|
| [an error occurred while processing the directive] |
|
ホンダ、機動性が向上した“走る”ASIMOを公開
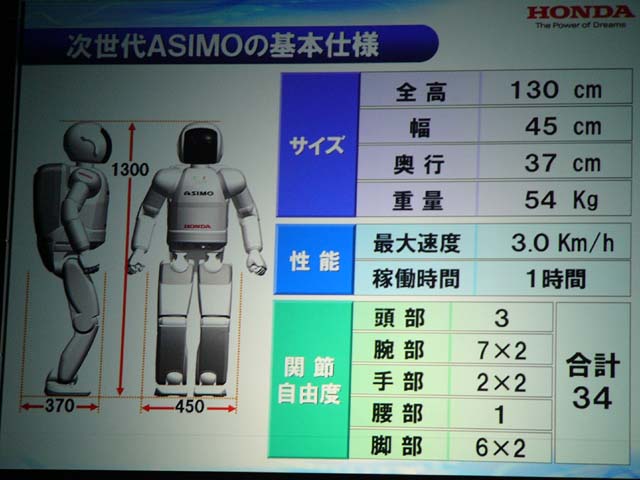
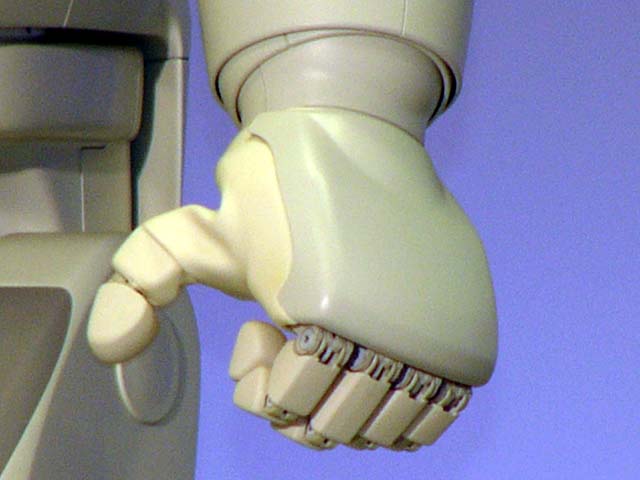
12月15日公開 本田技研工業株式会社は15日、環境認識能力と移動能力を向上させ、走ることもできる「次世代ASIMO」を発表した。 歩行速度を従来の1.6km/hから約2倍の2.5km/hに向上させ、人に遅れない歩行を実現。また、従来の二足歩行制御技術に加え、新たに上半身のひねりや曲げ、回転を積極的に利用することで、移動時に発生するスリップやスピンをキャンセルすることに成功。センサー入力からモーターへの応答時間を従来の4倍に高速化して素早く着地衝撃を吸収する技術と合わせ、時速3kmの走行を実現した。 また、稼動時間も従来の30分から1時間に伸ばした。関節自由度は従来の26から34に増やし、より人間らしい動きを実現。手には親指軸と力センサーを追加、人間の手を握って、その力に合わせて握手したり、手を引かれたり押されたりするのに合わせて動くことができる。
走行のためにはジャンプしなければならない。そのために地面を蹴らなければならないわけだが、実際には地面を蹴ると、床との設置面が少なくなるので、スピンとスリップが発生してしまう。そのため最初はうまく跳べなかったという。人間は無意識のうちにそれを制御しているわけだが、次世代ASIMOでは上体の動きでスリップをカバーした。 「氷の上を歩こうと思うと人間でも自然に上体がかがみますよね。それを応用しました」(開発責任者の重見聡史氏)
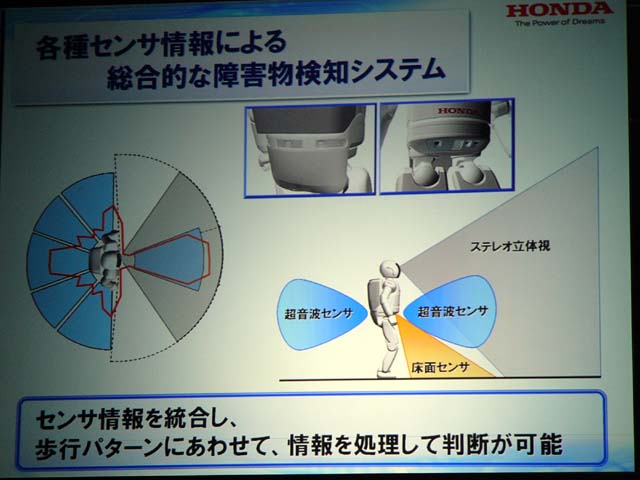
●環境認識技術も向上 重見氏は、新技術のねらいは「人間と共存・協調するために、実環境のなかで素早く機敏に行動すること。具体的にはスピーディーな動きができ、自律して連続して移動できること、人に合わせた動きができること」だと述べた。 今回の次世代ASIMOは、外界、周囲の状況をセンシングする技術も大幅に向上している。自己位置を補正する赤外線カメラを腰に持ち、逆光でも障害物を検知できる高いダイナミックレンジカメラを頭部に、床の凹凸を検出するためのカメラは腰に装備。人や壁を検出する超音波センサーは胴体についている。センサーから得られた情報を元に、リアルタイムの障害物検知を行ないながら最適な歩行パターンを算出することができる。 また、従来のASIMOは歩行していると、少しずつ位置がずれていた。そのため時折、いったん停止して位置を補正する必要があった。今回のASIMOでは自律連続移動中の「自己位置補正機能」を持ち、立ち止まらずに位置を補正していくことができるようになった。 また「障害物回避機能」も持っている。地図情報とセンシング情報をリンクすることで、障害物があっても回避行動を行ない、自動的にルートを再設定できる、 「自己位置補正機能」と「障害物回避機能」、この2つの技術によって、目的地を指示するだけでASIMOは自分で歩いていくことができるようになったという。 走行のために大幅に向上した運動機能は、走行時だけではなく、例えばつまづいたときに、さっと足を出してバランスを取ることができるなど、二足歩行全体の能力向上にも寄与しているという。 なお、歩行演算能力自体は10倍、モーター応答速度は2倍、体内の通信速度はおよそ10倍になっているという。モーターも軽量化し、ICも専用化されている。CPUの実際のクロック数などは公表されていない。OSは従来通り、VxWORKSだ。 ●「実社会環境」のなかで鍛えられたASIMO ホンダは'86年から二足歩行ロボットの研究開発を始めた。ASIMOは2000年11月20日にデビュー。ROBODEX2000で一般公開、同年12月にはレンタルを開始。2002年12月にはジェスチャ・ポスチャ認識機能等を搭載し知能機能が向上。2003年4月のROBODEX 2003では銀色の高速歩行ASIMOが発表された。
ホンダの伊東孝紳常務(本田技術研究所社長)は会見で以下のように述べた。 「ホンダは試行錯誤の結果、安定歩行技術を確立し、二足歩行ロボットの技術と可能性を世に問い続けてきた。現在ではインテリジェント・リアルタイム自在歩行や、音声認識や人のしぐさに応答する機能を実現し、レンタル、国内外各地でのイベントの活躍を通じて多くの人に認識されてきており、たいへん高い評価をいただいている。ASIMOは間違いなく我々の夢のある将来を切り開く技術だと確信している」 また、移動速度の高速化や環境認識能力の向上、それに伴う連続移動能力については「2000年12月以来、イベント出演やレンタル事業など『実社会環境』のなかで得られたさまざまな情報を開発現場にフィードバックして、より実用化に近づけた技術」だとし、「これからもホンダはさらなる運動能力や知能の進化に向けて強力に開発を進めていく。また実社会での活用を通して、ASIMOをさらに成長させていきたい。皆様の忌憚ないご意見をいただきたい」と語った。
□ホンダのホームページ (2004年12月16日)
[Reported by 森山和道]
【PC Watchホームページ】
|
|||||||||||||||||||||||||||||||