 |


■森山和道の「ヒトと機械の境界面」■人間の身体、行動、心理のデジタル化
|
 |
| 金出武雄DHRCセンター長。世界で初めて自動顔認識システムを開発し、CMUの無人自動車、「仮想化現実(Virtualized Reality)」などでも知られる。著書に『素人のように考え、玄人として実行する』(PHP研究所)がある |
3月12日、独立行政法人産業技術総合研究所デジタルヒューマン研究センターによって「デジタルヒューマン・ワークショップ2004」が、お台場の日本科学未来館で開催された。科学技術振興機構 戦略的創造研究推進事業「高度メディア社会の生活情報技術」領域デジタルヒューマン基盤技術の平成15年度の成果報告会として開催されたもので、メイントピックは「人を見守るデジタルヒューマン」。研究リーダーはロボティクスや画像認識で世界的に知られる金出武雄DHRCセンター長。
「デジタルヒューマン」とはデジタル化された人、つまり「人の身体モデル」、「行動モデル」のこと。同時にそれを活用したシステムのことも指す言葉としてワークショップでは語られていた。人を観察し、人の内部状態を推定できる、すなわち人間行動を理解するシステムができれば、計算機は人間により適応的にふるまうことができるばかりか、行動履歴と行動モデルから、未来の行動を予測することもできる可能性がある。事故が起きやすいシチュエーションを予測し、事前にそれを防ぐことができるようにインタフェースや住宅などの設計にも応用できうる可能性のある研究分野だ。
●キーノートスピーチではマイクロソフト・リサーチのジョン・クラム博士が講演
デジタルヒューマン実現のためには、人間の行動をセンシング、計測、モデル化する技術、データベース化する技術、そして実空間で動く機械への実装などが必要になる。各セッションでは、行動観察のためのセンサルームなど現実を計算機で扱うためのヴァーチャル化技術、人間の行動計測技術の現在や可能性が語られた。ワークショップのあとにはオープンハウスも開かれた。
 |
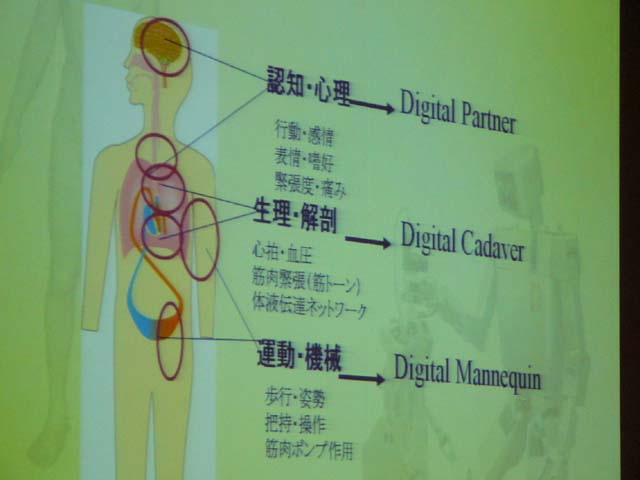 |
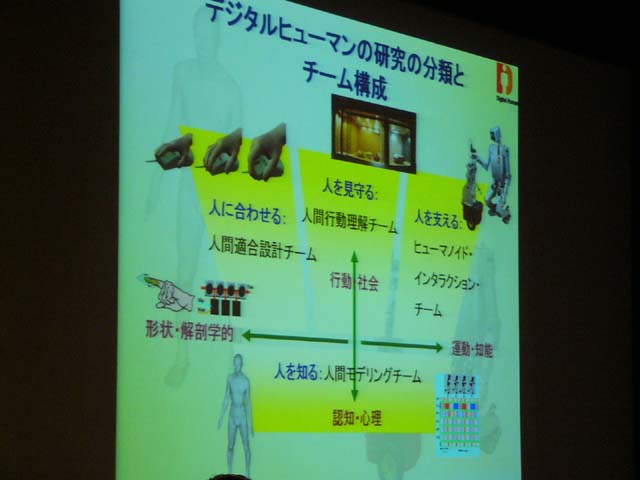
| 研究分類。人に合わせることを目的とした「人間適合設計チーム」、人を見守る「人間行動理解チーム」、人を支える「ヒューマノイド・インタラクションチーム」、人を知る「人間モデリングチーム」からなる | 認知・心理面をデジタル化すれば「デジタル・パートナー」ができ、生理・解剖的側面をデジタル化すれば「デジタル解剖用死体」、運動・機械面をデジタル化すれば「デジタル・マネキン」となる |
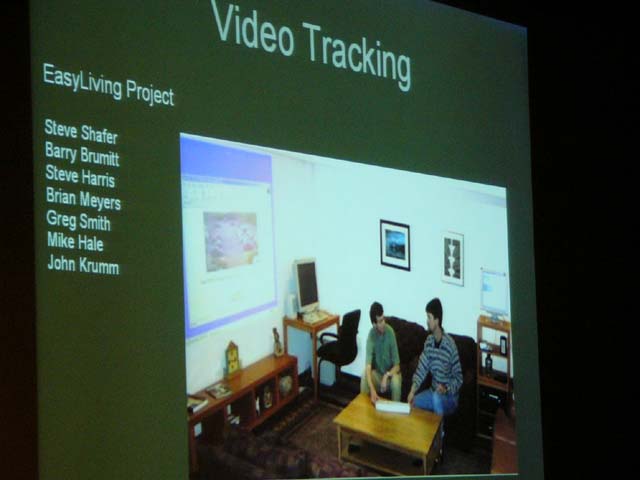
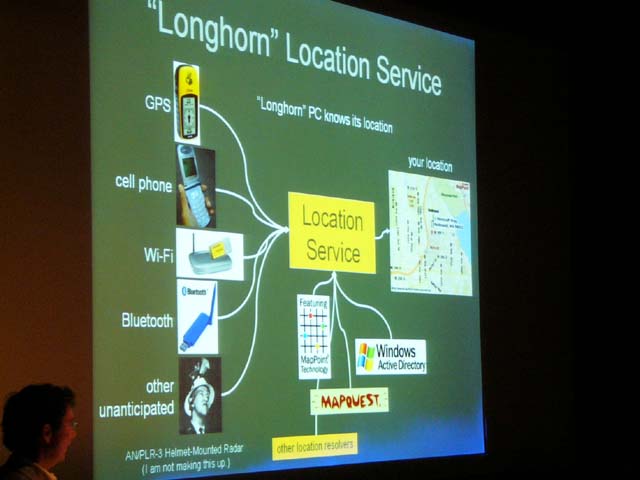
まずキーノートスピーチとして、マイクロソフト・リサーチのジョン・クラム博士が「Location Aware Computing」と題して講演した。「SPOT」リストウォッチを右手にはめて登壇したクラム博士は、マイクロソフトで行なわれているコンテキスト、あるいはロケーション・アウェアなコンピューティング実験の現状についてマンガ混じりのスライドと実験デモビデオを交えて説明し、次世代OS「Longhorn」ではコンピュータ同士がお互いの位置を知り、通信しあってサービスを提供すると述べた。
デモンストレーションビデオは、「EasyLiving Project」というもので、部屋に入ると何もしなくても明かりがつき、ソファに座ると目の前にプロジェクターによって情報が提示され、モニターの前に移ればそれを自動で感知し、知人が入ってきても誰が入ってきたかちゃんと認識するといったもの。部屋のなかの位置センサやカメラ、ソファに仕込まれた感圧センサーによってそれぞれ位置が特定されれば、そういったことができる、というわけだ。
 |
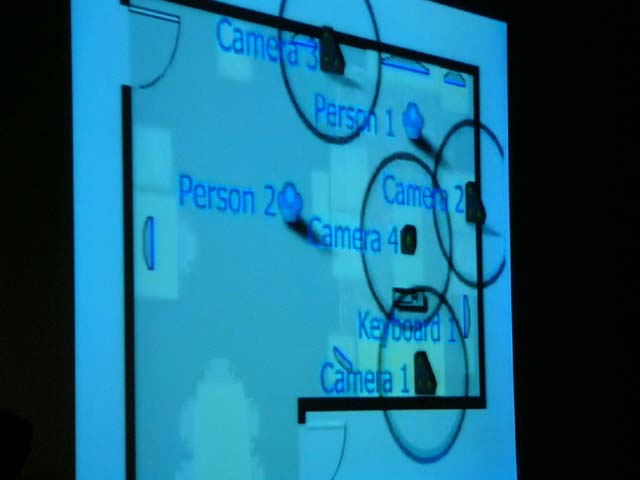 |
| マイクロソフト・リサーチのクラム博士が示した「EasyLiving Project」の様子。主にビジョンによって部屋のなかの機器や人がセンシングされている様子を示す。精度は数cm。また、センシングした情報から、人と機器、人と人との関係などコンテキストを推定することも可能 | |
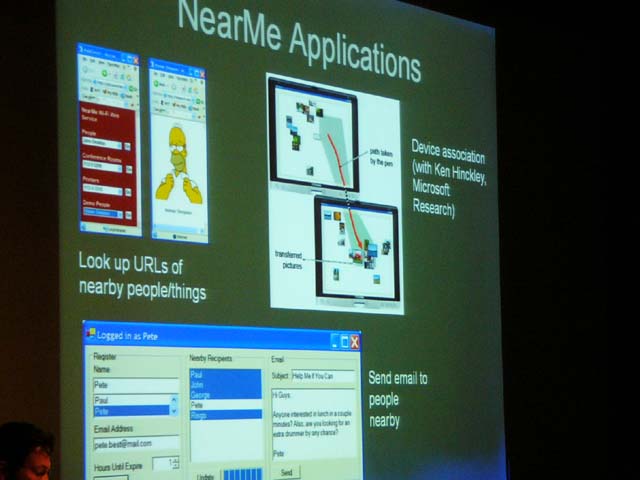
そのほか、SmartMoveXというアクティブバッジシステムによる行動履歴収集や、無線LANシステムを使った「LOCADIO」というロケーション提示システム、物理的に近くにいる人にメールを投げたり関連URLを収集する「Near Me」アプリケーションなどについて述べた。
 |
 |
 |
| Longhornのロケーションサービスイメージ | Near Meアプリケーション | マイクロソフト・リサーチのJohn Krumm博士 |
●超音波を使った行動計測センサー「ウルトラバッチ」
続けて「日常空間における人間行動の観察技術とシミュレーション技術」として西田佳史 DHRCチームリーダーが講演した。生活行動をシームレスに記述するためには、安価で簡便なセンサーが必要である。そのための超音波を使った行動計測センサー「ウルトラバッジ」を開発したと報告した。2cm~8cmの精度で対象の位置を知ることができ、従来技術のおよそ1/100のコストですむという。また、そのセンサをつけたスマートルームも公開された。
 |
 |
| 人を見守るデジタルヒューマン概念図 | 西田佳史 DHRCチームリーダー |
 |
 |
| ポータブル超音波3次元タグシステム。壁に貼られたのが受信装置で、左に見えているのがキャリブレーション装置 | スマートルーム。壁や天井、そして室内のオブジェクトにセンサーがつけられている。物体がどこからどこへ移されたかといった軌跡を追うことができる |
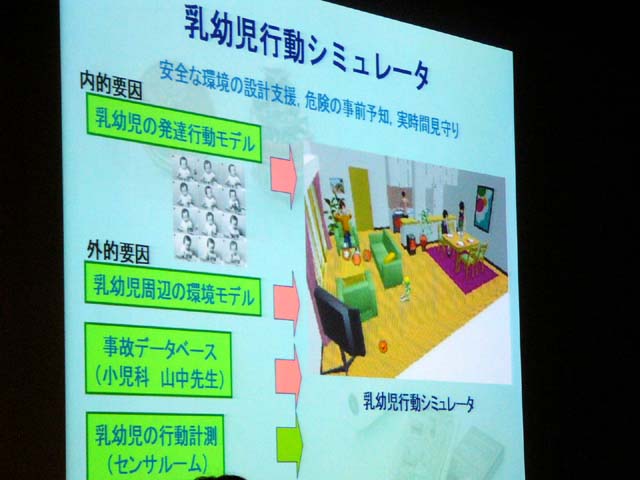
応用としては、病院や老人ホームでの行動モニター、サーバールームの入退室モニター、工場、倉庫、住宅などの防犯が挙げられた。現在、八王子の老人ホーム「愛全園」で高齢者事故防止用システムとして導入され、行動データを蓄積中だ。超音波を使って人の位置を確認しているだけなので、低プライバシー侵害の人位置計測システムでもあるという。今後はさらに住宅内の乳幼児事故防止や、行動を伴った英語教育等にも応用していくそうだ。
 |
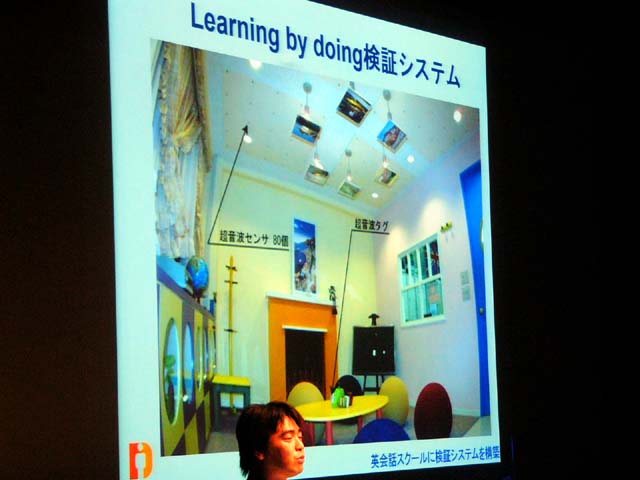 |
| 乳幼児行動シミュレーター概念図。乳幼児の月齢に応じた行動発達モデルと環境モデルを組み合わせ、事故データベースと参照することで、事故の予測をたてる | 「Learning by doing」という英語教育システム。天井に80個の超音波センサをつけて物体と人間の位置を認識する。物を動かすとその動きに応じた動詞が発音される。実際のデータ収集はこれからだそうだ |
●人間の行動動機を理解して危険を回避
続けて東京大学大学院の佐藤知正教授が「ロボティックルームとハイパーロボット」と題して講演。佐藤教授は、'92年以降、部屋中にセンサーやカメラをおいたロボティックルームの研究を行なっていることで知られ、最近は、行動記録・行動蓄積の研究を行なっている。
人を見守るためには、人間を拘束しない環境型システムが向いているという。「生活行動ディジタルコンテンツ構築ソフトウェア」を目指し、日常生活の行動要約を行なうことを目指している。具体的には行動計測の結果を10分ごとにぶつ切りにし、音声認識などでも使われているHMM(Hidden Markov Model)を使って学習させる。そうすると、データからある状態遷移確率を持った人間行動モデルを作ることができ、さらにモデルから予測を行なうことができるという。たとえば、日常的な行動と、そうでない行動の区別がつくわけだ。
 |
 |
| 佐藤知正教授 | いつも人間のそばにいて、人間のコンテキストを把握する「ハイパーロボット」概念図。ロボットシステムは環境化する、という |
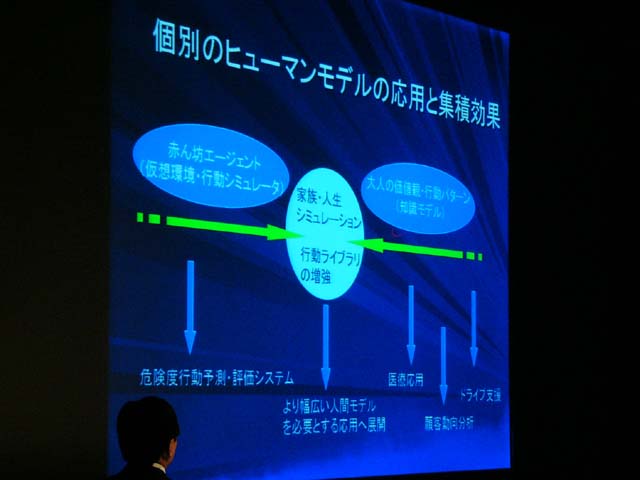
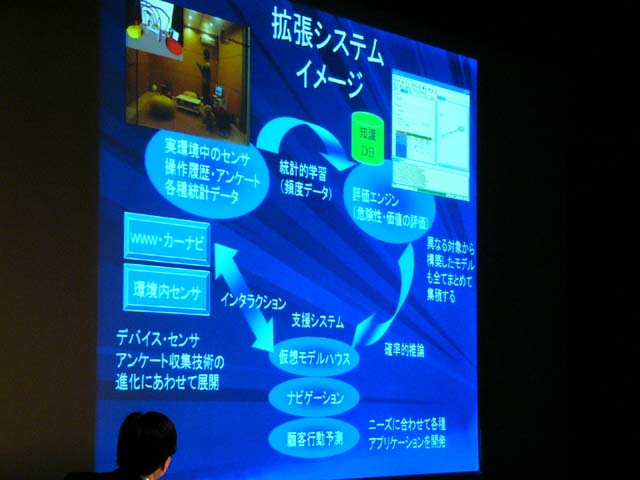
続けて、DHRC主任研究員の本村陽一氏が「乳幼児事故予防のための知識データベースと事故予測モデル」と題して講演した。見守り支援を行なうための、データ収集から先の展開の話だ。人の行動情報や事故履歴データを収集することで、対象と人の属性情報をオントロジーとしてSQL、RDF形式で記述・蓄積し、ベイジアンを使った確率的推論モデルで予測を行なっていくことを目標としているという。「行動の意味構造」を知るためのミドルウェア開発が目的である。
課題は人間の状態遷移確率が何によっているか、すなわち人間の行動動機を把握すること。将来的には乳幼児だけではなく幅広くそのモデルを家族にまで拡張、「デジタルファミリー」を作ることで、蓄積された知識を「仮想モデルハウスによる住宅設計支援」など多方面に反映させていきたいという。「人のIDを集めるのではなく属性だけを展開してそれに基づいて情報収集、予測を行なうことが重要だ」と述べた。
 |
 |
 |
| ヒューマンモデルの展開の概念図。赤ん坊エージェントや大人行動モデルを組み合わせると、幅広い人間理解が可能になる | 知識DBと予測モデルを使ったシステムの応用可能性イメージ。様々な環境センサーからのデータを使って確率的推論モデルを構築、仮想モデルハウス、ナビゲーション、顧客行動予測を行なう | 事故後、保護者にヒアリングして事故状況を収集するためのTablet PCを使ったシステム |
この背景には、乳幼児の死亡原因の第一位が不慮の事故であり、事故予防に対しては何ら対策が行なわれていないことがある。緑園こどもクリニックの山中龍宏院長が「こどもの事故予防へのアプローチ」と題して、事故予防の必要性を臨床現場から訴えた。
たとえば誤飲や風呂場での事故などだ。以前、事故は予測できない避けられない「Accident」だったが、いまは予測ができ、予防可能な「Injury」という概念に変わってきているという。ならば知識を蓄え予測しなければならない、というわけだ。
山中氏は「セーフティ・サイト」 というウェブサイトを立ち上げ、事故予防の重要性について訴えていたところ、2003年の夏に西田氏から事故予防について教えてもらいたいという連絡があり、共同研究が始まったのだという。
今後は「Swaddle Engineering(見守り工学)」という概念を提唱し、事故を敢えて起こすような状況をシミュレーションし、臨床医の立場から、どうすれば事故を防ぐことができるか検討していきたいと述べた。Swaddleとは、もともと新生児が動かないように産着でくるむ行為のことだ。
●間違いやすさの原理を解明する
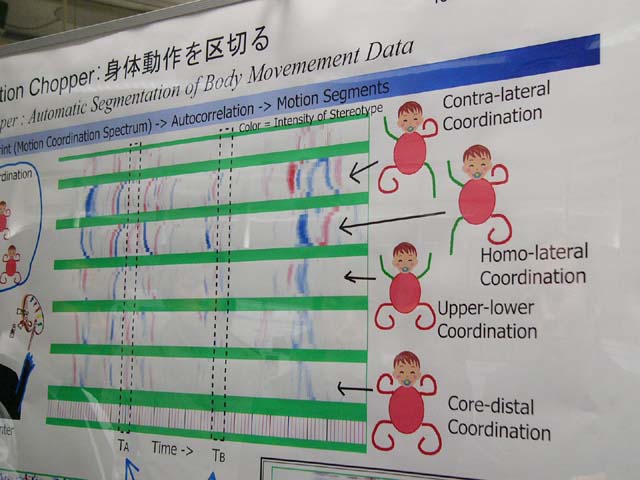
中田享DHRC研究員は「知覚・行動するデジタルヒューマン」として、術中患者の生理モデルや、人間の行動を分節化する技術ほかを紹介。人間の体にはいろいろな自由度があるが、実際には制約があり、バラバラに動かすことはできない。4つのフェーズがあると見なすだけで、行動の区切りを見つけることができるという。
また、世界中にある「STOP」の綴りミスである「SOTP」のGoogleイメージ検索結果を引きながら、人間の「間違え方」にも一定のパターンがあると紹介。人間には、つい間違えやすいボタン配置などがあるというわけだ。それを逆手にとれば「人間らしく間違えるデジタルヒューマン」を作ることができる。それができれば、シミュレーションが可能になる。しかも、一万回の試行を一秒以内で終えることが可能だという。これまで、計器盤の設計はかなり適当に行なわれていたが、数万回のトライアルを数秒で終えることができるならば、本当に使いやすいボタン配置などを設定できるようになるかもしれない。また、多様かつ特殊な条件の実験も可能になるという。
 |
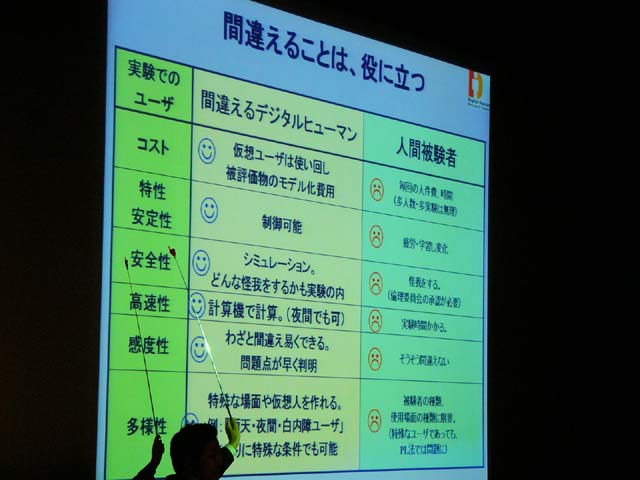 |
| この4種類で動作を分節化することが可能だという | デジタルヒューマンの利点。間違えられること、莫大な数の試行を行なえることがポイントだ |
 |
| 持丸正明 DHRC副センター長。人間の機能を知り、個人差を知り、人の機能と製品の相互作用を再現し、製品の事前評価に役立てることがデジタルヒューマンの目的だと講演 |
●人間の手を徹底解析する「デジタルハンド」
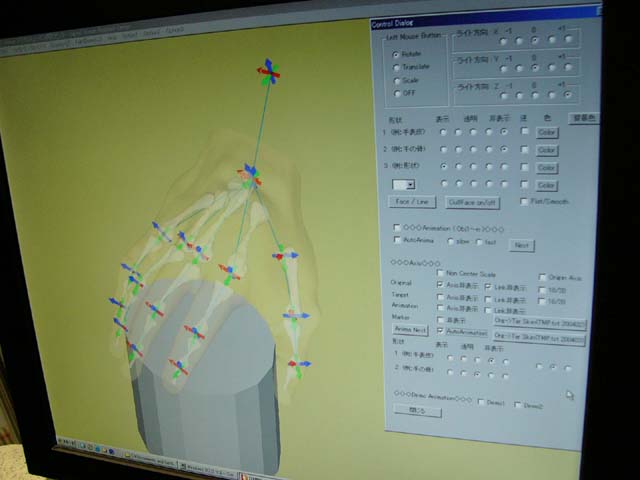
持丸正明 DHRC副センター長は「人に合わせるデジタルヒューマン - デジタルハンドとデジタルマネキン」と題して講演。現在DHRCでは身体の中でも複雑かつ重要な「手」に徹底的にこだわって、手のデジタル化を試みているという。
まず基本的な手の構造を再現した「標準手モデル」を作る。それを細分化した曲面モデルを使って計測点群にフィッティングしていくと、自動的にどの計測点が、どの指のどこに相当するか出てくるので、形状データは同時に機能データを持ったものになる。この上に「Skin Movement Artifact」という皮膚の変形モデルをのせると、骨に対して指表面がどのように動くかといったことも再現されるのだという。
このように、計測・分析から実際の機能を合成・再現するところにデジタルヒューマンの意義がある。デジタルハンドを使えば、たとえばデジカメのグリップ性やリモコンの操作性を、仮想評価することができるという。
デジタルマネキンはその全身版である。人間の関節構造やトルク限界などを与えて、本当にリアルな人体を作り、それで仮想評価を行なう。今後は、腱や筋の問題を取り入れ、人間が力を入れやすい部分や生体の変形などをより忠実に再現することを目標とするという。どこまでデジタル化すればその要求を満たせるのだろうか。人間の指1つとっても筋肉と骨しかないわけではないので、大変そうだ。
 |
 |
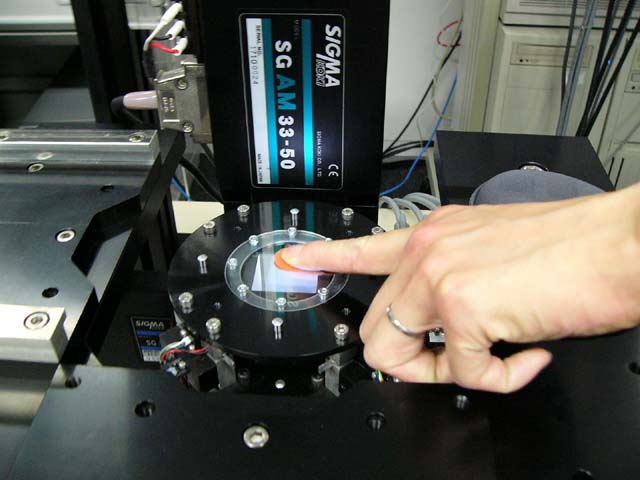 |
| デジタルハンド | 指先の変形具合を計測するための計測装置。人間の触覚機能を解析していきたいという | |
●人型ロボットには「人間」の知識が必要
加賀美聡 DHRCチーム・リーダーとジェームズ・カフナー氏は「人を支えるデジタルヒューマン」として、ヒューマノイドのありようについて講演した。
ヒューマノイドがなぜデジタルヒューマンなのか。「人間のことを知らない人工機械は危ない」。そのため、将来人間の近くで動くことを期待されているヒューマノイドは、人間の行動モデルを中に持ち、人間の行動をある程度予測することが要求される。でないと気が利くロボットにはならないというわけだ。
DHRCでは、実時間の100倍で歩行パターンを生成することにより、絶えず新しい目標を設定されてもリアルタイムに歩行軌道を生成することに成功している。
現在は、ヒューマノイド、あるいは人間が実際にどのように動いているかを確認するため、ZMPを精密に計測する下駄や力センサー内蔵の義足などを使って人間、あるいはヒューマノイドの動きを計測中だ。人間は微妙に上下動することで左右の揺れを低減させていることが分かったため、ヒューマノイドに実装してみたのだが、まだうまく行かないそうだ。
続けてジェームズ・カフナー氏が軌道計画や、人間の動きやその動きデータベースからヒューマノイド(またはデジタルヒューマン)の動きを自動的に生成するための手法について講演した。同グループでは今後、足裏の分布圧力が計測できるロボットをHRP-2を改造して作る予定だという。
この他、DHRCでは、転びそうになったときに、これまでのデータから倒れないためのデータセットを作り、そこから運動パターンを持ってくることで姿勢を維持する、といった研究も行なっている。シミュレーションではうまくいくそうだ。
 |
 |
 |
| 加賀美聡氏とジェームズ・カフナー氏 | 歩行や全身運動計画の実験に使われているH7。身長147cm、30自由度。CPUはPentium III×2。当日は残念ながら歩行デモはなし | 上半身型ヒューマノイドH3。スマートルームで位置認識されたオブジェクト情報を獲得して動作するための実験に使われている |
 |
 |
| 人間の歩き方を調べるための力センサ付き義足。今後はもっと薄くして、より自然な動きでのデータを取りたいという | 人間とヒューマノイドの歩行の違い |
●2008年には分散情報処理を用いたロボットを
松井俊浩 DHRCセンター長代理は「ヒューマノイドのための実時間分散情報処理」と題し、現在のヒューマノイドの現状と限界、そして今後のあるべき姿を述べた。
たとえばHRP-2は180本の信号線を持ち、信頼性も低い。消費電力や実時間制御といった基本的な面でも問題がある。そこでスカラー型とベクトル型の良いところを組み合わせ、複数スレッドを並列実行できる実時間処理用の新しいチップを使い、より高速な分散処理システムを導入した新しいヒューマノイドを2008年までに作りたいと抱負を語った。
全身30のノードに処理を分散させ、よりロバストで自由な歩行・動作、そして認識を実現することが目標だという。小型消費電力をねらった、モータモジュールに一体化したサーボ用プロセッサも開発する。また、さらに高速な処理ができるようになれば、現在のロボットのサーボ周期では不可能な力制御を行なうこともできるようになるという。
 |
 |
 |
| 分散リアルタイム処理制御用のRMT(Responsive Multi-Thread)プロセッサ。命令セットアーキテクチャはMIPS互換、4命令同時発行、512本のベクタレジスタ、8本の優先度付きマルチスレッド並列実行機能、各種I/Oを集積。センサネットワークプロジェクト2000-2004において慶應義塾大学理工学部が開発したもの。処理終了時間、通信時間を保証する機能を持つ。並列機能が最大に働いたときにはPentium 4の5倍以上の処理能力を持つが、クロックを300Mhzに抑えているためピーク消費電力は8W。0.5W程度での低消費電力運転も可能。現在設計中のヒューマノイド「HRP-3」改造型に搭載される予定だという | 松井俊浩 DHRCセンター長代理。ロボットが10mの障害物回避軌道を1秒で生成するためには現在の4倍、不整地でバランスを崩さないためには10倍の処理速度が必要だという。また、網膜細胞一個の処理演算が1,000Mipsだとすると人間の脳は100,000,000Mipsの演算能力を持つと推定され、現在のPCで動くヒューマノイドの処理演算能力3,000Mipsでは遠く及ばないと述べた | |
●実環境では不可能な事象をテスト可能に
最後に金出センター長が「人間の機能、形態、心理などをモデル化したい。あり得る状況のバリエーションを事前に知ることができれば、あり得る事故をシミュレーションで発生させ、実環境ではテストできないことが実験できるようになる。従来の科学や工学に乗りにくい心理や行動を計算機で表現するにはどうすればいいか。課題は多いが、非常に大きなゴールに向かって我々は進んでいるということはおわかりいただけたと思う。『人間』という、もっとも複雑なシステムをどうこうしようというわけだから、研究の学際化は当然だ。多くの研究機関や大学、企業と一緒に研究を行なっていきたい」とまとめた。
デジタルヒューマンは、単なるシミュレーションの枠内だけに留まるものではない。もし「人間のモデル」ができたとしたら、それは常に実時間で、システムのなかで動くものになるだろう。たとえば自動車にデジタルヒューマンシステムが搭載されれば、実時間で運転者の行動や心理を予測して、働きかけることが可能になる。将来のPC、ユビキタスデバイスにも必要とされる機能だろう。いわゆる人工知能とは違うが、人のことを理解し、予測するシステム。新しいコンピューティングの方向性が、生まれつつある。
そのほかの研究についてもオープンハウスで公開された。簡単に写真でご紹介する。
 |
 |
| かけごこちの良い眼鏡を開発するための人間の顔モデル。実際にスキャンされたもので、ツルなどがあたる部分は人間の皮膚に近い素材でできている | こちらは足をスキャンするための機械。靴底カーブのフィット感改善、むくみそのほかの改善を目指す |
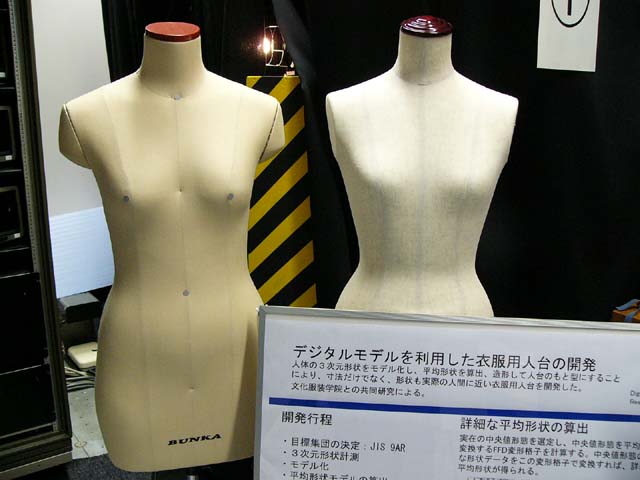 |
 |
| 実際の人間をスキャンして作った人台。より着心地の良い服をつくるためのもの | 6軸力覚センサー付きトレーニングシステム。バーチャル手術用。CGを見ながら、内視鏡の訓練をする |
□産業技術総合研究所 デジタルヒューマン研究センター
http://www.dh.aist.go.jp/
□関連記事
【2003年9月29日】【森山】人間に手を差し伸べる机、部屋、計算機
~東大COE 情報科学技術コア実世界情報システムプロジェクト・シンポジウム&オープンハウス
http://pc.watch.impress.co.jp/docs/2003/0929/kyokai15.htm
(2004年3月16日)
[Reported by 森山和道]
【PC Watchホームページ】
PC Watch編集部 pc-watch-info@impress.co.jp 個別にご回答することはいたしかねます。
Copyright (c) 2003 Impress Corporation All rights reserved.