 |


■森山和道の「ヒトと機械の境界面」■未来の車は多足多輪?
|
 |
放射状に配置された八本脚のホイール。1本1本が独自に動くことで段差のある場所や登坂時でも床をフラットに保ったまま移動することができる。また、その場で回転したり、車体の向きを変えずに自由な方向へ移動できる。必要に応じてそれぞれのホイールは持ち上げられ、急速な方向転換も可能。逆にホイールによって床の傾きを制御することもできる……そんな、ロボット技術を活用した試作車が2003年11月25日、発表された。
●まるでスケボーに乗った王蟲-8本の足で自由自在な機動性
 |
| リーディング・エッジ・デザイン代表・山中俊治氏(左)とfuRo所長・古田貴之氏(右) |
プロジェクト名は「ハルキゲニア・プロジェクト」。新たなクルマへの進化の可能性のひとつとなることを願って付けけられたコンセプト名だ。原宿にある株式会社クリエイティブボックス(代表・澁江建男)のプレゼンテーションルームにて、リーディング・エッジ・デザイン(L.E.D.、代表 山中俊治氏)、fuRo(Future Robotics Technology Center:千葉工業大学 未来ロボット技術研究センター、所長 古田貴之氏)によって、この新しいクルマを作るための三者共同研究プロジェクトの記者発表会が開かれた。
クリエイティブボックスは日産自動車100%出資のデザイン開発会社。第35回東京モーターショーで披露された「Nalis」や第37回の「JIKOO」など、実験的コンセプトカーの開発や生産車のデザインを行なっている。
fuRoの所長・古田貴之氏は2足歩行ロボット「morph3」で知られるロボット研究者。リーディング・エッジ・デザインは、morph3のデザイン他、工業デザイナーの山中俊治氏が率いるデザイン設計集団である。親指だけで入力する「tagtype」や、JR東日本の「SUICA」も同社の仕事だ。実験試作車の設計製作はプロトタイプメーカーの株式会社日南が行なった。
発表されたのは「Hallucigenia 01」(ハルキゲニア ゼロワン)という名前の1/5スケール実験試作車である。8本の脚(ホイールモジュール)を持つ。全長537mm、全幅331mm。1つの脚に4つ(走行用1、脚の位置や方向の制御用3)、合計32個のモーターを搭載している。それぞれの脚は上下左右、旋回など自由に動く。
 |
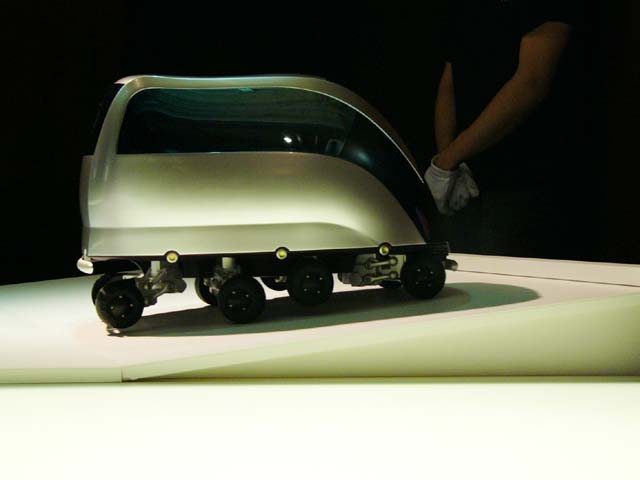 |
| 「Hallucigenia 01」。車輪が真横に動くことで、そのまま横にスライドする | 複数の車輪を使うことで、坂道でも床を水平に保てる |
 |
 |
| 戦車のように車体を自在に傾けることも可能 | スラローム走行。ホバークラフトのように車体の方向を変えずにS字走行する |
見た目は8輪のクルマだが、むしろ「32個のモーターを持った多関節ロボット」と見なしたほうが、このクルマのコンセプトには合致している。なぜなら、このクルマの脚は、1つ1つがサブCPU(サテライトコンピュータ)によってコントロールされる独立したロボットアームであり、それが協調して床を支えている、というコンセプト、構造になっているからだ。
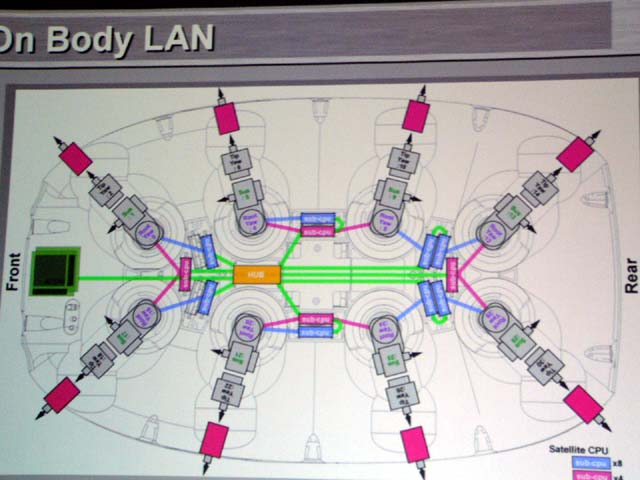
メインCPUとサテライトコンピュータとは体内LANによって結合され、分散協調制御システムを構成している。
 |
 |
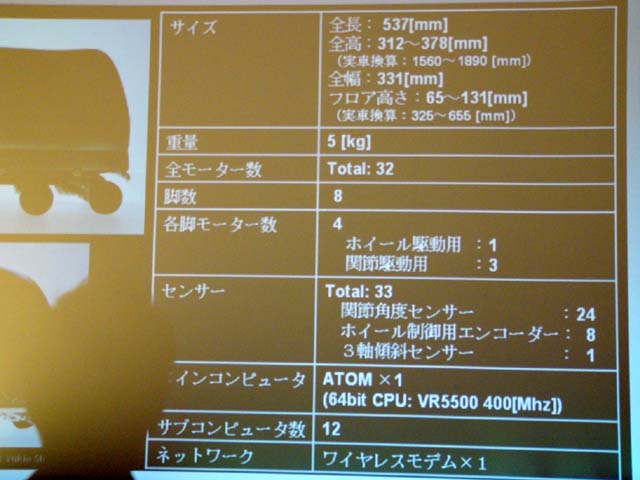 |
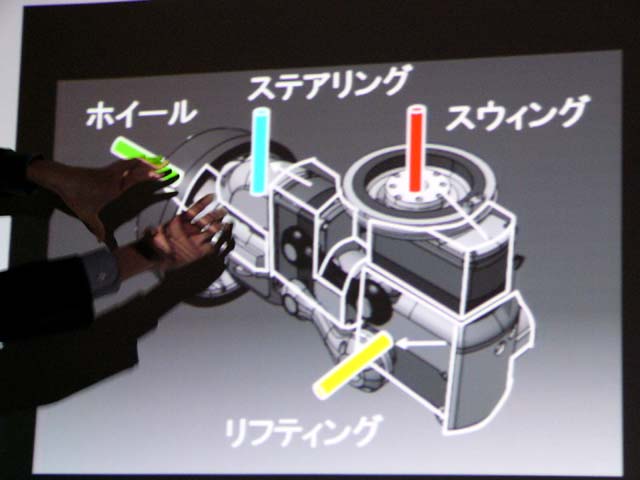
| ホイールの構成。実は放射状の状態がニュートラル | ホイール・モジュールの構成 | Hallucigenia 01の性能諸元 |
 |
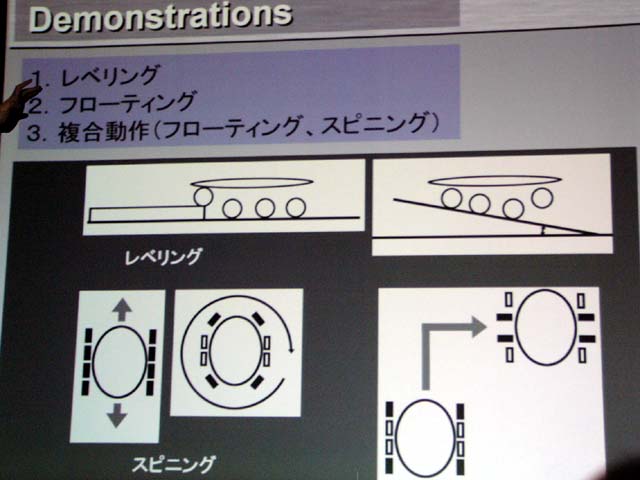 |
| 体内LAN構成図。メインCPUはmorph3と同じく、NECのVR5500(400Mhz)をベースに開発した「ATOM」 | 段差に対応するレベリング、車体の向きを変えずに移動するフローティング、その場旋回のスピニングなどの動作ができる |
なお、車体の駆動系やバッテリ、制御系などは全て床下に装備されている。そのため、汎用性のあるフラットなフロアが実現されている。今回の外装はあくまで一例だという。
●従来の車とは一線を画すコンセプト
会見ではハルキゲニア・プロジェクトの経緯も発表された。morph3のデザインを行なっていた山中氏とクリエイティブボックスとは2002年春から次世代乗用車研究を始めていた。そのなかで山中氏は、これまでのクルマのコンセプトをゼロから問い直すことから作業を始めたのだという。
既存のクルマでは、単体のパワーユニットからそれぞれの車輪にパワーを振り分けるというコンセプトで成り立っていた。そのため、まずパワーユニットをどこに配置するかが設計の要となる。だが2足歩行ロボット「morph3」の作業をfuRoの古田氏らと進めるうちに、多数のモーターが協調して一つの動きを作るロボットと、単体のパワーユニットを中心とするクルマとでは、「エンジニアリング上の成り立ち」が大きく違うことに思い当たったのだという。
そこから「床下にたくさんのロボットを並べて、それが協調して床を支えて移動する」というコンセプトが生まれた。脚の形はしているが、ホイールモジュール1つ1つがロボットで、分散協調して動く、というのはそういう意味だ。電気自動車やホイールインモーターのクルマは存在するが、それらは基本的にはエンジンをモーターに置き換えたに過ぎないという。
分散しているものを統合制御するというコンセプトでは、容易に拡張が可能だ。フロアに載っているものがもっと重たくなるようであれば、さらに多数のモジュールを下に組み合わさればいい。そこが、1つのエンジンのパワーを生かすために車輪の数をできるだけ少なく設計する、既存のクルマとの違いである。
 |
 |
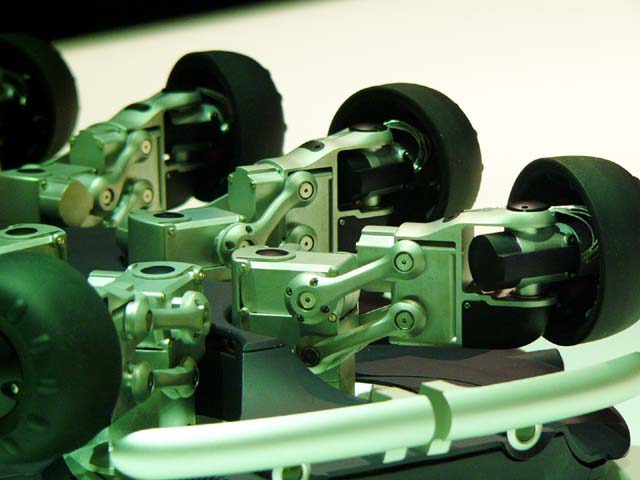 |
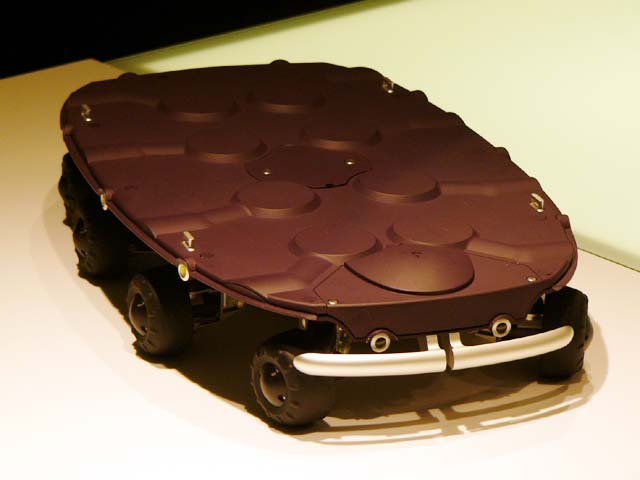
| 外装なしのハルキゲニア。まるでスケートボードだが、人間の体重は支えられない | ハルキゲニアの裏面。裏返すとまるで多足の虫のようだが、見た目が似たのはあくまで結果とのこと。底面には電源スイッチもある | 脚部アップ |
むしろハルキゲニアでは、冗長な車輪を持つことの重要性を発見したという。たとえば坂を登坂するときは、実は先端の車輪部分が少しだけ持ち上げられていて、タッチセンサーの役割も果たすようになっている。また多数の車輪があるので、一つ二つの車輪が壊れても問題なく走ることができる。将来的には、急発進や急ブレーキのときには車体を傾けて加速減速を制御するといったこともやっていきたいという。脚がバラバラに動くので、色々な動きを作り込んでいくことが可能なのだ。
ハルキゲニアのようなコンセプトは、クルマとしては新しいかもしれないが、ロボットという視点で見れば、それほど新しいものではない。たとえば脚の先に車輪が付いたロボットはこれまでにも何度も製作されているし、マーズローバーなど、惑星探査用ロボットは、ほとんど同じだと言ってもよい。ただ今回のハルキゲニアは、あくまで街で当たり前に乗る、新しい乗り物としてそのコンセプトを採用した点が新しいのだと言える。
こういう乗り物になってくると、操縦系をどうするかという問題もあるが、ステアリング・バイ・ワイヤーが当たり前になりつつある今、それは些細な問題だろう。ただ、それ以外にも、たとえば脚を持ち上げるといっても実車ではどうやるのかとか、様々な問題が素人目にも思い浮かぶことも事実だ。だからいきなり乗用車という形式ではない形で、この技術を活用していくという手もあり得るという。
●救急車など特殊車両などへの応用も
 |
| 株式会社クリエイティブボックス・澁江建男社長 |
ホイールモジュールにより、フラットな床を実現するというコンセプトは、まず救急車などの特殊車両や、福祉車両に使えると、クリエイティブボックスの澁江建男社長は感じたという。これからの展開については、興味がある会社ならばどことでもコラボレーションする用意があるそうだ。
なお、「ハルキゲニア」とは、「カンブリア・ビックバン」と呼ばれる5億5,000万年前におこった生物進化上のイベントのときに登場した化石生物の名前である。体長0.5cm~2.5cmほどで、7対のトゲと7対の歩脚を持っていた。その奇妙な姿のため「幻覚が生んだ動物」という意味の名前がつけられた。ハルキゲニアそのものは現在に繋がる子孫を残すことなく絶滅してしまったと考えられている。だが、運が良ければハルキゲニアが次のクルマのベースとなることもあり得るかもしれない。
今回、発表された試作車はあくまで制御の実験用車体であり、まだまだ課題も多い。また、実車を作る具体的な計画は今のところない。逆に今回発表することで、この技術コンセプトがどう受け取られるか社会に問うてみたいのだという。確かに車椅子などに応用されることは容易に考えられる。さて、あなたはどう見る? 某マンガに登場する多足の人工知能機械が実現されるといいなと思っている人は多いだろうが。
 |
 |
| フロント・ビュー | 段差への対応 |
●インターフェイス空間としてのクルマ
ついでながら、先日の東京モーターショーで登場したトヨタの「PM」にも触れておきたい。やはりその場旋回そのほかが可能で、なおかつ車車間通信の状態によって車体の色を変えたり、またハンドルではなくジョグダイヤルで操縦するこのクルマは、キャビンと足回りが独立した構造になっている。高速走行時には横に繭状のキャビンが倒れ車高が下がる。乗車・下車のときにはキャビンが立ち上がり、中の座席がスライドアウトする構造になっている。これが本当に実用的かどうかはさておき、一度は乗って操作してみたくなるクルマだ。
 |
 |
 |
| トヨタ「PM」 | キャノピーがあくと座席がスライドして出てくる | キャノピー内部。足元には緊急ブレーキもあるが、基本的に手元のジョグダイヤル状のもので操縦する |
このクルマのコンセプトは「であう、つながる、あつまる」。1人乗りの移動するパーソナル空間だ。1人でいたいが、群れることも好きといったコンセプトで作られたものらしい。これならばバイクで良いんじゃないかという声があちこちでしているが、改良型「i-unit(アイユニット)」は愛知万博でも登場する予定だという。
 |
| スズキのタンデムカー「S-RIDE(エスライド)」。「都市型移動ツールとしてのアクティブコミューター」がコンセプト。2輪と4輪、それぞれの楽しさを融合 |
このクルマ以外にも、今年の東京モーターショーでは、1人乗り、あるいはタンデム乗りのクルマのコンセプトがあちこちで披露されていた。また、燃料電池あるいは大容量キャパシタを搭載し、とにかく電池で駆動するとか、ITSで安全性確保、といったコンセプトも多数見られた。既にホンダのインスパイアは「高速道路運転支援システム(HiDS)」を搭載、前方のクルマを自動追尾するし、危険と判断したときは自動的にブレーキ動作を開始する「プリクラッシュセーフティシステム」を搭載している。
また、クルマの内部は密閉空間であり、人と密着する機械も多い。ユビキタス化も比較的容易だと考えられる。カーナビやリアシートエンタテインメントなど、新しいインターフェイスやデバイスの活躍する余地も多い。
クルマ業界全体が、新しいクルマのありようを模索している。そこにセンサー技術やロボティクス技術など、新しいITはどのように活用されていくのだろうか。今後、PCが吸収・融合されていく場所、インターフェイスの場所としてのクルマのありようにも注目していきたい。
□千葉工業大学 未来ロボット技術研究センターのホームページ
http://www.it-chiba.ac.jp/furo/
□リーディング・エッジ・デザインのホームページ
http://www.lleedd.com/
□日産 JIKOO
http://www.nissan.co.jp/DESIGN/JAPAN/CONCEPTCAR/JIKOO/
□トヨタ、東京モーターショーに新コンセプトの燃料電池ハイブリッド車、パーソナルモビリティなどを出展
http://www.toyota.co.jp/jp/news/03/Oct/nt03_082.html
□ホンダ インスパイア
http://www.honda.co.jp/auto-lineup/inspire/
□スズキ・第37回東京モーターショーへの出品概要
http://www.suzuki.co.jp/release/d/d031014.htm
□第37回東京モーターショーのホームページ
http://www.tokyo-motorshow.com/
□関連記事
【4月5日】【森山】ROBODEX2003レポート 展示はここを見ろ編(2)
~会場に展示された個性豊かななロボットたち
http://pc.watch.impress.co.jp/docs/2003/0405/kyokai06.htm
(2003年11月27日)
[Reported by 森山和道]
【PC Watchホームページ】
PC Watch編集部 pc-watch-info@impress.co.jp 個別にご回答することはいたしかねます。
Copyright (c) 2003 Impress Corporation All rights reserved.