
ルネサス、次世代カーナビ用大規模プロセッサ「SH-Navi3」
 |
| 左から松本、平尾、山内直樹の各氏 |
1月19日 発表
株式会社ルネサス テクノロジは1月19日に東京で記者会見を開催し、同社の自動車用半導体事業の戦略と、カーナビゲーションシステム用SuperHマイコン「SH-Navi」シリーズの新製品「SH-Navi3」(型番:SH7776)を発表した。
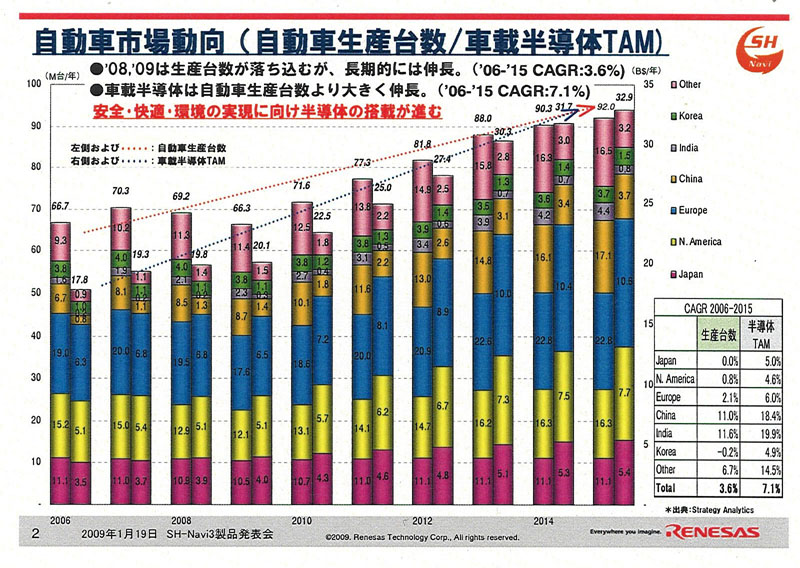
最初に同社のマイコン統括本部自動車事業部副部長を務める山内直樹氏が、自動車用半導体事業の戦略を説明した。世界の自動車生産台数は2009年の今年はマイナス成長となるものの、長期的にはまた伸びるとした。そして自動車用半導体市場(金額ベース)は長期的には大きく拡大するとの見通しを示した。
この拡大を支えるのが自動車のエレクトロニクス化の進展である。2005年には自動車のコストに占める電子制御ユニットの割合は22%に達し、2009年には25%を超えるという。そして2015年には、その割合は40%に達すると予測されている。
 |
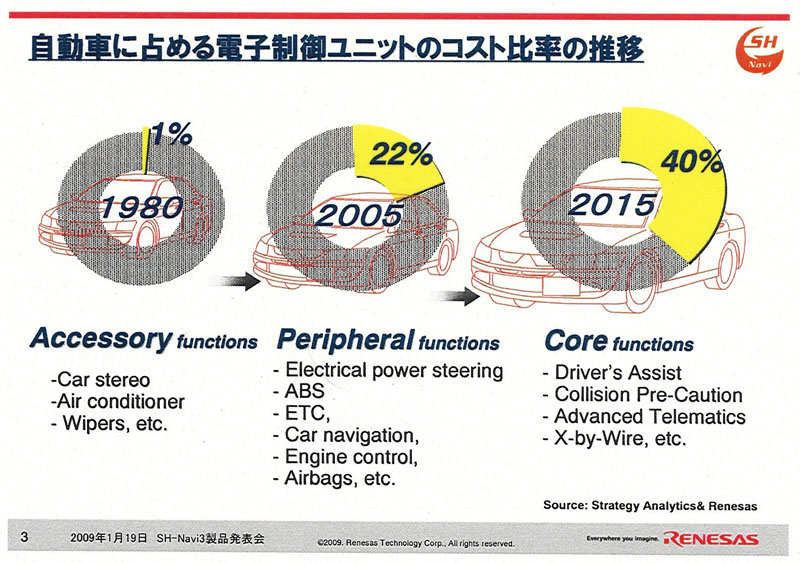 |
| 自動車生産台数と自動車用半導体市場(金額ベース)の予測。2006年~2015年の10年間で自動車生産台数の年平均成長率(CAGR)は3.6%、自動車用半導体市場の年平均成長率は7.1%とみている | 自動車のコストに占める電子制御ユニットの割合 |
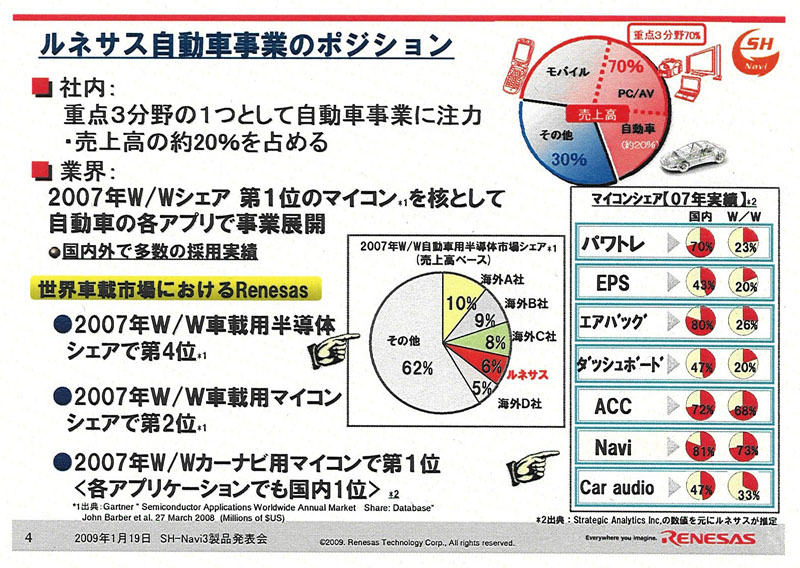
ルネサスは半導体事業の重点3分野を「モバイル」、「PC/AV」、「自動車」と定めており、「自動車」分野の売上高は同社全体の約20%を占める。世界の半導体市場ではベンダー別の売上高順位で4位に、車載用マイコンのベンダー別売上高順位で2位につけている。特にカーナビゲーションシステム向けのマイコンを得意としており、国内では81%、世界全体でも71%のシェアを占める。ただし、PND(Portable Navigation Device)は除く。
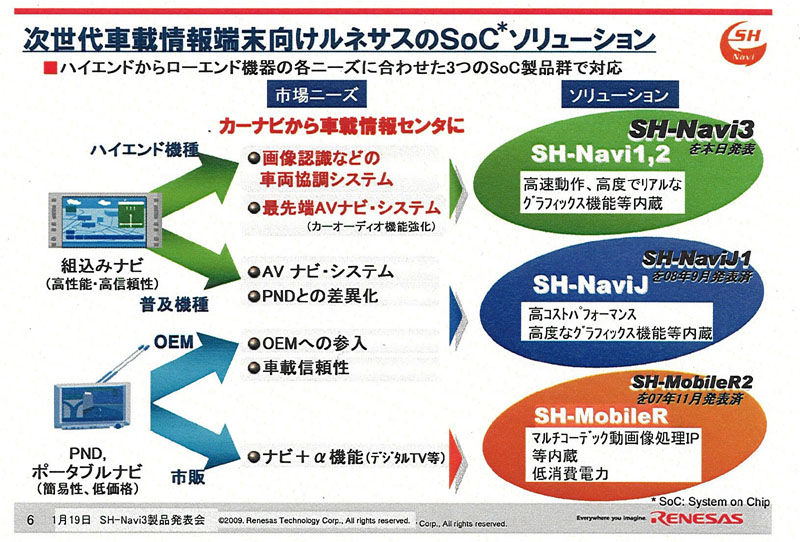
PNDを含めたカーナビゲーション分野にルネサスは、グラフィックス処理ハードウエアを内蔵したハイエンド品向けの「SH-Navi」、SH-Naviのローコスト版であるミッドレンジ品向けの「SH-NaviJ」、PNDなどのローエンド品向けの「SH-MobileR」をそれぞれ提供してきた。
SH-Naviシリーズについてもう少し詳しく述べると、現行世代であるSH-Navi2では画像認識処理回路を搭載した「SH-Navi2V」(SH7774)を2006年7月に、独自の2次元/3次元地図描画回路を搭載した「SH-Navi2G」(SH7775)を2007年5月に製品化してきた。いずれもCPUコアはSuperHマイコンとしては最上位の「SH-4A」コアである。また、このSH-4Aコアを2個内蔵するデュアルコアのSuperHマイコン「SH7786」を2008年8月に製品化している。
これまでに発表されたカーナビ用マイコンの特長である画像認識、グラフィックス処理、デュアルCPUコアをすべて盛り込んだ上に改良を重ねたのが、今回発表されたSH-Navi3といえる。次世代のカーナビゲーションシステムを想定して開発されたマイコンである。
 |
 |
 |
| ルネサス テクノロジの自動車用半導体および自動車用マイコンの売上高順位。いずれも2007年の値 | カーナビゲーションシステム用マイコンの製品系列 | 同じく製品展開 |
続いて、マイコン統括本部自動車事業部自動車応用技術第2部長の平尾眞也氏が、SH-Navi3の概要を説明した。
SH-Navi3は、2009年4月にサンプル出荷を開始し、2010年1月に月産2万個の規模で量産を始める計画である。量産規模は2013年1月時点で月産10万個となる予定。サンプル価格は12,000円。
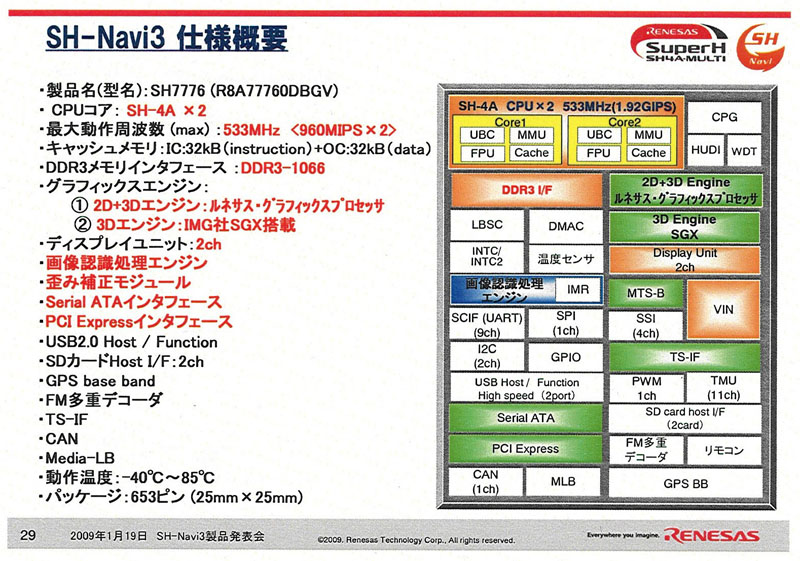
CPUコアまわりは、2008年8月に発表されたSH7786と同様である。最大動作周波数が533MHzのSH-4Aコアを2個内蔵しており、CPUコアごとに1次キャッシュを内蔵する。キャッシュの容量は命令/データともに32KB。最大演算処理性能は1,920MIPSに達する。SMP(対称型マルチプロセッシング)とAMP(非対称型マルチプロセッシング)の両方をサポートするのも、SH7786と同じだ。ただし、SH7786ではグラフィックス処理回路と画像認識処理回路のいずれも搭載していない。より汎用的なマイコン製品となっている。
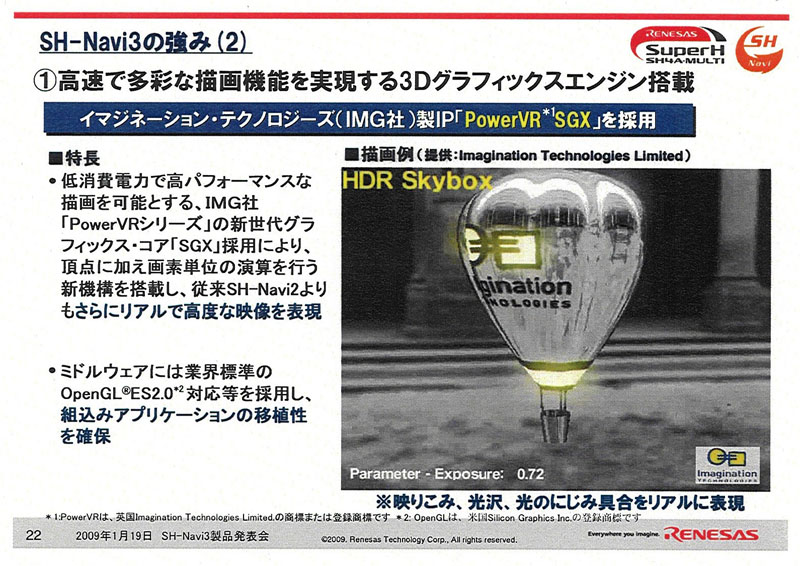
SH-Navi3のグラフィックス処理回路は、SH-Navi2G(SH7775)の後継となっている。2次元/3次元の地図描画回路はSH-Navi2Gが内蔵した回路を引き継いだ。ただし3次元グラフィックスエンジンはSH-Navi2Gでは英Imagination TechnologiesのIP「PowerVR MBX」だったのが、SH-Navi3では高性能版である「PowerVR SGX」に変わっている。この結果、よりリアルな3次元アニメーションを表示できるようになった。
SH-Navi3の画像認識処理回路は、SH-Navi2V(SH7774)の画像認識処理回路(ルネサスと日立製作所の共同開発)をベースに、処理性能を3.5倍に高めたものである。さらに歪み補正モジュールと呼ぶ回路を付加し、カメラの歪み補正処理や視点転換処理などを高速に実行できるようにした。
 |
 |
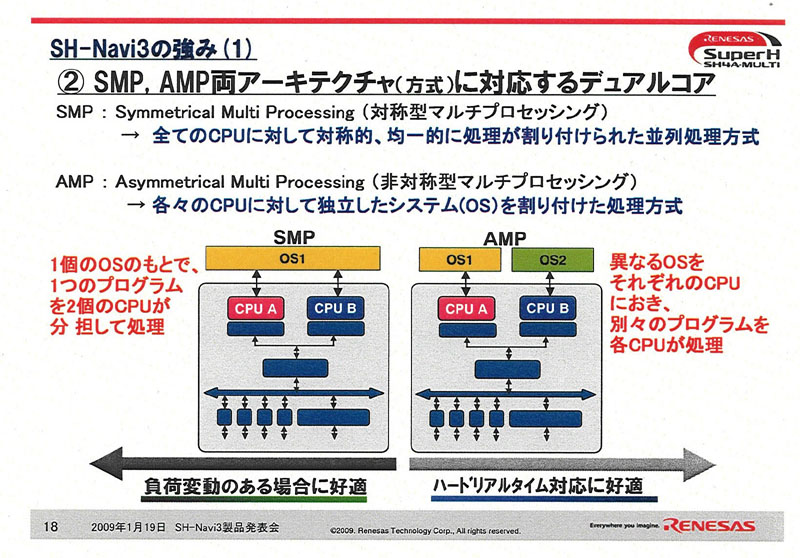 |
| SH-Navi3の概要 | SH-Navi3の内部ブロック | SMP(対称型マルチプロセッシング)とAMP(非対称型マルチプロセッシング)の両方をサポートする |
 |
 |
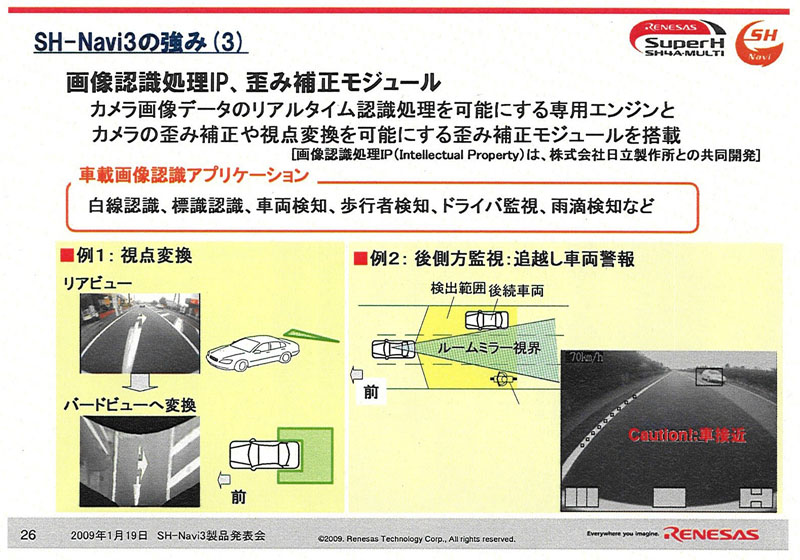 |
| マルチコア構成のSH-4AコアをサポートするOSの例。AMP構成はもちろんのこと、SMP構成でも主要な組み込みOSがサポートを予定している | 3次元グラフィックス処理回路の概要 | 画像認識処理回路と歪み補正モジュールの概要 |
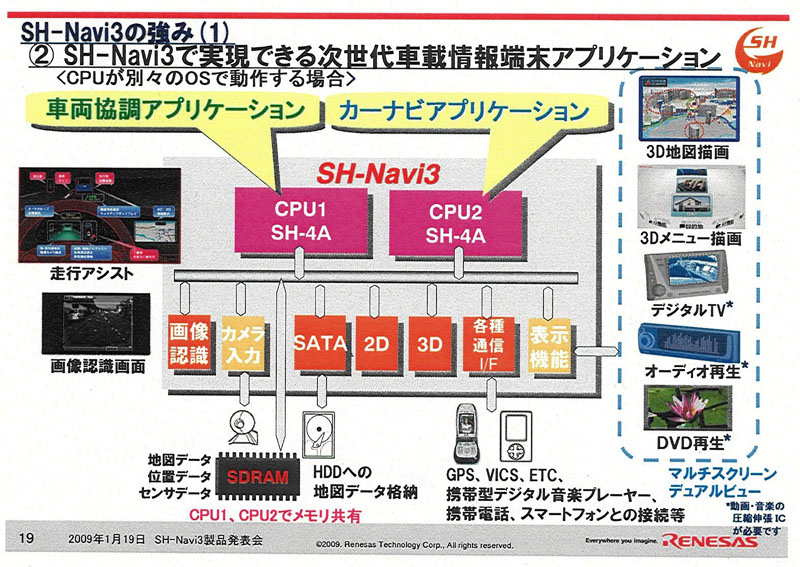
SH-Navi3が想定する次世代カーナビゲーションシステムは例えば、車両協調アプリケーションと既存のカーナビのアプリケーションを連携して動かせるシステムである。ルネサスは「次世代車載端末」と表現していた。2つのアプリケーションが連携することで、新しい機能やサービスなどをシステムに追加できる可能性が広がる。例えば高速道路を走行中に白線認識によって車両の走行レーンを把握し、高速道路の出口が近付いたときに走行レーンを変える必要があるかどうかをシステムが運転者に知らせる、といった機能が考えれるという。
 |
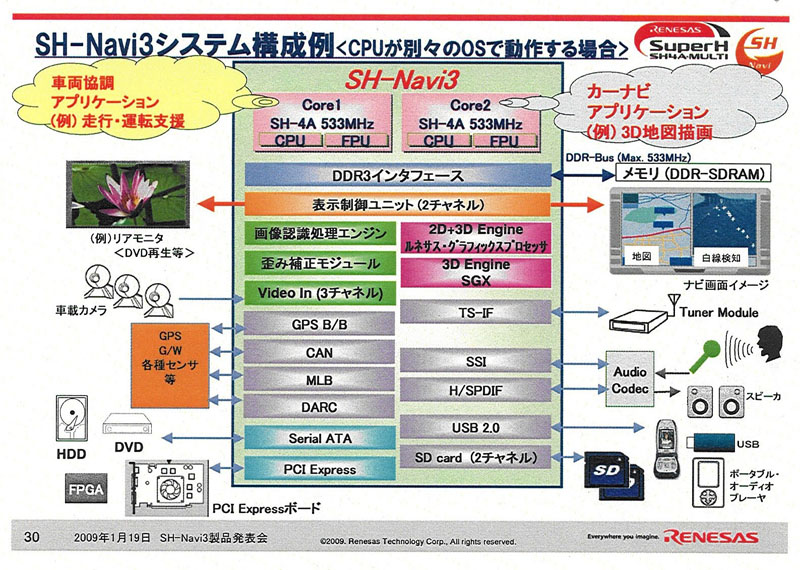 |
| SH-Navi3を利用した次世代車載端末のイメージ | SH-Navi3を搭載したシステムの具体的な構成例 |
□ルネサス テクノロジのホームページ
http://japan.renesas.com/homepage.jsp
□リリース(PDF)
http://japan.renesas.com/media/company_info/news_and_events
/press_releases/2009/0119/20090119j.pdf
□関連記事
【2008年8月25日】ルネサス、カーナビ用のデュアルコアプロセッサ
http://pc.watch.impress.co.jp/docs/2008/0825/renesas.htm
(2009年1月20日)
[Reported by 福田昭]
【PC Watchホームページ】
PC Watch編集部 [email protected] お問い合わせに対して、個別にご回答はいたしません。
Copyright (c)2009 Impress Watch Corporation, an Impress Group company. All rights reserved.