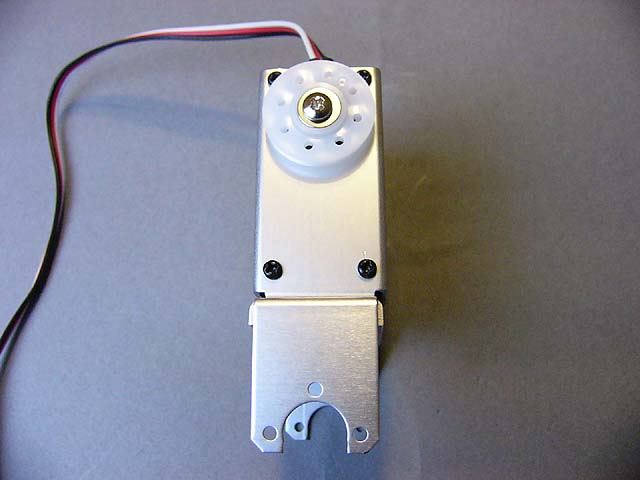
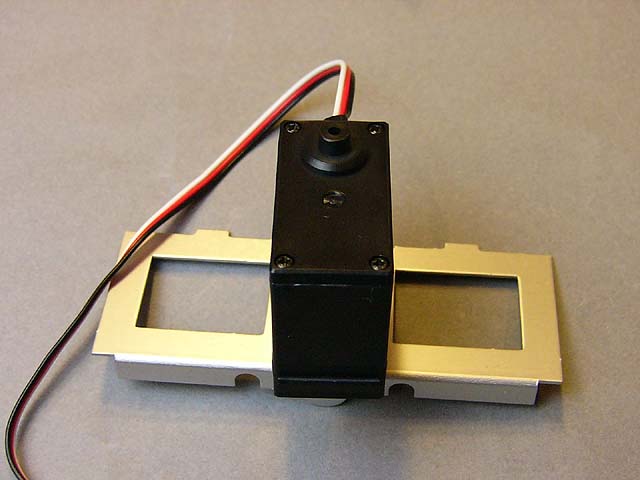
| まず、サーボモーターのケースビスを取り外す | 取り外したケースビスを利用して、ブラケットをサーボモーターに固定する | 足となるブラケットには2つのサーボモーターを固定する |
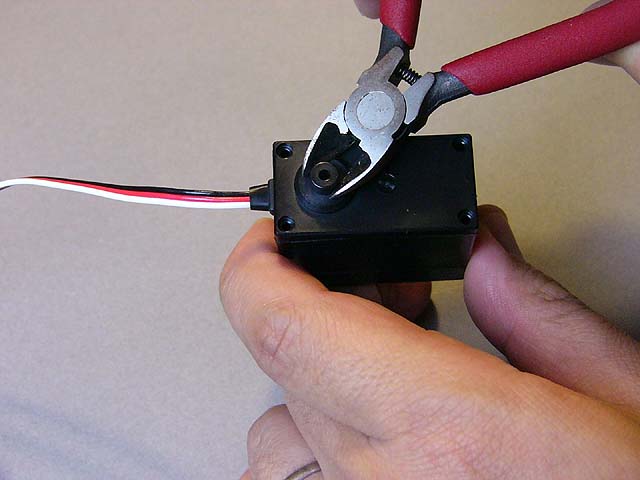 |
 |
 |
| 17個のサーボモーターのうち2つは、出っ張り部分をカットする必要がある | サーボモーターの出っ張り部分をカットしたところ | サーボモーターをブラケットに全て取り付けたところ。まだロボットらしい形にはなっていない |
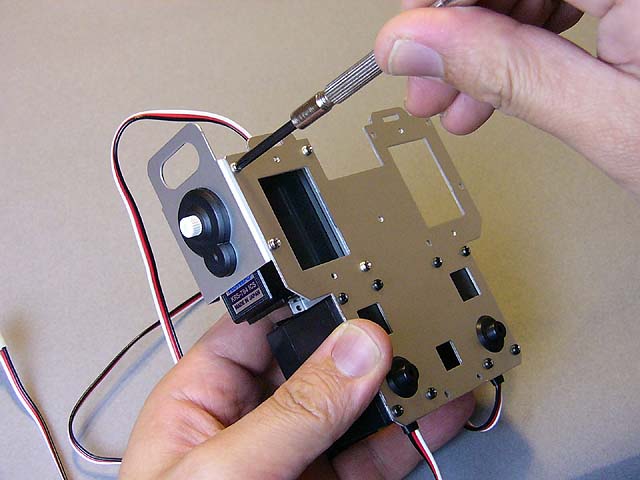 |
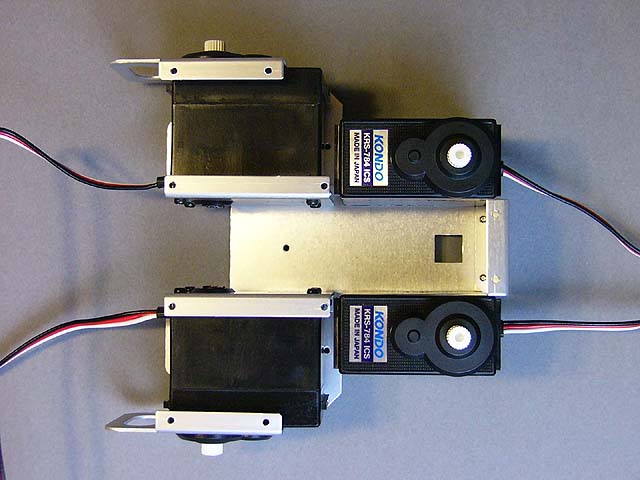 |
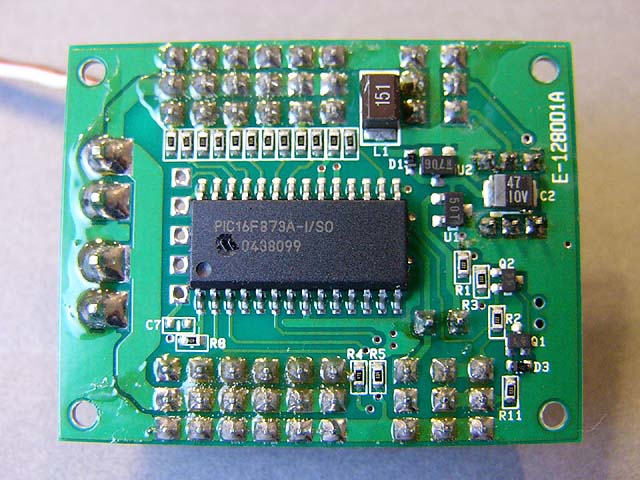 |
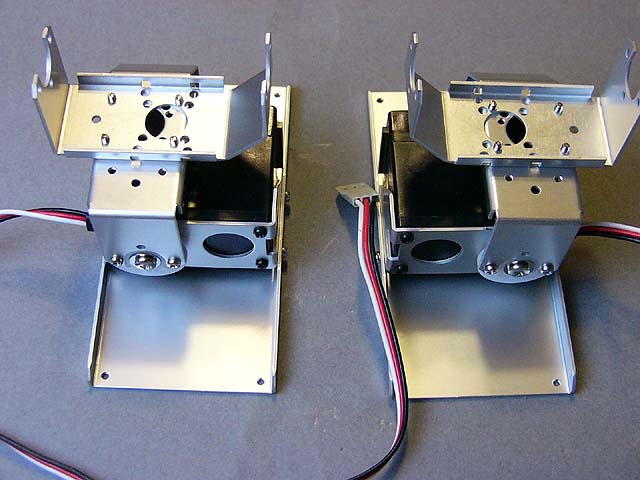
| ボディフレームにサーボモーターを取り付ける | ボディフレームには全部で4つのサーボモーターが固定される | コントロールボード「RCB-1」の裏面。PICマイコン「PIC16F873A」が搭載されている |
 |
 |
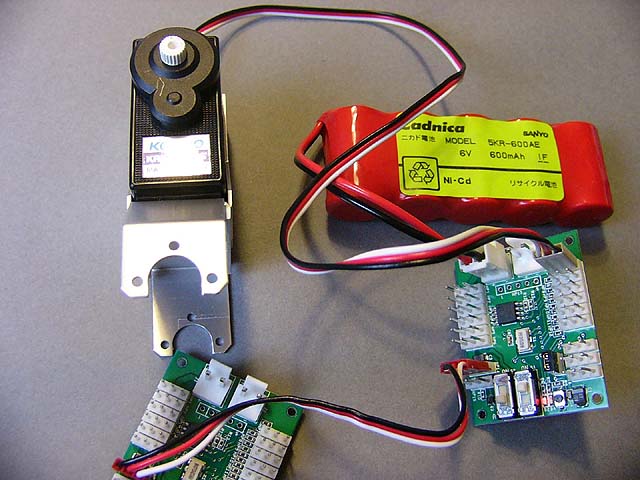 |
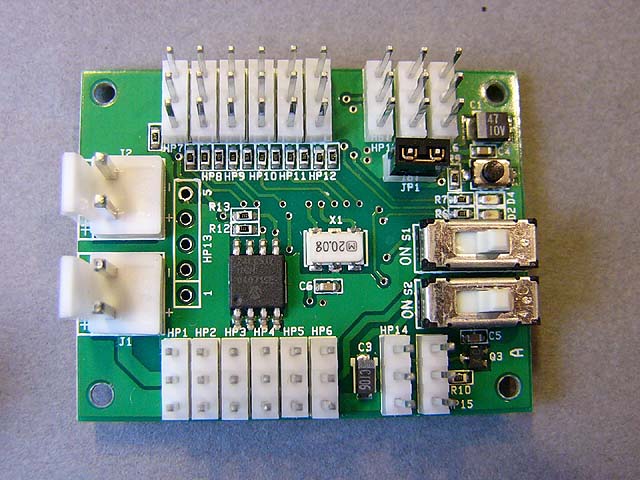
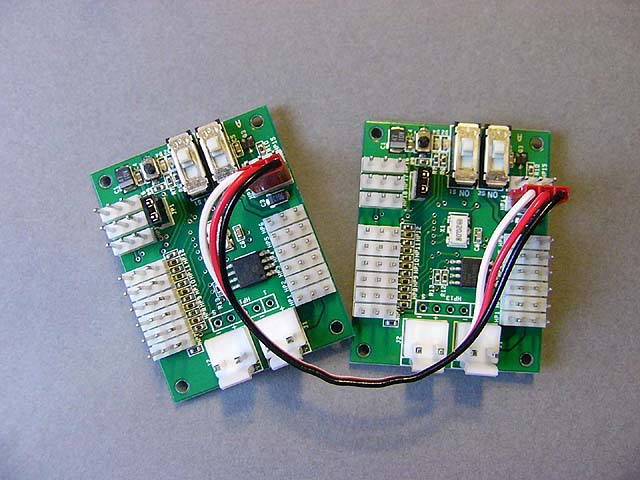
| コントロールボード「RCB-1」の表面。1枚で12個のサーボモーターを制御可能 | KHR-1には、RCB-1が2枚付属しているので、合計で24個のサーボモーターを制御できる | ここからはサーボモーターに実際に通電して、位置出しをしながら組み立てる |
 |
 |
 |
| 位置出しをしたサーボモーターに、白いプラスチック製のサーボホーンを取り付ける | サーボモーターの反対側にはフリーホーンを取り付ける | 左右の足裏となる部分を組み立てる |
 |
 |
 |
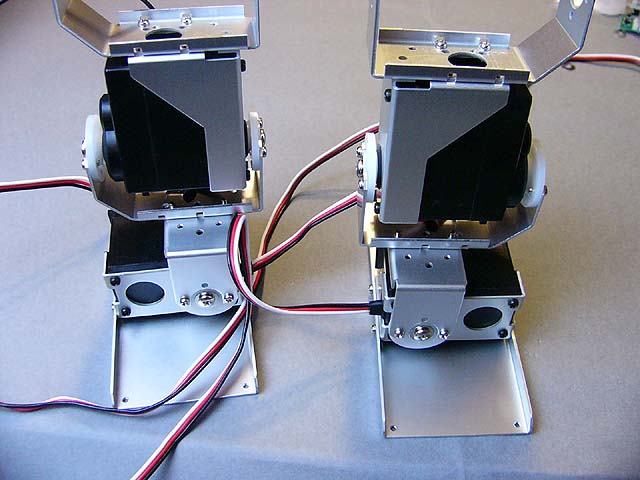
| 左右の膝下部分が完成 | 両足が完成。だんだんロボットらしくなってきた | コントロールボードをボディに固定する |
 |
 |
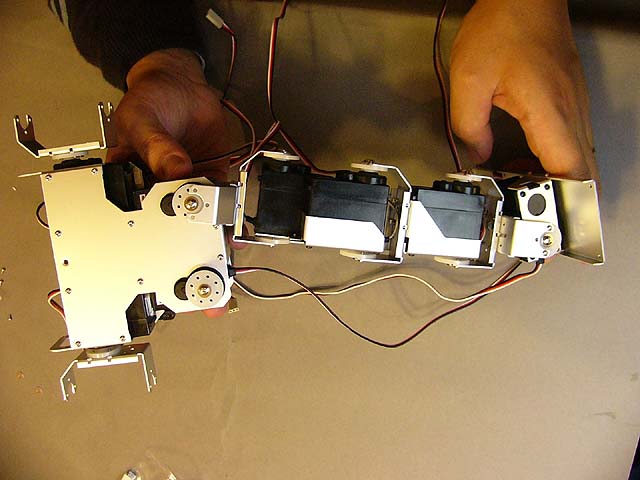 |
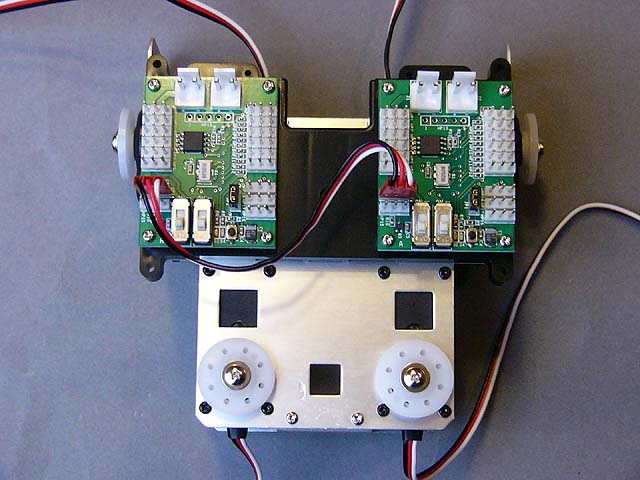
| 2枚のコントロールボードを取り付けたところ | これは頭の部分。サーボモーターがそのまま頭部となる | ボディ部分に先ほど組み立てた足を取り付ける |
 |
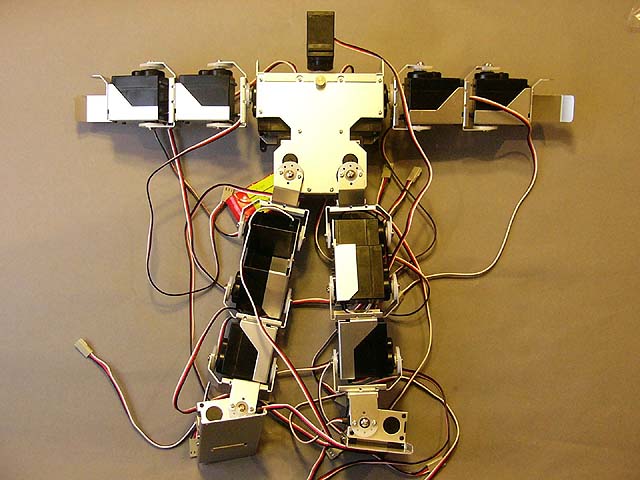 |
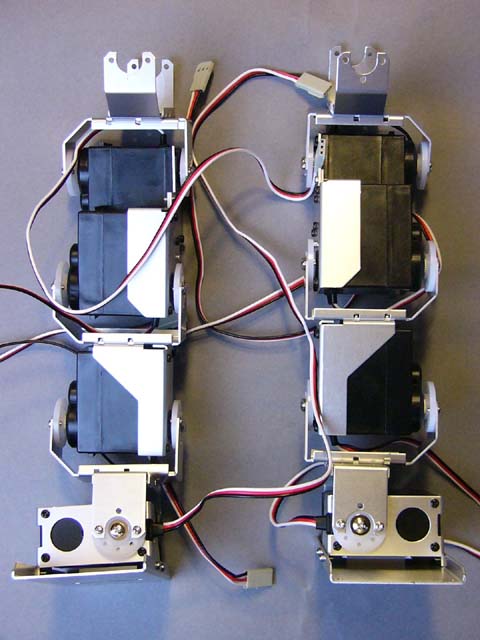
| 今度はボディ部分に腕を取り付ける | コードの接続はまだだが、ボディの組み立ては一通り完了 |
 |
 |
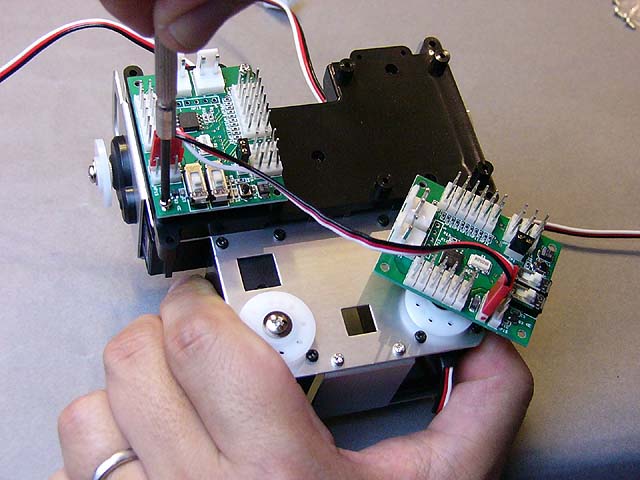
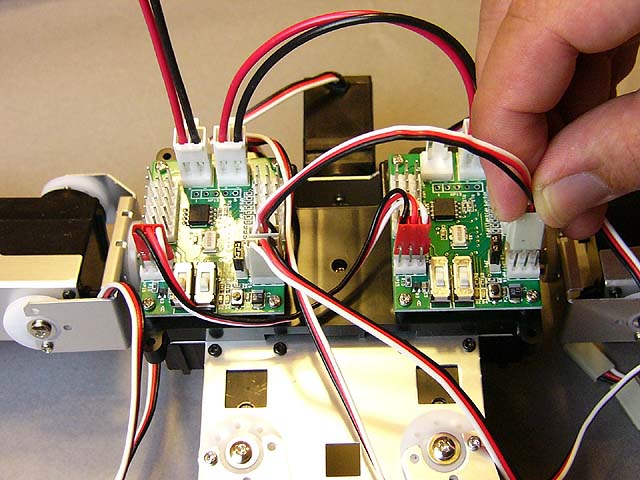
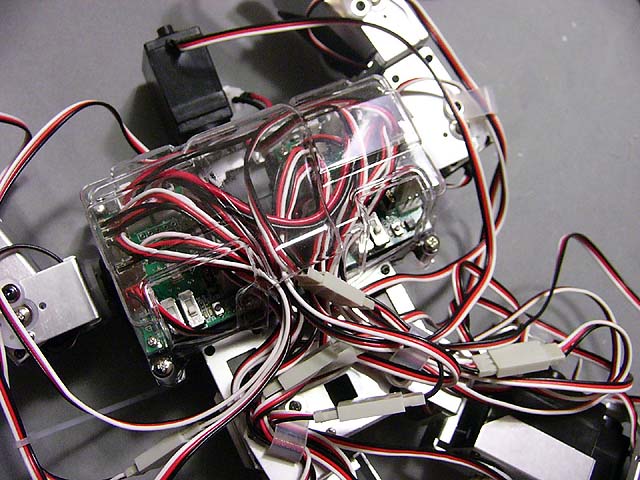
| コードをコントロールボードに接続する。接続するコネクタを間違えると正常に動かないので気をつけたい | コードの接続が完了したところ。このままではコードがからまってしまうので、束ねる必要がある |
ここまで組み立てが完了したら、PCにモーション制御用ソフトの「HeartToHeart」をインストールし、PCとKHR-1を接続する。付属CD-ROMに収録されていたのはVer1.1だが、バグフィックスが行なわれたVer1.2が近藤科学のサイトで公開されているので、そちらを利用した。
KHR-1は、PCとのインターフェイスとしてRS-232C(シリアル)を利用するが、最近のPC(特にノートPC)では、レガシーインターフェイスであるRS-232Cを装備していないことも多い。その場合は、USB-RS-232C変換ケーブルを使えばよい。筆者は、サンワサプライのUSB-RS-232C変換ケーブル「USB-CVRS9」を利用した。
HeartToHeartを使って(このソフトの使い方については、次回詳しく紹介する)、17個のサーボモーターが全て正しく動作することを確認したら、トリム機能でサーボモーターの位置の微調整を行なう。この微調整は、二足歩行などの動きを実現するには重要なポイントである。
調整が終了したら、余分なコードを束ねて、基板ケースで取り付ければ組み立ては完了だ。コードはうまく束ねないと、フレームなどに絡まってサーボモーターが正常に動かなくなることある。なお、基板ケースには余分な部分があり、カッターなどで切り取らないといけないのだが、これが結構手間のかかる作業であった。サーボモーター番号シールや顔シールが付属しているので、好みに応じて貼るとよいだろう。特にサーボモーター番号シールを貼っておくと、モーション作成時に便利だ。
 |
 |
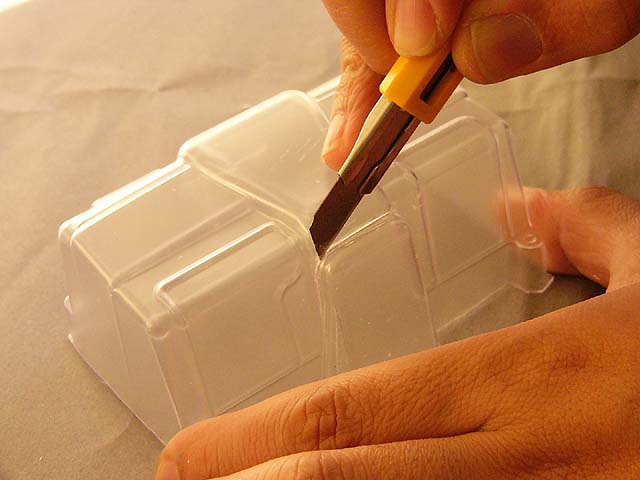 |
| 付属のナイロンクリップやストラップでコードを束ねていく | 基板をカバーする基板ケース。余分な部分が付いているので、カッターなどでカットする必要がある | 基板ケースをカットしているところ。少しずつ切っていくのはなかなか大変だ |
 |
 |
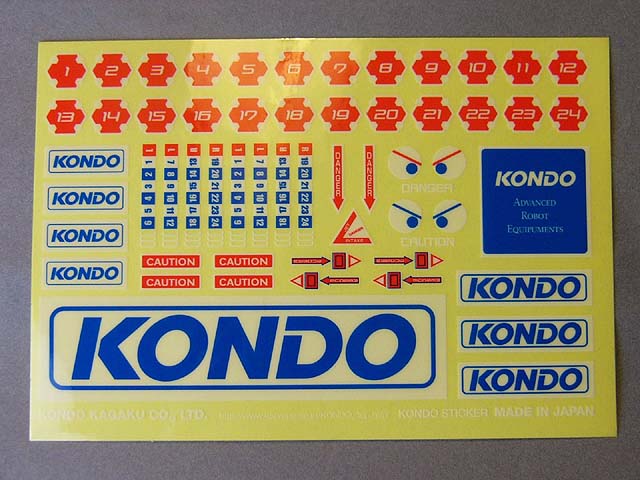 |
| 不要な部分の切り取りが終了した基板ケース。切り取りにもかなり時間がかかった | 基板ケースを取り付けたところ。これで倒れても基板を保護することができる | サーボモーター番号シールや顔シールが付属しているので、好みに応じて貼るとよい |
KHR-1で、二足歩行をはじめとするさまざまな動きを行なわせるには、ホームポジションと呼ばれる基本姿勢が重要である。
ホームポジションは、直立した状態のポーズで、全ての動作の基本となる。KHR-1の電源を入れると、自動的にホームポジションに移行し、全ての動作がそこから始まるので、ホームポジションがきちんと設定されていないと、二足歩行をさせようと思っても、うまくいかない。付属CD-ROMに収録されているホームポジションのサンプルデータを使えば、設定も簡単だ。
 |
 |
|
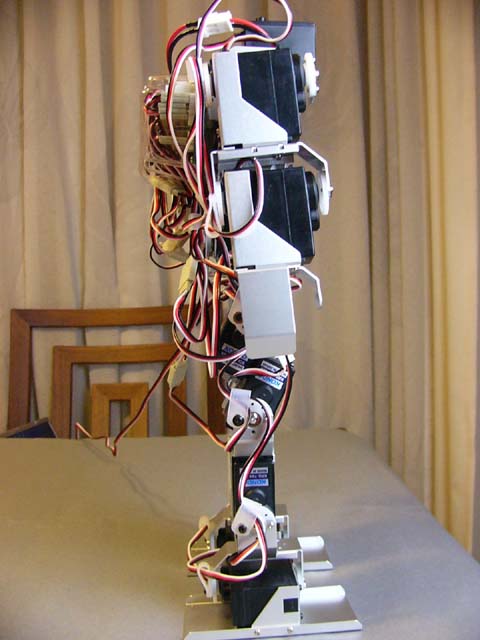 |
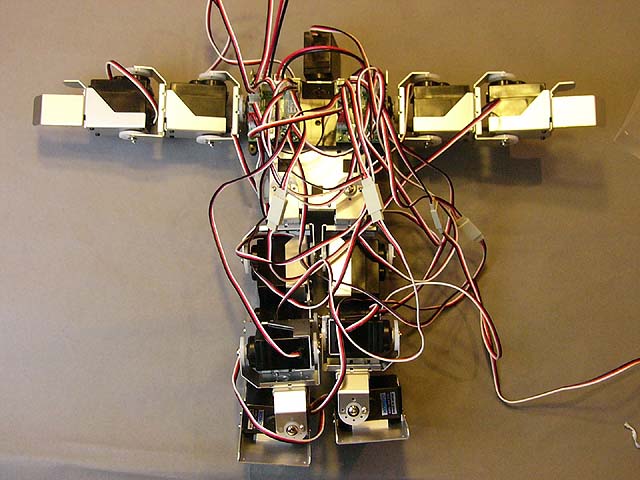
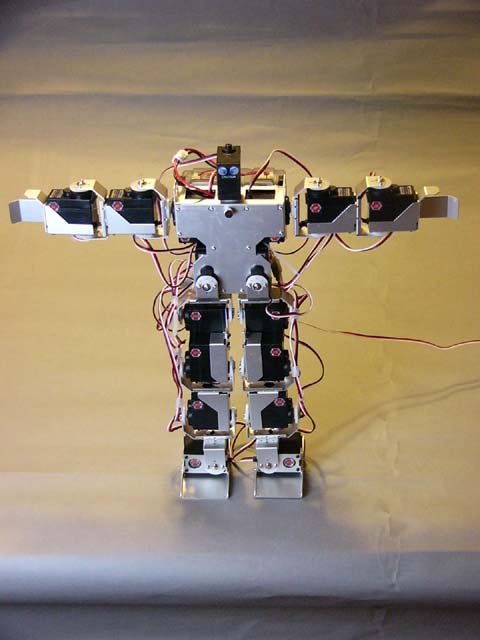
| 完成したKHR-1の雄姿。ホームポジションを設定する前の初期状態では、手を左右に広げている | 初期状態を横から見たところ。重心がかなり後ろに偏っているため、このままでは倒れやすい | こちらはホームポジションを設定したところ。サーボモーターへの負担も小さい | ホームポジションを横から見たところ。重心が中央にあり、バランスがよい |
 |
 |
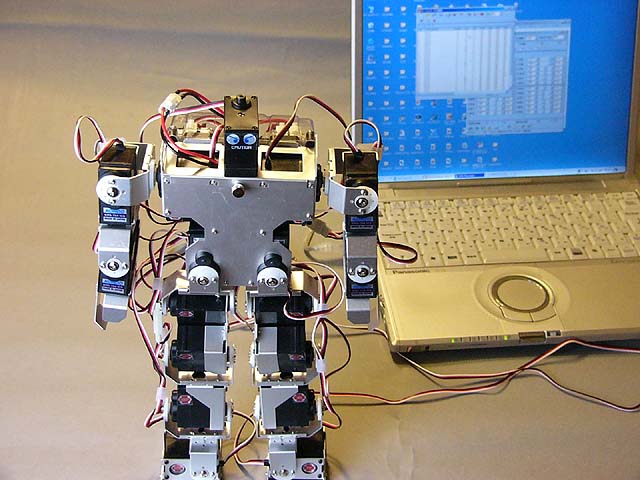
| USB-RS-232C変換ケーブル経由で、Let'snote CF-Y2と接続した | バッテリは、胴体中央部分に格納される |
ホームポジションの設定が終わったので、付属CD-ROMに収録されているサンプルモーションを利用して、さまざまな動作に挑戦してみた。
付属CD-ROMには、二足歩行による前進と後退、左右へのサイドステップ、うつぶせからの起きあがり、仰向けからの起きあがりという6種類のサンプルモーションが収録されている。また、近藤科学のサイトでは、腕立て伏せや旋回LR、前転、後転、駆け足、側転などの追加サンプルモーションをダウンロードできる(現時点で7種類公開されている)。
まずは、付属CD-ROMに収録されている二足歩行による前進モーションをKHR-1に転送し、動かしてみたが、3歩目で右に倒れてしまった。何度か試したが、必ず3歩目で倒れてしまう。必ず右に倒れるので、左右のバランスが異なっているようだ。そこで、もう一度ホームポジションを調整したところ、最後まで倒れずに進むことができた。
また、床の材質の影響も大きいようだ。あまり固くてツルツルだと滑ってしまうし、柔らかすぎてもうまく歩けない。しかも、同じモーションデータを使っても、途中で倒れてしまう場合もある。
予想以上に、二足歩行のバランスはシビアなようだ。ホンダのASIMOやソニーのQRIOでは、やすやすと二足歩行を実現しているように見えるが、二足歩行がいかに難しいかということを、身をもって知ることができた。こうしたことが実感できるのも、実際に二足歩行ロボットを手にしたからだ。
なお、KHR-1が倒れやすいのは、一切センサーを装備していないためだ。ASIMOやQRIOでは、加速度センサーやジャイロセンサーを搭載し、倒れないようにフィードバック制御が行なわれている。
前進以外にも、後退や左へのサイドステップ、うつぶせからの起きあがり、腕立て伏せといったサンプルモーションを試してみたので、動画を見てほしい。この動画を見ればわかるが、かなり危なっかしい場面が多い。まだ完全に左右のバランスが揃っているわけではないようだ。
KHR-1は、誰にでも組み立てられる本格的な二足歩行ロボットだが、組み上げれば即二足歩行が可能というわけではない。二足歩行はバランスが非常にシビアなので、きちんと調整を行なう必要があるのだ。しかし、その試行錯誤の過程も実に楽しい。
ちょうど今日はクリスマスイブだ。KHR-1は本格的な二足歩行ロボットキットであり、子供向けのオモチャというわけではないが、お子さんがロボットに興味を持っているのなら、思い切ってプレゼントしてあげるのはいかがだろうか。一緒に組み立ててあげれば、父親の株もぐんと上がることだろう。
次回は、自分でオリジナルのモーションを作る方法について紹介する予定だ。
 |
 |
 |
| 【動画】付属の前進サンプルモーションで二足歩行に挑戦したが、ホームポジションのバランスが悪いため、3歩目で倒れてしまった(約1.4MB) | 【動画】ホームポジションのバランスを見直して、もう一度二足歩行に挑戦。最後にちょっと向きが変わってしまったが、一応倒れずに歩けた(約3.5MB) | 【動画】同じモーションデータだが、今度は途中で倒れてしまった。床の上に置いた硬質発泡スチロール板が完全に平らではないため、スタート位置によっては倒れてしまう場合があるようだ(約3.2MB) |
 |
 |
| 【動画】二足歩行での後退。こちらは前進よりも安定している(約3.6MB) | 【動画】立った状態からうつぶせの状態になり、そこからまた立ち上がる動作(約1.5MB) |
 |
 |
| 【動画】左へのサイドステップ。これも途中かなりぐらぐらしており、危なっかしい(約2.4MB) | 【動画】立った状態からうつぶせの状態になり、腕立て伏せをしてまた立ち上がる動作(約2MB) |
□ツクモロボット王国のホームページ
http://www.rakuten.co.jp/tsukumo/
□近藤科学のホームページ
http://www.kondo-robot.com/index.html
□製品情報
http://www.kondo-robot.com/html/Robot_products_kit.html
□関連記事
【12月16日】ホンダ、機動性が向上した“走る”ASIMOを公開
http://pc.watch.impress.co.jp/docs/2004/1216/honda.htm
(2004年12月24日)
[Reported by 石井英男]
【PC Watchホームページ】
PC Watch編集部 pc-watch-info@impress.co.jp 個別にご回答することはいたしかねます。
Copyright (c) 2004 Impress Corporation All rights reserved.