■森山和道の「ヒトと機械の境界面」■
8月23日、早稲田大学理工学学術院グローバルCOEプログラム「グローバル・ロボット・アカデミア」による「新RTフロンティア」のオープニングセレモニーが行なわれた。
「RTフロンティア」は人間の生活や地域に密着したロボット研究拠点として活動を続けてきた教育研究施設で、以前は早稲田大学理工キャンパス近くの明治通り沿いにあった。それがより早稲田に近い西早稲田一丁目(早稲田大学29-8号館)に移転したもので、今後、1カ月に1度くらいの頻度で一般への公開も予定されている。なおRTとは「ロボットテクノロジー」の略称で、ロボット技術を応用した機器類や技術のことを指す言葉である。
新RTフロンティアの住所は、新宿区西早稲田1-2-4(地下鉄東西線早稲田駅3b出口から徒歩8分)早稲田大学29-8号館となっている。
 |  |  |
| 新RTフロンティア。早稲田通りの坂を少し上がったところにある | 早稲田大学で開発されてきたロボットやRT機器を間近で見学できる | |
●オープニングセレモニー
 |
| 早稲田大学の教授陣によるテープカットが行なわれた |
地域密着施設という位置づけのためか、オープニングセレモニー自体も参加制限なしの一般公開で行なわれた。早稲田大学副総長の橋本周司教授は「RTフロンティアは市民に結果を見てもらうための施設」と挨拶した。また、東日本大震災でもっと日本のロボットが活躍してほしいという声が一般から多く挙がったことにも触れて、そのためには、研究をどうやって社会に根付けるかが重要だと語り、「ロボット技術は社会にいかに埋め込むかという新しい時代に入ってきた。何ができて何ができないのか。何が問題なのか。そういうことを考えられる場にしていきたい。研究現場で何が起きているのか、早稲田が何を考えているのかをぜひ感じ取ってもらいたい」と述べた。
理工学術院長の山川宏教授は「グローバルロボットアカデミアの母体は理工学術院だが他学部の人も参加してくれている。韓国、イタリア、ドイツ、アメリカ、エジプトなど世界各国の大学とも連携しながら研究をすすめている」とGCOEについてアピール。新RTフロンティアについては「市民の人が気楽に来られて中の様子が見られる『知の発信』としては良い場所だと思う。ホームページなどからだけでは分からない成果を見て欲しい」と述べた。
早稲田大学理工学術院グローバルCOEプログラム「グローバル・ロボット・アカデミア」拠点リーダーである藤江正克教授は新RTフロンティアが以前は日産のショールームであった場所であることにふれて、「プロが作った展示場なので早速反響があった。ここはロボット研究の成果を触って味わっていただこうという場所。早稲田のロボットは町の皆さんと一緒に考えながらこれからもやっていきたい」と述べた。実際、「新RTフロンティア」では外からも展示されているロボットの姿が見える。
 |  |  |
| 早稲田大学副総長 橋本周司教授 | 早稲田大学理工学術院長 山川宏教授 | 拠点リーダーの藤江正克教授 |
●RT機器
このあといくつかの研究内容紹介があった。実際に動くものは、いわゆるロボットというより、ロボット技術を応用した機器類のほうが多い。
「左右速度差付きトレッドミルを用いた片麻痺歩行訓練システム」は片麻痺患者に歩行訓練を行なうための機械だ。脳卒中等で片側の足が麻痺してしまうと、どうしてもそちら側をかばってしまったりすることで、麻痺側の足の接地時間が短くなる。その状態のまま歩行を続けると、健康な側の足や腰にも負担がかかってしまう。よってある程度は修正する必要がある。この機器では理学療法士がベルト速度を調整し、健側の足の接地期の長さと麻痺側の接地期の違いをビジュアルにリハビリ者に示すことで、麻痺側の接地時間を伸ばすことを促す。
力センサーなどを用いず、電流値の変化を見ることで接地時間を推定しているので、安価にすることができる点が特徴だという。できれば15万円以下程度での製品化を目指したいとのことだ。
 |
| 【動画】左右速度差付きトレッドミルを用いた片麻痺歩行訓練システムのデモの様子 |
「迅速簡易超音波診断法(Focused Assessment with Sonography for Trauma:FAST)」は交通事故等の外傷患者を対象に救急車の中で医師による超音波検査を遠隔から実施するためのシステム。超音波検査はプローブを医師が操作して診断を行なわなければならないが、遠隔操作可能なプローブを患者の胸腹部に装着して搬送中の救急車の中で行なうことで救命に要する時間を短縮しようとするものだ。この機器では内出血が溜まりやすい4カ所にターゲットを絞り込んで、診断を行なう。
超音波プローブを支えるロボットの動作はiPhoneなどから行なうことができる。現在、動いている車の中で実際に装着して遠隔から操作してみるなどのテストを行なっているとのこと。
 |  |  |
| 遠隔エコー診断支援ロボット | ロボット本体にプローブを差し込んで使う | iPhoneなどから操作できる |
 |
| 【動画】FASTの動作の様子 |
視覚障碍者向けの力覚方向提示装置「Force Blinker2」。白杖の先端に回転する重りを内蔵した本体を取り付けて用いる。前後左右の方向を振動で教えてくれる。実際に握ってみると、確かになんとなくどちらの方向を示しているのかは分かる。
ただし方向の見極めには馴れが必要で、方向認識率は現在、視覚障害者で84.0%、晴眼者で31.6%。悩ましいのは、その目標値をどうやって決めればいいのかが分からないことだそうだ。仮に99%にしても、間違えた1回が致命的な角だと困ったことになってしまう。一方、方向が怪しいなと思ったときはいつでも繰り返し確認できるので、1回の認識率は低くてもいいのかもしれない。なかなかその見極め基準そのものを定めることが難しいという。今後は実用を目指して軽量化のほか、音など他の感覚刺激も組み合わせることを想定している。
 |  |
| 力覚方向提示装置「Force Blinker2」 | 中に回転する重りが入っていて、その遠心力による振動で方向を伝える |
段差を乗り越えることができる倒立二輪車のデモも行なわれた。高いところからポンと降りてもバランスし続けることができる。空中に浮いているときに車輪を回転させて、そのトルクでバランスする。
 |
| 【動画】高所から降りてもバランスする倒立二輪車 |
腕の振戦(ふるえ)を抑えるためのRT機器は、原因不明の「本態性振戦」に悩まされている高齢者向けの機器。スパイラル形状の装具が特徴的だ。手首部分につけた筋電センサで自分自身の動かしたいと意図した随意動作と、不随意なふるえの動きを検出・分離して、意図した動作だけを行なえるように支援することができる。ごく軽量で弱いトルクしか発生しないモーターしか使っていないので安全だという。
「WB-4(Waseda Bioinstrumentation system No.4)」は3軸加速度センサー、3軸ジャイロスコープ、3軸地磁気センサーなどを内蔵したセンサーで、人の動きをキャプチャーしたり、VR機器への応用が考えられる慣性計測ユニット(IMU:Inertial Measurement Unit)。重さ7gと軽量でBluetooth内蔵。既にベンチャーを設立し、商品化している。
 |  |  |
| 振戦を抑えるための機器。手首部分に筋電センサーがある | 随意動作と不随意なふるえを分離する | IMU「WB-4」 |
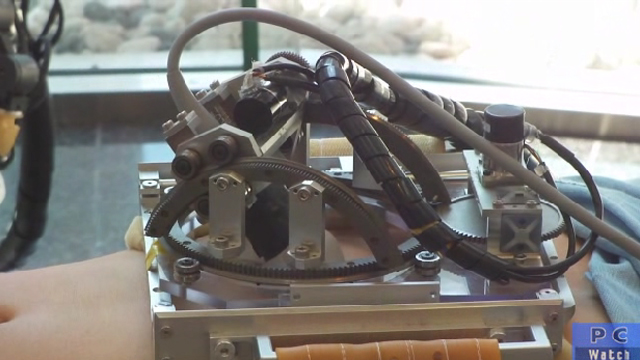
オーラル・リハビリテーション・ロボット「WAO-2」は、顎関節症などに対するマッサージを行なうロボット。高西淳夫研究室と朝日大学歯学部で共同開発した。二足歩行ロボットに不整地を歩かせるための仮想コンプライアンス制御をマッサージに応用したもので、ロボットの先端部には6軸力センサがあり、力制御で柔らかく先端を動かすことができる。また、2kg以上の力がかからないようにメカニカルな仕組みも持っている。製品化するためのパートナー企業を募集中とのことだ。
 |  |  |
| オーラル・リハビリテーション・ロボット「WAO-2」 | 顎にマッサージを行なうロボット | 「WAO-2」によるマッサージを受ける高西淳夫教授 |
 |
| 【動画】WAO-2と高西教授によるデモンストレーション |
早稲田大学理工学術院の松下詩穂氏によれば「新RTフロンティア」は今後1カ月に1回以上のペースでイベントを行なうとのこと。一番近い一般公開日は9月30日(日)13時~16時。ロボット技術を応用した医療・福祉支援の研究を行なっている早稲田大学理工学術院藤江研究室のメンバーにより、歩行や立ち上がり等日常動作支援ロボットのデモのほか、歩行動作計測や診断が予定されている。特に厳密なスケジュールその他があるわけではなく、ふらっとやって来て体験できるとのことだ。問い合わせ先等は下記の「グローバル・ロボット・アカデミア」ホームページから。
ロボット研究のみならず大学での研究一般も、社会から求められる役割がゆるやかに変化しつつある。早稲田大学にほど近い「新RTフロンティア」が、実際に触れ合い話し合うことで、一般人だけではなく研究者のほうも、互いに刺激を与え合うような場となってくれることを希望する。