 |


■森山和道の「ヒトと機械の境界面」■車の知能化に見るマンマシンインターフェイスの未来
|
 |
9月2日、ホンダは国土交通省が推進するASV-3プロジェクトで開発した先進安全研究車「Honda ASV-3」を完成したと発表し、記者発表会を開催した。
「ASV」とはAdvanced Safety Vehicle、先進安全自動車の略称。ITS(Intelligent Transport Systems:高度道路交通システム)の一環として自動車安全技術の研究・開発の推進を目指した、国土交通省自動車交通局のプロジェクトである。
第1期ASVプロジェクトは'90年~'95年度、第2期は'96年~'00年度に実施された。第1期計画では乗用車が対象で、19台のASV車両が製作された。第2期計画では、対象をトラック、バス、二輪車にも拡大し、自律支援型ASV車両35台が製作されると同時に、道路インフラとの連携実証実験などが行なわれた。
今回発表された「Honda ASV-3」は、'01年4月~'06年3月の5カ年プロジェクトとして推進している「ASV-3プロジェクト」の一環として開発されたものだ。
自動車はおよそ2万点~3万点の部品で作られており、その3割は電気・電子部品だと言われ、今後、さらに高度化が進むと思われる。今回は、自動車を中心とし、情報通信技術、知能化技術、ロボティクスなど各種技術の統合されたこの車を通し、将来の人と機械の関係を考えてみたい。
●Honda ASV-3
まずは「Honda ASV-3」について。一見普通の車に見える「Honda ASV-3」は車両相互情報通信、いわゆる車車間通信技術を実装している。車同士が相互に位置や速度など自分の状態を通信することで、出会い頭の衝突を防ぐ。
緊急時には、仮にそこが携帯電話の電波が届かない場所でも、マルチホップでバケツリレーのように通信することで緊急救命通報することを可能にする。現在の技術で、同時に120台の車両と通信することができるという。通信帯域は現状は5.8GHz帯を使用する。実用化は3年後の予定だ。
そのほかレーダーやカメラなどの外部センサー技術、ECUによる統合判断技術、そしてシステムによるドライバーアシスト技術を備え、ドライバーの危険回避を手助けする。緊急時には自動でステアリング補助を行ない、車体の安定をはかる。
もちろん、'00年に発表された「ASV-2」で開発され、既に「インスパイア」や「レジェンド」などの市販車に搭載されている車線キープ技術や、CMS(追突軽減ブレーキ)、シートベルトを自動引き込みするE-プリテンショナーなども装備されている。
ASVに搭載されているカメラは単に画像を撮影するだけではなく、認識機能を持ち、道路標識や道路面のペイントを認識できる。それにより、交差点などを認識して、ドライバーが減速しない場合は注意・警告を与える。もちろん車車間通信により、お互いの出会い頭の事故も出来るだけ回避する。
交通事故の7割が認知遅れによるものだと言われている。つまり気づくのが早ければ事故を回避できるというわけだ。そこを支援するのがASVである。
また、ASV-3はシートの中に圧力変化を計測する生体センサーを内蔵。そのデータから呼吸と脈拍を計測することができ、事故時にその情報をリアルタイムでセンターで監視しながら適切な情報を通報するといったことも可能になっている。また事故発生時には前後15秒のレコードを自動記録する。もちろん、車両の加速度変化や車内温度などのデータをモニタすることもできる。
自動運転ではなく、あくまで「補助」、「アシスト」だが、事故の危険性があるときにはドライバーに注意を喚起し、それでもぶつかりそうになったときには可能な限り事故のダメージを軽減する。事故が起こったあともできるかぎりケアを行なう。現時点で可能な限り安全性を追求した車だ。
 |
 |
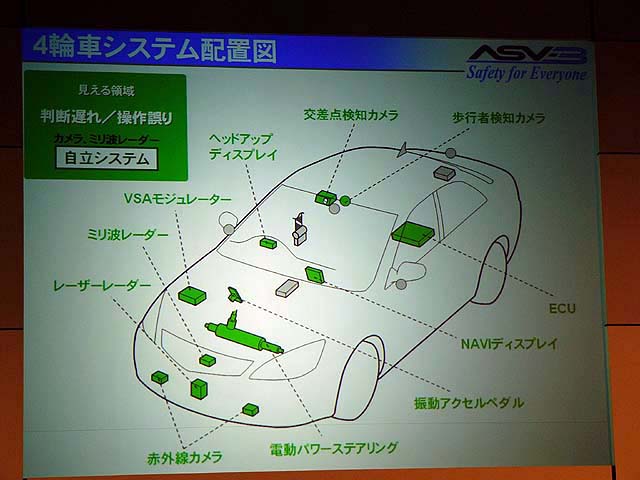 |
| ASV-3正面 | ピョンと突き出ているのは車車間通信用のアンテナ | 4輪車システム。ミリ波レーダー、レーザーレーダー、赤外線カメラ、歩行者・交差点検知カメラなどを持つ |
 |
 |
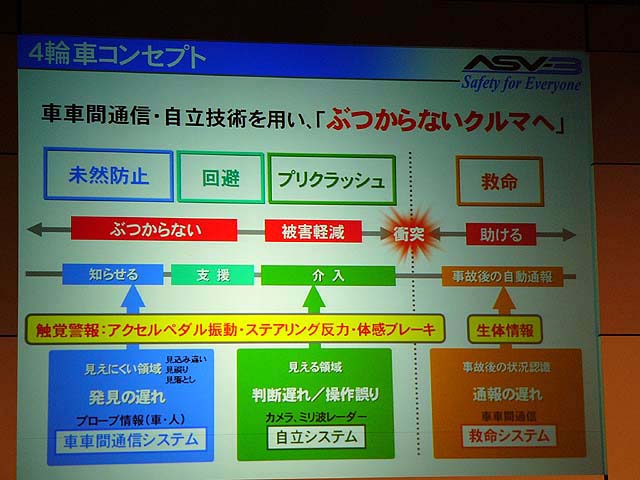 |
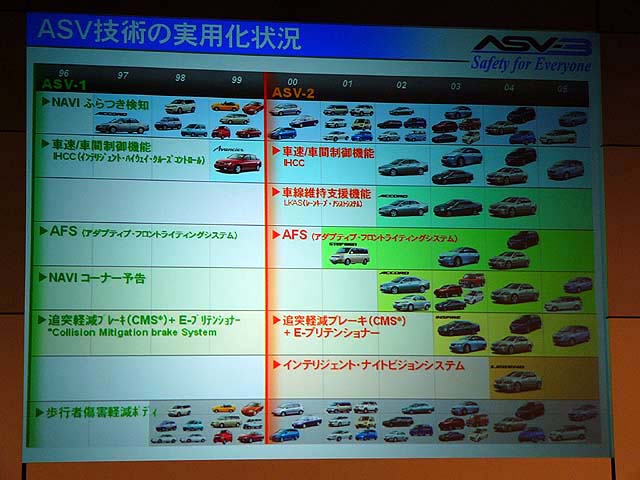
| ホンダ安全技術ロードマップ。「ぶつからない車」を目指す | ASV技術の実用化状況。これまで車間制御や追突軽減ブレーキ、インテリジェントナイトビジョンなどが実用化されてきた。ASV発表後数年で実際の市販車に搭載されるペース | 4輪車コンセプト。車車間通信・自立技術を使い、ぶつからない車を目指す |
 |
 |
 |
| 障害物回避支援技術。制御なしだと大きくレーンをはみ出してしまうが、制御を加えることで対向車との衝突などの二次的事故を防ぐ | 衝突を予測し回避し、事故時には自動通報するイメージ | ASV-3に搭載されている車車間通信機。5.8GHz帯を使う |
 |
 |
 |
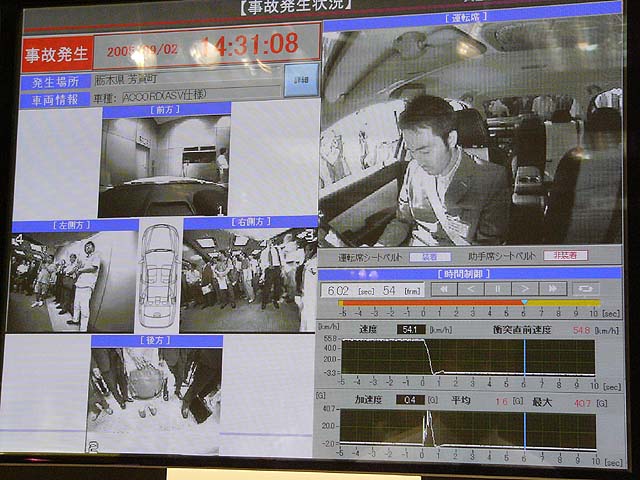
| 緊急通報時のモニター画面。センター側はこのような画面を見ながら車内の状況や事故の状況を判断。通報・ドライバーに適切なアドバイスを与える | 事故時の車内のイメージ。モニタにはセンター側オペレータが顔を出し、フェイストゥフェイスでアドバイスする。車内の状況を伝えるカメラは、バックミラー部分から撮影されている。近赤外光を使っているので夜間でもドライバーの表情が見える | |
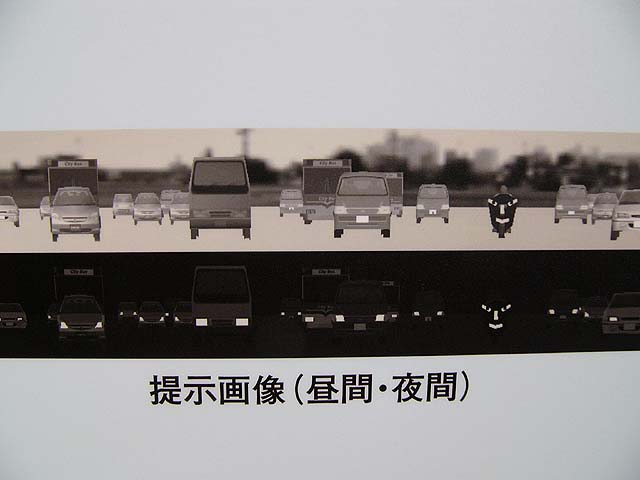
また同時に発表された2輪のバイクには、人間の顔を連想させ被視認性を向上させる「FACE(Facial Attention Conspicuity Enhancement)」というデザインコンセプトを採用。バイクは4輪よりも小さく、見落とされやすい。いっぽう人間の脳は、顔に対して素早く反応する性質を持っている。そこでバイクの姿を顔に似せたデザインとすることで視認性を高めた。その効果は脳活動を計測することで実証済みだという。
バイクにも後方カメラなどを設置。統合したセンサー情報を元にドライバーに警告を与える。音声に関しては、Bluetooth搭載ヘルメットを介して伝える。
 |
 |
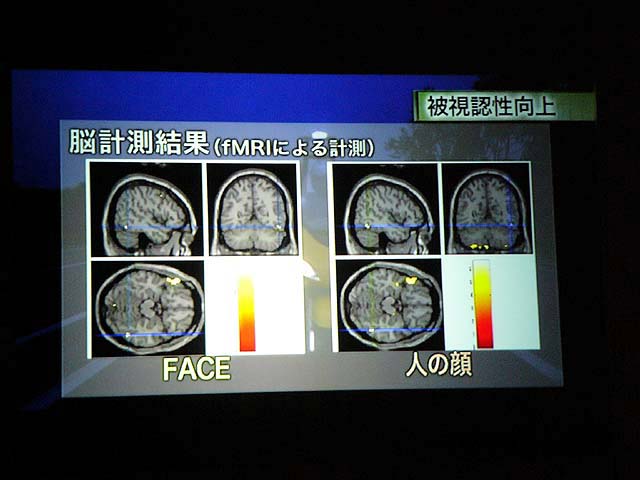 |
| 顔を思わせるFACEデザイン。目がつり上がっているのは、ナナメの線のほうが認識速度が上がるため | 他の車両との比較。たしかにFACEデザインのほうが、パッと見た瞬間に目立つ | 脳活動計測の結果を見ると、顔を見たときと同じ部位が賦活していることが分かる |
 |
 |
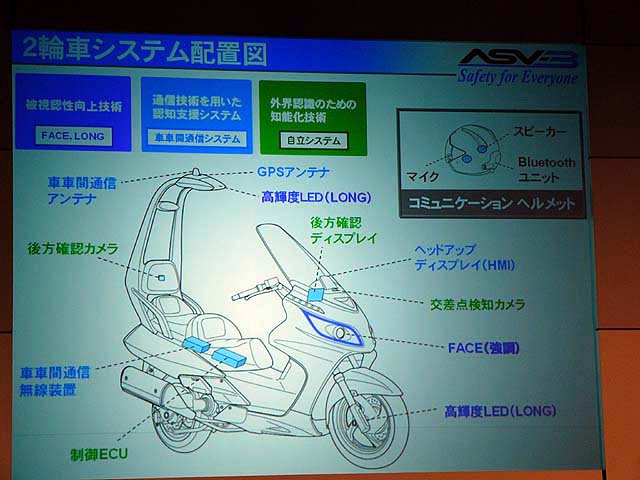 |
| Bluetooth搭載ヘルメット | コンソール。画面上に映っているのは後方カメラの画像 | 2輪車システム。バイクにも車車間通信機能技術を装備している |
現在の車の安全に対する考え方はだいぶ進歩していて、衝突を未然に防ぐことを主とする一次安全(アクティブセーフティ)、衝突時の傷害軽減を主とする二次安全(パッシブセーフティ)、そして衝突を予測しその被害を軽減するプリクラッシュセーフティの3つをベースに進められている。
既に述べたように、これまでもASVの技術のミリ波レーダーを活用した追突軽減ブレーキ(CMS)と、シートベルトの自動引き込みによってドライバーへの警告や事故時のダメージを軽減する「E-プリテンショナー」などが既に商用になっている。
CMSは不注意や操作遅れをカバーするシステムだ。自車の走行状態を把握するためのヨーレートセンサーや車軸センサー等の各種センサー類、前走車との距離や相対速度を測るミリ波レーダー、衝突判断を行なう制御ECU、ブレーキユニット、Eプリテンショナー制御ユニットなどから構成されている。
追突事故の多くは前走車のブレーキングに気づくのに遅れたり、操作が遅れることで発生している。それを防ぐために、システムは前方100mにわたって検知を行ない、相対速度や自車速度から衝突危険性を判断し、ユーザーに警告を与えたり、いよいよぶつかるとなったらブレーキをかける。
「HiDS(ホンダ・インテリジェント・ドライバーサポート・システム)」は、高速道路運転支援システムである。ステアリングに付けられたHiDSスイッチを入れると、フロントガラスに取り付けられたC-MOSカメラで道路の左右の車線を認識開始し、車は自動的に自分の状態量とドライバーからの操作の力加減に応じて、必要なだけステアリングトルクを加えて、車線をキープする。
高速道路で車の流れに乗るための巡航システムもあり、こちらは前の車両をミリ波レーダーユニットで観測して、車間距離を維持しながら走行する。先行車がない場合はセットした速度で定速制御する。前方にセットした車速よりも遅い車を検知した場合は、車間距離を保ちながら走行する。先行車がいなくなると、緩やかに加速して、セットされた速度で走行することができる。
一見、話だけ聞くと自動運転を目指しているかのように思われるかもしれない。だがホンダが目指しているのは、人間中心の考え方だという。それぞれの技術はあくまでアシストでしかなく、人間が操作しないと逆にアシストをやめてしまうように設計されている。
車は、人間のドライバーと機会の共同作業で運行されるシステムである。そこに機械による制御をどれだけ入れ込むかは難しい問題だ。なぜ難しいかというと、技術的な問題ももちろんあるが、一番の問題は、人間の気持ちが機械には分からないからである。
周囲の状況は、センシングやユビキタス通信技術により、だんだんと、車にも「見える」ようになりつつある。だが、乗っている人間がどのような制御を機械に加えようとしているのか、それについては車は自分に加えられる制御量から判断するしかない。
車間距離が近づきつつあったとしよう。しかしブレーキングが遅れているのではなく、単に人間はステアリングで追い越そうとしているのかもしれない。だが本当は人間が本当にボーっとしているのかもしれない。それだったら事故になってしまう。その判断は機械には下せない。だから今後も、いくら車が賢くなっても、車は自動運転ではなくあくまで人間が運転するものであり、機械がサポートするものに留まるだろう。
いっぽうで、ABS(Antilock Brake System)に代表されるように、人間の意図は汲むが操作に忠実には従わない、といった操作技術も必要になっている。ABSは急ブレーキを踏んでもロックがかからないように、自動的に断続的にポンプ圧をゆるめることでポンピング・ブレーキを行なうシステムだが、ドライバーは、ブレーキを踏み込むだけだ。人間の指示のとおりの操作を行なうと車両が制御不能状態に陥ってしまう可能性があると車が判断した場合は、機械が、ある意味で人間の操作を拒否しているとも言える。だがそのおかげで事故を防げるのだ。機械が人間を凌駕すればするほど、このような高度な制御が必要になってくる。同様の問題は、今後、ロボットなどでも発生してくると思う。
また、9月6日にトヨタは、運転者の顔の向きを検知する技術を使ったプリクラッシュセーフティ技術を開発し、2006年春に国内で発売予定のレクサスブランドの新型車に搭載すると発表した。ドライバーがよそ見をするとプリクラッシュシステムが警告を与える。このように、ドライバーそのものを監視する技術の導入も検討されている。
今後、これらの技術もテレマティクス(車載型双方向情報通信システム)に統合されていき、新しいサービスを生むのだろう。何が本当の意味でのキーテクノロジーになるのかはまだ分からない。
なお、本誌読者が最も興味があるだろう車車間通信に関しては、今後規格を統一し、国内自動車・二輪メーカー14社の間で相互にやりとりできるようにする方向だ。今年10月には公開実証実験を行なう予定である。ただ、今回のデモで見せたように画像データそのほかを実際にやりとりできるようになるのは、4Gケータイが普及したあとになるのではないかという(ホンダ説明員)。
また、5.8GHz帯となると直進性も高い。いくら道路上で使うことが前提とはいえ、出会い頭の事故で重要になってくる曲がり角やビル影との通信はどうするのかといった懸念もある。その場合は、曲がり角にある道路標識で中継するといったことも必要になるかもしれない。ただ帯域をどうするかという問題は、いわば国策であり、技術的課題だけでどうこう言える問題でもないようだ。
□Hondaのホームページ
http://www.honda.co.jp/
□ニュースリリース
http://www.honda.co.jp/news/2005/4050902.html
(2005年9月22日)
[Reported by 森山和道]
【PC Watchホームページ】
PC Watch編集部 pc-watch-info@impress.co.jp ご質問に対して、個別にご回答はいたしません
Copyright (c) 2005 Impress Corporation, an Impress Group company. All rights reserved.