 |
総勢93機が出場した2足歩行ロボット競技大会
|
 |
2月1日~2日開催
ホンダの「ASIMO」やらソニーの「SDR-4X」など人型ロボットを見て「必殺技はなんだろう」と妄想してしまいがちなお年頃の貴方の魂を、マグニチュード6.2で揺さぶる熱いロボット競技大会「ROBO-ONE」の第3回大会が、東京臨海副都心の日本科学技術未来館で開催された。これまで通り、無駄に熱い思いを込めてレポートしたい。
■ROBO-ONEは2足歩行ロボットの殴り合い大会だっ!
ROBO-ONEは、主に個人やサークルなどのロボット製作者が、そのロボット技術を競う競技大会。主催はROBO-ONE委員会で、年2回のペースで開催され、今回で第3回目となる。
出場するロボットの基本条件は「2足歩行であること」で、有線でなければOK。競技は第1日目にデモンストレーション審査による予選が行なわれ、予選成績上位16台のロボットが第2日目の格闘競技とデモンストレーションの総合で競われる決勝トーナメントに勝ち進む。
今回のデモンストレーション課題は、第2回大会から導入された「屈伸運動」に、横移動を組み合わせた「ボックスダンス」が加わっている。参加ロボットはこれらの課題をデモンストレーション中に行なうことで、高い審査得点を得られる仕組みだが、この他にも「自律動作性」などの技術面も審査の得点として換算される。
決勝トーナメントで行なわれる格闘競技は、相手のKOを奪うボクシング形式の3ラウンド制で、各ラウンドは2分で行なわれる。ノックダウンしても10カウント以内に立ち上がれば試合続行が可能だが、1ラウンド内に3回ノックダウンすると、そのラウンドは負けになるルールだ。ただし、決勝トーナメントは格闘による試合だけでなく、試合前のデモンストレーションによる審査得点も重要視されている。
そのほかにもいろいろと細かいルールがあるわけだが、そんな細かいことを説明しても面白くないので、ともかく筆者の印象に残ったロボットとその試合を紹介しよう。
■前回大会優勝者 vs 大会常連の名勝負
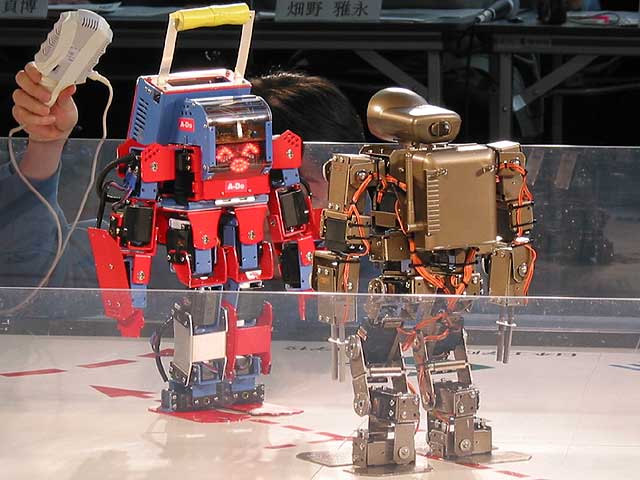 |
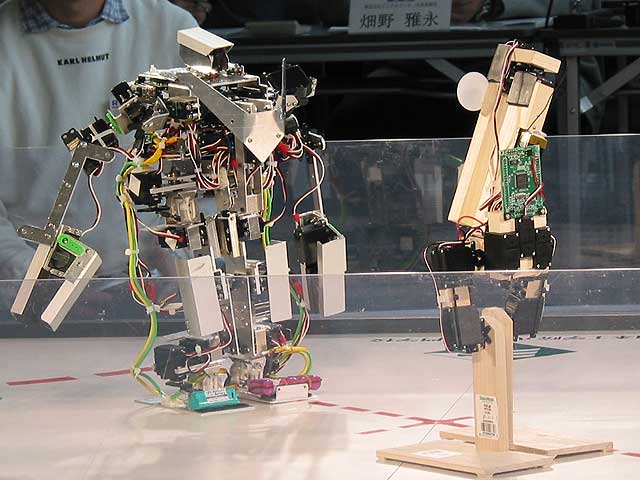
| A-Do(左)とMetallic Fighter(右) |
決勝トーナメント第1戦で行なわれた菅原雄介氏の「A-Do(アド)」と森永英一郎氏の「Metallic Fighter」の試合は、今大会でも屈指の名勝負だといえるだろう。森永氏は前回大会の優勝者で、第1回から参加している常連。出場ロボットのMetallic Fighterは、多彩なアクションが可能で完成度が高い。対する菅原氏は「マイクを持たせればROBO-ONE最強」と噂される第1回よりの常連マイクパフォーマー。しかしそのロボットは毎回決勝に進出しているという実力派だ。
両ロボットともに安定感が高く、また経験豊富な出場者同士の戦いとあって、なかなかお互いのダウンが奪えない、という展開となった。このクラスの出場ロボットの多くは、しゃがみこむことで安定性を高められるデザインだ。そのなかでもMetallic Fighterはより深くしゃがみこめて、しかもしゃがんだ状態での移動も可能となっている。実際に自分の足でやってもらえるとわかりやすいが、しゃがんだ状態で動くというのは、大きな力が必要な動作だ。このほかにもMetallic Fighterは自ら寝転んでから立ち上がったり、片足立ちの状態で上半身をひねるなど、ロボットに実装するのが困難な高度なアクションに対応している。
対するA-Doのファイティングポーズも、Metallic Fighterほど深くはしゃがみこまないものの、ちょっと殴られたくらいでは転ばない安定感を持っている。ちなみに菅原氏は第1回から「A-Do」という名称のロボットで出場しているが、そのデザインは毎回異なっている。前回までは「猪木のモノマネ」という必殺アクションを持つ小型ロボットだったが、今回は安定性と重量感にあふれる中型ロボットで出場している。
試合ではMetallic Fighterが機動力を活かして相手を果敢に攻撃する中、Metallic Fighterの細い爪が相手に引っ掛かり転倒する場面があった。Metallic Fighterはすぐさま立ち上がり試合は続行されるものの、A-Doは高い安定性でダウン数が少なく、最終的にはA-Doが審査員の判定によって勝利を収めた。
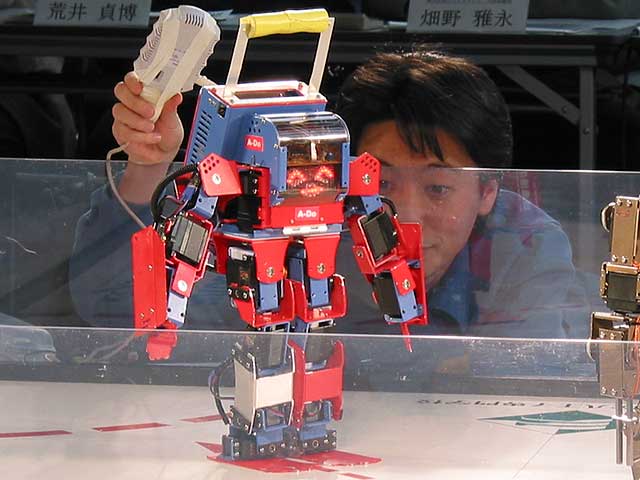 |
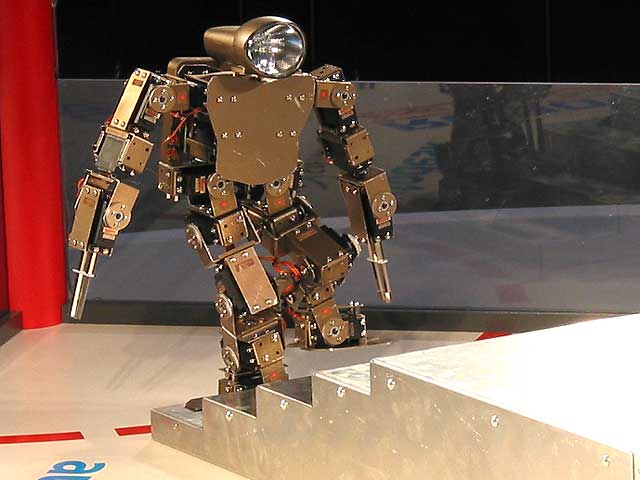 |
| A-Do。ちなみにその後ろで送信機を構えるのは製作者の菅原氏。A-Doの操縦は別の人がやっている | エキシビジョンの「ROBO-ONE Stairs」に挑戦するMetallic Fighter。完走直前で転倒し惜しくもリタイア |
 |
 |
 |
| 【動画】Metallic Fighterのデモンストレーション。多彩なアクションを披露する | 【動画】ROBO-ONE Stairsに挑戦するMetallic Fighter。足を最大限に伸ばしつつ上っている | 【動画】A-DoとMetallic Fighterの勝負。しゃがみながらも移動したり、倒れてもすぐさま立ち直るMetallic Fighterに注目 |
■予選常勝の「R-Blue4.1」
 |
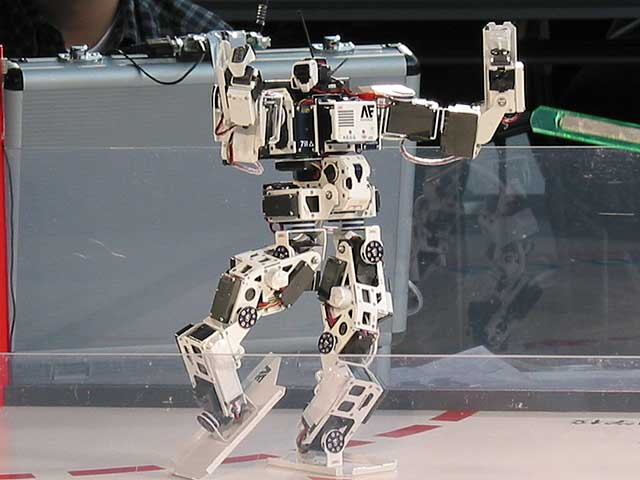
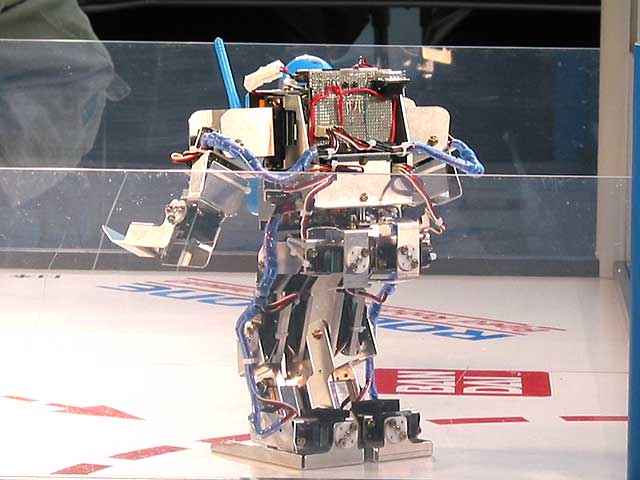
| 白いデザインのR-Blue4.1 |
吉村浩一氏による「R-Blue4.1」は、第1回大会から出場しているR-Blueシリーズの最新バージョンだ。R-Blueシリーズは毎回、ほぼ同じコンセプトのスマートな人型デザインで、安定した歩行や起き上がり動作など多彩なアクションに対応し、第1回大会の「R-BlueIII」、第2回大会の「R-BlueIV」ともにデモンストレーションの予選を1位で通過している。今大会のR-Blue4.1では三点倒立し、さらに足をひねるという大技も加わり、やはり予選を1位で通過した。
R-Blueシリーズは、決勝トーナメントにおいても第1回大会では第4位、第2回大会では第3位と好成績を残していて、今回も上位に勝ち進んだ。
R-Blue4.1は準決勝で、大会最大級サイズとなる滝沢一博氏の「Adamant 3rd」と対戦した。Adamantシリーズは最大級のロボットとして第1回から出場している。今大会のAdamant 3rdは、安定感のあふれる下半身と、オペレーターの動作に追従するいわゆる「マスタースレーブ」方式のコントロールに対応する上半身を持つロボットだ。
R-Blue4.1とAdamant 3rdでは二回りもサイズが違うが、ここでもR-Blue4.1は果敢に攻め込み、ダウンを奪われつつも、立ち上がってダウンを奪い返す。Adamant 3rdも起き上がる機能を持っているのだが、ダウン時に上半身のサーボを破損して棄権となった。
今回の大会では起き上がり機能を有するロボットが多いだけに、試合中に何度も転倒するロボットが多い。そのため、トーナメントを勝ち残ってもダメージが蓄積され、部品破損により棄権するロボットも多かった。とくにAdamant 3rdは重量級ロボットのため、転倒時のダメージは他のロボットの比ではなかったようだ。
この後、R-Blue4.1は決勝に進み、前出のA-Doと対戦するが、R-Blue4.1自身も第2ラウンドで足の故障によって棄権した。A-Doにもダメージ蓄積がなかったわけではないようだが、高い安定性でダウンをあまり奪われず、かつ決勝戦でもしっかりと動く信頼性の高さからA-Doの優勝が決まった。今後の大会では、ダメージコントロールがさらに重要な要素となるだろう。
 |
 |
 |
| クールなデザインのR-Blue4.1だが、コミカルな動きもする | 準決勝で巨大なAdamant 3rdに挑むR-Blue4.1 | 決勝でA-Doと戦うR-Blue4.1 |
 |
 |
| 【動画】デモンストレーションで三点倒立を披露するR-Blue4.1 | 【動画】第1戦で一回り大きい坂本隼人氏の「GVZ-R01」を倒すR-Blue4.1 |
■傷だらけで決戦に挑む「マジンガア」
 |
| マジンガーZそっくりなマジンガア |
こうじ氏の「マジンガア」は、漫画のマジンガーZを模したロボットだ。解説者をして「イロモノのロボットはたいていあまり動かないものですが、このマジンガアはなかなかの実力を持ってますね」と言わしめるほどのロボットで、安定した歩行などの各種動作のほかに、転倒から起き上がる機能も持っている。
またマジンガアは演出にも凝っている。オペレーターはコスプレをし、自前のスピーカーから動作音SEと掛け声が流れ、予選のデモンストレーションではアシュラ男爵風の悪役も登場した。さらにアルミホイルで急造したと思われる、目立つパラボラアンテナも使用していたが、このパラボラのおかげか、他のチームが会場の電波環境の悪さに四苦八苦している中、マジンガアはコントロール不全に陥ることもなく動作していた。
非常に細かい点だが、参加ロボットの多くはRS-232Cの信号を無線化するアイ・オー・データ機器製の「WNA-RS(x2)」を使っていて、マジンガアもパラボラアンテナの中央には同製品が張り付けている。この他にも無線LANを使うケースも多かったが、どちらにせよ低出力のパソコン用無線機器だと、反射波の期待できない大きな空間では辛いらしく、コントロール不全に陥るロボットも多かった。
マジンガアは安定した動作と掛け声とともに繰り出されるロケットパンチ(実際にはただのストレートパンチ)によって決勝トーナメントを勝ち進むが、準決勝で菅原氏のA-Doに負け、3位決定戦で滝沢氏のAdamant 3rdと対戦することになる。Adamant 3rdも準決勝で故障した上半身のサーボを急遽修理した手負い状態だが、マジンガアも準決勝では肩のサーボのトルクが足りずに起き上がれなくなるなどの手負い状態。Adamant 3rdは控え室で他の出場者の協力で修理を行ない、マジンガアは準決勝終了後からリングサイドでひたすら調整を続けるというギリギリの展開となり、3位決定戦は戦闘ダメージによる故障に泣いたロボットが多い今大会を象徴する試合となった。
試合は白熱したものとなり、1ラウンド目はマジンガアがAdamant 3rdのダメージ蓄積からTKO勝ちし、2ラウンド目は引き分け、3ラウンド目はマジンガアがダウンを奪われ、起き上がりを試みるも、リングフェンスに手を引っ掛けてカウント内に起き上がれずにKOとなった。試合の結果は審査員の判定でAdamant 3rdが僅差で勝利した。
 |
 |
 |
| 一見、マジンガーZで遊ぶ大きなお友達にも見えるが、ホントはマジンガア整備中の風景 | 準決勝でA-Doのタックルを喰らうマジンガア | 3位決定戦ではAdamant 3rdと熾烈な戦いを繰り広げる。ブレストファイアーの部分が吹き飛んでいる |
 |
 |
| 【動画】凝った演出のデモンストレーションを行なうマジンガア | 【動画】Adamant 3rdにいったんは倒されつつも、不屈の闘志で立ち上がるマジンガア |
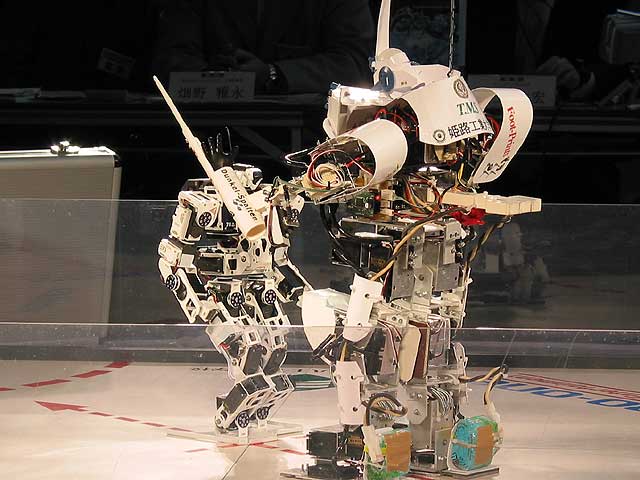
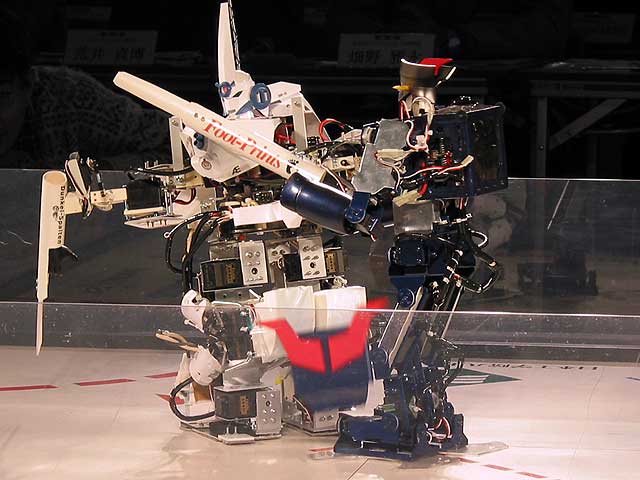
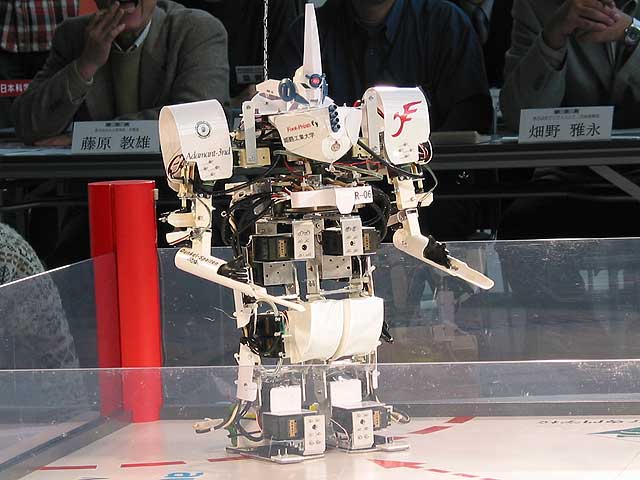
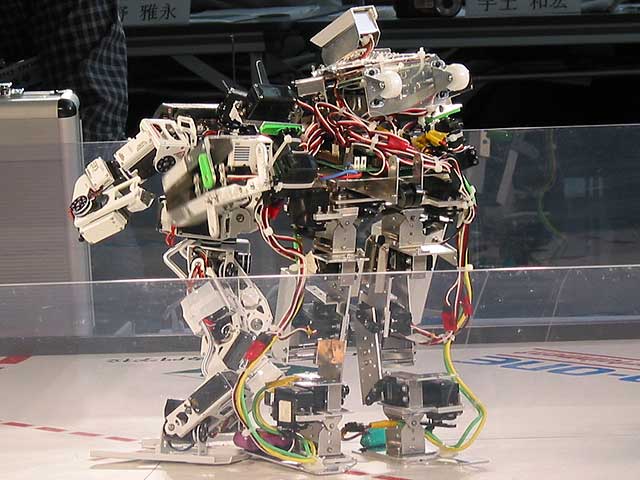
■マスタースレーブ搭載の「Adamant 3rd」と「剛王丸II」
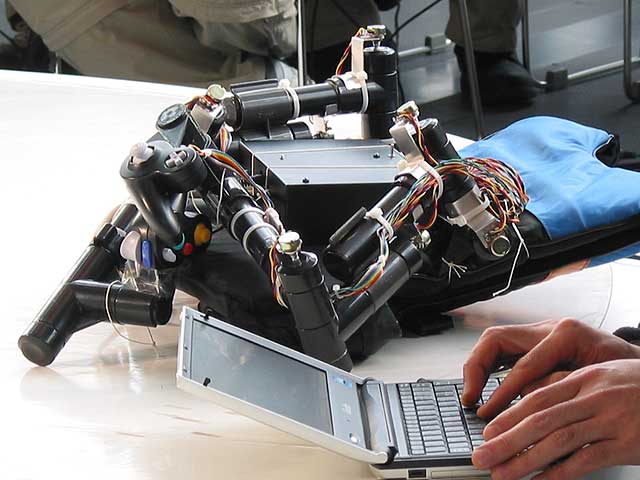
滝沢一博氏の「Adamant 3rd」と、津藤智氏の「剛王丸II」は、ともにオペレーターの腕の動きに追従する、いわゆるマスタースレーブシステムを搭載している。そのため、オペレーターは2本の腕のような多関節ジョイスティックを握り、あたかも自分が殴り合いをしているかのようにそれを振り回して戦いを進めている。
ROBO-ONEに出場するロボットの操縦形式にはいくつかがあるが、決勝進んだロボットの多くが、PCのインターフェイスをそのまま使うタイプと、ラジコンのプロポやゲームのコントローラを使うタイプの2つに分類される。
PCのインターフェイスをそのまま使う場合「マウスで命令ボタンをクリック」のような形式となる。これはリアルタイム操作では不利な面があり、またオペレーターは座った姿勢でないといけなくなる。
一方、プロポなどのコントローラーを使う場合は「ある特定のコマンド操作がされると、ロボットがある特定のアクションを行なう」という形式になる。この場合、コマンド操作とアクションの関連付けによっては、間違ったコマンドを入力したり、あるいはコマンド設定外の細かい動作が指定できないなどのデメリットがある。
マスタースレーブシステムの場合、自分の腕の動きにロボットの腕の動きが追従するため、感覚的に柔軟かつ高速な操作ができる。下半身の動作をコントローラーのグリップに仕込めば、一人で立ったまま操作が可能だ。
3位に入賞したAdamant 3rdの場合、両腕をマスタースレーブシステムでコントロール可能で、さらに上半身の動きに合わせて下半身が自動でバランスをとる機構も併せ持つため、安定した状態で両腕を振り回すことが可能だ。R-Blue4.1との準決勝では故障に泣いたAdamant 3rdだが、安定感、重量感に加え高速かつ柔軟な攻撃が可能で、今大会屈指の傑作機だ。
準決勝ではR-Blue4.1相手に、腰部の故障で敗北を喫したものの、3位決勝戦で不死鳥のごとくよみがえり、強敵マジンガアに勝利したことは、Adamant 3rdの戦闘能力の高さを物語っているといえるだろう。
剛王丸IIの場合、コントローラのグリップに握りつつボタン操作するのに適したゲーム機のコントローラーを流用することで、操作性を向上させている。
マスタースレーブシステムは高い歩行安定性がないと使えないシステムだが、決勝の試合では柔軟な操作が必要な場合が多く、今後のROBO-ONEでも広まる可能性が高いだろう。
 |
 |
 |
| Adamant 3rd。大きく、デザインにもこだわりが感じられる | Adanabt 3rdのコントローラーを装着するオペレータの滝沢氏 | 【動画】Adamant 3rdと滝沢氏の動きが同調しているところがポイント |
 |
 |
 |
| 剛王丸II。サイズはちょっと小さめ | 剛王丸IIのコントローラを装着する津藤氏 | 剛王丸IIのコントローラ。ゲームキューブのコントローラらしきものが流用されている |
■小学生でも作れる?!「Weird-7」
 |
| Weird-7 |
サンフランシスコから参加したかづひ氏の「Weird-7」は、総制作費2万円程度と、非常に安価に作られたロボットだ。構造は大きな頭を左右に振ることで重心移動をし歩くといういたってシンプルなもの。
ROBO-ONEに参加する人型ロボットは、1個で1万円以上するラジコン用サーボを片足で6個程度使うものが多いが、Weird-7では11ドルのサーボを全部で9個しか使っていない。2日で製作できたといい、かづひ氏自身が作った2台と、図面を見せて知人に作らせたという1台のあわせて3台の同型機を会場に持参していた。制御に市販のマイコンボードを使っているものの、構造材は木材で「小学6年生でも作れる2足歩行ロボット」をコンセプトにしているという。
こんなお手軽なWeird-7だが、横歩きや屈伸など大会のレギュレーションを満たす性能を持っていて、さらに転倒時には起き上がれるばかりか、前転もできるという多彩なアクション性から、並み居る「数十万円級ロボット」と並んで決勝トーナメントに進出した。
トーナメント1回戦では中村素弘氏の「HSWR-02」と対戦する。しかしHSWR-02は全金属製の中量級で、木製のWeird-7の攻撃ではびくともせず、善戦むなしくWeird-7は敗退してしまった。しかし、1回はHSWR-02のミスからダウンを奪うなど、高価なロボットが多い中、記録に残る試合を行なえたといえるだろう。
ちなみにWeird-7の作り方は近日中にかづひ氏のホームページ(http://kaduhi.com/weird-7/)で公開される予定とのことだ。
 |
 |
| 同型機3機をカバンに収納。動くように調整されているのは真ん中の1体のみとか | HSWR-02と対決するWeird-7 |
 |
 |
 |
| 【動画】デモンストレーションで前転を披露するWeird-7 | 【動画】必死に攻撃するも、見事カウンターを喰らうWeird-7 | 【動画】ダブルノックダウンするも、同時に立ち上がるHSWR-02とWeird-7 |
■小さい小さい「SILFH2」
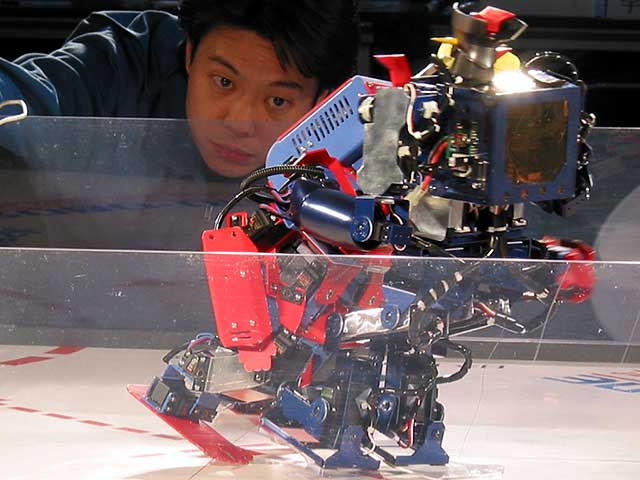
井藤功久氏の「SILFH2」は、今大会最小のロボット。前回大会でも松本大輔氏が「Limbgrand」という同クラスのロボットで出場しているが、Limbgrandが市販の小型サーボを使っていたのに対して、SILFH2はオリジナルのサーボシステムや減速器を搭載しているという。
そのフォルムはホンダの人型ロボット「P3」にそっくりだが、特筆すべきはともかくその大きさ。比較対照がないのでわかりにくいかもしれないが、大会に出場する大型ロボットの腰くらいの高さしかないリングフェンスよりもさらに小さいサイズだ。
この小ささながらSILFH2は歩行、小ジャンプなど一通りのアクションをこなすことができる。動作も安定していて素早く、予選を5位で通過した。しかし、SILFH2、残念ながら決勝トーナメントは棄権している。確かにこの大きさでは、決勝トーナメントで他のロボットに勝ち目はないばかりか、せっかくのロボットが破損してしまう恐れもあるので、無理しないことは無難な判断といえるかもしれない。
 |
 |
| 出場ロボット中最小の「SILFH2」 | 【動画】小さいながらも多彩なアクションをデモンストレーションで披露 |
■大きな手が特徴「HSWR-02」
 |
| HSWR-02 |
中村素弘氏の「HSWR-02」は、今回から新たに加わったエキシビジョン、ドアを開けて通るという「ROBO-ONE Door」を意識した大きなハンドを搭載するロボットだ。ちなみに中村氏は前回大会では最大級の身長を持つ「HSWR-01」で出場しているが、今回のHSWR-02はROBO-ONEでは一般的なサイズだ。
HSWR-01にはビーチボールを認識し、抱え込んで投げるという機能があったが、HSWR-02にもスポンジボールを片手で掴んで投げる機能がある。予選2回戦の吉村氏のR-Blue4.1との対戦では、試合前のデモンストレーションでボールを投げるアクションを披露するが、R-Blue4.1はアドリブでそれを蹴り返し、ともに戦闘機能以外の汎用性をアピールしていた。
決勝トーナメントに進出したHSWR-02はこのR-Blue4.1との対戦でサーボを破損し棄権している。このHSRW-02も、戦闘ダメージによる故障に泣いた1台と言えるだろう。
ちなみにHSWR-02にはオリジナルテーマソングが存在し、デモンストレーションでは会場に「ろぼわんちょーっぷ!」という威勢のいい掛け声が響き渡っていた。
 |
 |
 |
| ROBO-ONE Doorに挑戦するHSWR-02 | 第2回戦でR-Blue4.1と対戦するHSWR-02 | 【動画】第1回戦でWeird-7にボールを投げつけるHSWR-02 |
■成長を続けるROBO-ONE
 |
| 参加ロボット集合写真 |
第3回となる今回のROBO-ONEでは、第1回の38台、第2回の72台をさらに上回る93台のロボットがエントリーし、そのうち60台以上がデモンストレーションを行なった。ロボットのレベルも上がっていて、安定歩行は当たり前、新たに規定に加わったボックスダンスはもちろん、三点倒立や前転、マスタースレーブシステムなど新しい技術を取り入れた意欲的なロボットが好成績を収める結果となった。
こうしたハイレベルなロボットが増えた結果、決勝トーナメントでは試合の熾烈さも増している。第2回では転倒から起き上がれることが勝負を決めるケースが多かったが、そうしたロボットが増えた第3回では、転倒時のダメージを減らし、次の戦いにつなげられることが重要だったようだ。決勝トーナメントは試合数が進むにつれてロボットの故障が目立っていた。今後のROBO-ONEでは、転倒時のダメージを減らすことや、転倒自体を避けることが開発と戦術の大きなテーマになるだろう。
大会のレベルが上がると、ノウハウを蓄積した常連の参加者が有利にはなるが、それでも新規参加者にチャンスがないわけではない。決勝トーナメントに進んだロボットの多くが、出場経験者ではあるものの、初参加ロボットも決勝トーナメントに残っている。常連参加者によるパワーアップしたロボットも面白いが、新規参加者による斬新なロボットも十分に期待できるだろう。
なお、今後のROBO-ONEの予定としては、まず韓国と中国でアジア大会を予定しているという。国内開催の次回大会は8月の予定だ。海外にも進出するROBO-ONEの将来が楽しみだ。
□ROBO-ONEのホームページ
http://www.robo-one.com/
□ロボット関連記事リンク集
http://pc.watch.impress.co.jp/docs/2002/link/robo02_i.htm
□関連記事
【2002年8月12日】2足歩行ロボットの競技大会「ROBO-ONE」第2回開催
~人型ロボットが殴りあう!
http://pc.watch.impress.co.jp/docs/2002/0812/roboone.htm
【2002年2月4日】世界初の2足歩行ロボット競技大会「ROBO-ONE」開催
~エキシビジョンには「先行者」の開発者も登場!
http://pc.watch.impress.co.jp/docs/2002/0204/robo.htm
(2003年2月3日)
[Reported by 白根 雅彦]
【PC Watchホームページ】
PC Watch編集部 pc-watch-info@impress.co.jp 個別にご回答することはいたしかねます。
Copyright (c) 2003 Impress Corporation All rights reserved.