■森山和道の「ヒトと機械の境界面」■
 |
| 公開された月面探査ローバーと東北大学 吉田和哉教授 |
合同会社ホワイトレーベルスペースは8月29日、月面探査ローバーのプロトタイプ発表会を行った。ホワイトレーベルスペースは、民間資本で月面探査に挑戦する「Google Lunar X Prize(グーグル・ルナー・エックスプライズ)」に日本から挑戦する唯一のチーム。会見にはローバー製作を担当する東北大学の吉田和哉教授ら関係者が出席、初めて月面探査ローバーを実働できる状態で公開した。
「グーグル・ルナー・エックスプライズ」とは、民間資本での宇宙開発促進を目的として1995年に設立されたX Prize財団とGoogleが共同開催する宇宙開発賞金レース。ミッションは、民間調達した開発資金によって2015年12月31日までに月面に着陸してローバーを500m以上走行させ、「Mooncast」と呼ばれる規定のHD画質の動画・静止画を地球に送信すること。2007年にGoogleがスポンサーとなり、総額3,000万ドルの賞金を出すことで話題となった。最初に達成したチームには優勝賞金2,000万ドル、2位には500万ドル。そのほかアポロ宇宙船の痕跡そのほかを発見した場合はオプションとして総額500万ドルが追加される。2011年8月現在では、世界18カ国から28チームが参加している。
このうち、日本から参加しているのはホワイトレーベルスペースのみ。日本だけでなく、ヨーロッパ各国からなる共同チームの一員というかたちだ。主にヨーロッパのチームが着陸船を開発、日本チームが月面探査ローバーを開発する。現時点では打ち上げロケットにはインドの「PSLV XL」、ロシアの「ソユーズ・フレガート」、アメリカの「ファルコン9」などを想定している。月まで3日かけて飛行して、月周回軌道には入らず、直接、月面へと降下・着陸する。
着陸予定地点は起伏が比較的少ない月の表側にある「静かの海」の赤道付近、南緯3度、東経19度を予定している。到着時刻は電子機器への熱の問題を考慮して温度条件の厳しくない月時間の早朝とする(月時間の一日は4週間に相当し、月面では昼が2週間、夜が2週間続く)。着陸後、ローバーはチェックを行ったあと、月着陸船からスロープを使って降りて、一週間ほど稼働させる予定だ。規定ミッションをクリアしたあとは、独自のミッションも予定しているという。2014年のミッション達成を目指す。詳細は同社のウェブサイトに詳しい。
X Prize財団はこれまでにも民間による最初の有人弾道宇宙飛行を競う「アンサリ・エックスプライズ(Ansari X Prize)」を実施している。2004年10月にスケールド・コンポジッツ社がこのミッションを達成し、賞金1,000万ドルを獲得、その後、宇宙旅行会社ヴァージン・ギャラクティックが改良型の「スペースシップ・ツー」を開発して、2012年の宇宙旅行商業サービスを目指している。
 |  |  |
| 賞金総額3,000万ドル | ミッション要件 | ホワイトレーベルスペースの予定スケジュール |
 |  |  |
| エックスプライズ財団会長 ピーター・ディアマンデス氏からのビデオメッセージも紹介された | ヴァージン・ギャラクティックは既に宇宙観光事業を展開中 | その他のX Prize |
 |
| ホワイトレーベルスペース・ジャパン代表執行役員CEO 袴田武史氏 |
ホワイトレーベルスペース・ジャパン代表執行役員CEOの袴田武史氏は、1927年に大西洋単独無着陸飛行を成し遂げたチャールズ・リンドバーグの挑戦も賞金25,000ドルの「オルティーズ・プライズ」という賞金レースだったことを紹介。それが航空機産業を大きく前進させたと述べて、エックスプライズの取り組みを紹介した。
ホワイトレーベルスペースは2008年に発足。着陸機開発リーダーであるオーストラリアのアンドリュー・バートン博士が中心となってオランダで立ち上げられた。その後、グーグルルナーエックスプライズへのチーム登録、東北大学吉田教授の参加、バートン氏来日を経て、2010年9月に日本法人が設立された。メンバーは50名以上いて参加国も10カ国以上。宇宙開発の専門家だけではなく、宇宙というキーワードをもとに、コンサルや映像作家など多様なメンバーが参加しているという。日本法人代表の袴田氏もジョージア工科大学で航空宇宙工学の修士号をとったあと経営コンサルタントという経歴の持ち主である。
ホワイトレーベルスペースは既存技術を使い、必要最小限のスペックを低コスト、短期間での開発を実現することを目指している。だがそれでも費用はそれなりにかかる。ホワイトレーベルスペースでは打ち上げ費用と開発費込みでコストを50億円と見積もっている(うち半額が打ち上げ費用)。このうち9割を、ファンクラブの会費や応援金のような形で、個人の寄付で賄いたいと考えているという。
 |
| ホワイトレーベルスペース・ジャパン執行役員COO事業戦略担当 中村貴裕氏 |
資金調達の事業戦略については、ホワイトレーベルスペース・ジャパン執行役員COOで事業戦略担当の中村貴裕氏から説明があった。同社はこのチャレンジを通じた資金調達だけではなく、チャレンジを通じて生まれた技術や製品の販売、宇宙教育やエンターテイメント、宇宙開発コンサルティングなどを行っていくという。個人に対しては会員費や応援金の対価として、新しい形の宇宙開発として、宇宙を身近に楽しめる情報を提供するとした。ローバーのキャラクター化なども考えていくという。なお市場調査の結果、宇宙開発に対しては1人あたり1,440円を支払う意志があると出ているという。
しかしながら実際に払うとなると、その金額はさらに下がってしまうと考えられる。そのため、魅力ある特典として応援金として「ルナマイレージ」が貯められるようにする。このマイレージを使うことで特典へ応募できる。特典としては、たとえば月面探査ローバーの操縦権を考えているという。マイレージを買い占める大人がいそうだ。またファンミーティングやクラブイベントなどのほか、開発プロセスそのものを楽しんでもらうために、巻き込み型のプロモーションを展開すると説明した。アイドルのファンクラブのようなものを基本的に想定しているようだ。
 |  |  |
| 個人に対して「新しいかたちの宇宙開発」を提供 | 15歳から70歳の男女3033人を対象に行ったウェブアンケートでは一人当たり平均1440円を払う意志があるという | 実際に支払う金額とのギャップを埋めるための特典としてルナマイレージ |
●小型衛星開発のノウハウを活かしたシンプル軽量な月面探査ローバー
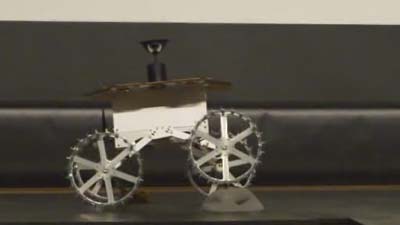
ここで今回の発表の目玉である月面探査ローバーが登場し、開発者である東北大学教授でホワイトレーベルスペースジャパンCTOの吉田和哉氏が解説した。このローバーの特徴は軽量シンプルであること。ミッション達成を第一に考えた設計となっている。46×49×55cm(幅×奥行き×高さ)。重量は10kgで1kgほど余裕のペイロードがある。
 |
| 【動画】月面探査ローバー登場 |
 |
| 【動画】一端停止したあと再びステージに向けて前進、その場回転 |
4つの車輪は着陸機に搭載しているときは小さく折り畳んでおいて、着陸後に広げることで、格納体積に対して車体の幅を大きくとれるようにした。また運動性能をあげるために車輪直径をできるだけ大きくするため、直径20cmとした。車体は起伏のある地形に対応するために受動サスペンションが柔らかく効く構造になっていて、車輪直径の半分である10cm以下の障害物までなら乗り越えることもできる。各車輪はマクソン製モーターで駆動するが、それもリスクを減らすため最小限の4つとした。
およそ分速10mで移動できるので、ミッション要件である500mの走行には、うまくいけば50分あればクリアできる。操作は着陸機経由で無線で行なうことになるが、時間遅れもあるので、ある程度の自律性を持っている。障害物検知や3次元マップ作成のため赤外線レーザーレンジセンサーを実装する。
 |
| 【動画】障害物を乗り越える |
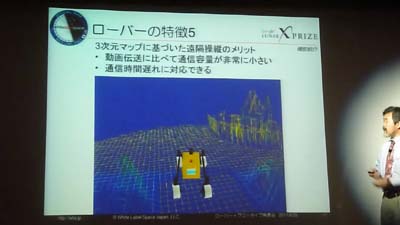 |
| 【動画】3次元マップをもとに操作することも可能 |
特徴は全方位カメラ。一度に360度の画像を撮影することができるカメラで、日本のロボットのナビゲーション用途にはよく使われている。だが海外では今ひとつ普及していないため、ぜひこれを使ってアピールしたいと考えているという。また映像を見せることで、操作のときの臨場感も増すと考えているそうだ。今回のプロトタイプには実装されていないが、今後技術検討のために開発されるエンジニアリングモデルや実際に使われるフライトモデルには前後に小型のHDカメラを取り付ける予定だ。
この構造では月面から地球を見ることは地球が水平線ぎりぎりにあるとき以外は難しそうだが、そのような要望にもファンミーティングや他のエンジニアとのミーティングを通して、取り入れられるものは取り入れていく予定だという。最大の課題は前述のとおり、月面の激しい温度差と熱。温度条件が厳しくなる前にミッションをクリアしてしまうことを目指す戦術をとる。
 |  |  |
| 降り立たんだ状態から展開する | 無線遠隔操縦と自律機能の組み合わせ | 上部には全方位カメラ |
 |
| 東北大学 吉田和哉教授 |
吉田教授は1960年生まれ。8歳から9歳になるときにアポロ月面着陸をリアルタイムで見た世代で、大いに感銘を受けたという。宇宙ロボットの開発に長年従事しており、1996年から東北大学で研究を行なっている。最近報道されたものとしては大気上層の発光現象「スプライト」を観測するための小型地球観測衛星「雷神」ならびに「雷神2」の開発・打ち上げで知られる。このほか小惑星探査機「はやぶさ」のプロジェクトにも、サンプル採集機構のチームとして参加していた。
ロボットを使った月面探査の研究は1997年くらいから行なっているという。月面はレゴリスと呼ばれる細かい砂状粒子で覆われているが、車輪がスリップしてもリカバーするための技術開発などを行なういっぽう、学生対象にネバダ砂漠でのモデルロケット打ち上げとロボットを組み合わせた実習など教育面にも力を入れている。
今回メンバーの一員として加わるきっかけは、前述のピーター・ディアマンディス氏が1988年に創設した国際宇宙大学で、吉田教授はそこに非常勤講師として今も参加していたこと。彼の、「ぜひ宇宙に行って世の中を変えよう」と熱烈に話をする様子に感銘を受けたという。そこで宇宙大学でコースを受講したこともあるアンドリュー・バートン氏と一緒に国際協力チームを作ることで意気投合したそうだ。吉田氏は「夢は必ず実現する。このローバーは第一歩。夢を実現していくプロセスを共有して、ぜひ応援頂きたい」と語った。
 |  |  |
| これまで開発してきたローバー | モデルロケット打ち上げ | 小型地球観測衛星「雷神」 |
●課題は資金調達
 |
| 夢の共有もまたグランドチャレンジ |
ホワイトレーベルスペースの資金調達はこれから。開発部品は調達できるものは一般市場から調達してインテグレートしていくが、それでも宇宙で使うものだとどうしてもコストは高くなるという。また打ち上げ費用は他のチームとの相乗りも考えているそうだが、一定限度以下には下がらない。このように最大の課題は明らかに資金であるため、今回もスポンサーや企業関係者へのアピールという面の強い発表会だった。率直にいうと筆者個人は、月へ行く技術開発よりもむしろ資金の調達のほうが「大きな挑戦」となってしまっているような印象を受けた。
「グーグル・ルナー・エックスプライズ」ではその他の有力なチームとしてカーネギーメロン大学のレッド・ウィッテイカー(William(Red) L. Whittaker)教授を中心としたアストロボティク・テクノロジー(Astrobotic Technology)というところがある。レッド・ウィッテイカー氏はロボット業界の有名人で、2007年の無人ロボット車レース「Darpa Urban Challenge」で優勝したチームを率いたことでも知られる。アストロボティクは既にイーロン・マスク氏によるSpaceXのファルコン9を使って打ち上げる契約を結んでいる。ここが一番乗りの大本命であることは疑いなく、吉田教授も「抜きん出ている」と語る。
アストロボティクはアピールも強烈で、もちろん寄付も募っている。もし自分も含めた資金で月面探査をと考えるのであれば、このチームに寄付したほうが賢明かもしれない。この意地悪な質問に対して資金調達担当の中村貴裕氏は、「なでしこジャパン」のようなチームになりたいと語った。国際協力チームではあるが、日本からの挑戦者たちを含む唯一のチームであり、みんなの応援を集めるような存在を目指していきたいという。それこそ「はやぶさ」のようにだ。しかしながら「はやぶさ」が注目を集めたのは帰還時であり、出発前ではない。注目を集めるにしてもそのための時間も限られている。実現のためにはかなり思い切った手段が必要になるかもしれない。だがなかなか名案が浮かばない、とうのが実状なのかもしれない。
同社の市場調査を見ると、半数弱の人たちは最初から宇宙開発を資金面で直接応援するつもりはないようだ。一方、かなりの金額を出しても良いと考えている人もいる。個人から寄付を募るのであれば興味を持っている層にターゲットを絞った戦略をとるしかないだろう。たとえば1人あたり1万円を募るのであれば、50億円に必要な人数は50万人となる。月へ行くにもカネ次第というわけだが、同時にそれは、人次第でもある。