|
| [an error occurred while processing the directive] |
|
HRP-2、人間と一緒に会津磐梯山を踊る
国立学校法人 東京大学生産技術研究所(東大生研)池内研究室と、独立行政法人 産業技術総合研究所(産総研)は12日、共同で、ヒューマノイドロボット「HRP-2」に、会津磐梯山踊りを踊らせることに成功したと発表し、記者会見でデモを行なった。 会津磐梯山を会津民謡玉水会の人に踊ってもらい、会津大学開発の32点の光学式モーションキャプチャーシステムで観測を行なった。そして特徴的な動きを抽出したあと、ヒューマノイドに可能な動きに変換した。CRESTの「文化遺産の高度メディアコンテンツ化のための自動化手法」の一環として実施されたもの。
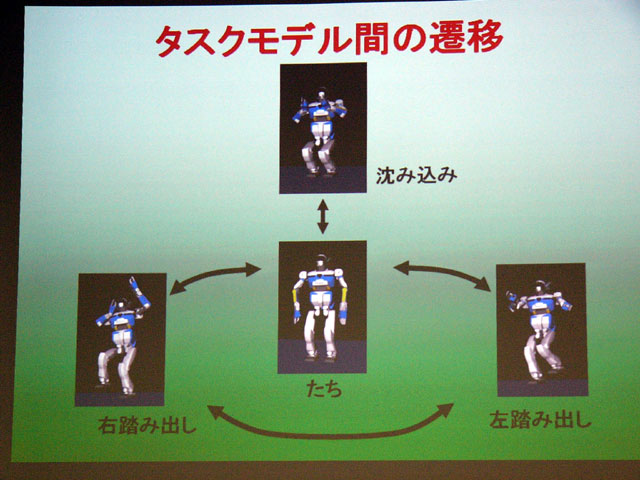
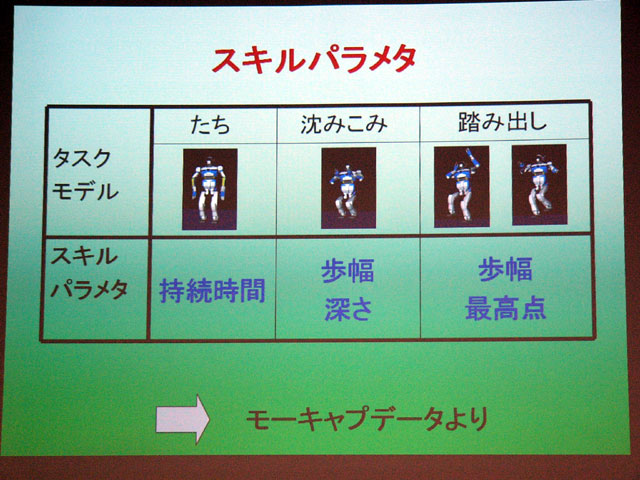
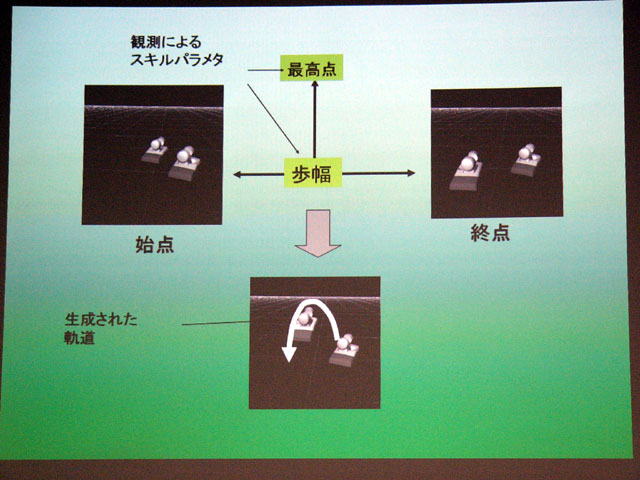
もともと池内研究室では文化遺産をデジタル技術で保存することに取り組んでいた。無形文化財の場合、ビデオテープで演者の動きをアーカイブすることがふつうの手法だが、それでは教材にしかならない。実際に演ずることができるものが必要だということで、動的にアーカイブするためにヒューマノイドを使うことになったのだという。 もともと池内研究室では文化遺産をデジタル技術で保存することに取り組んでいた。無形文化財の場合、ビデオテープで演者の動きをアーカイブすることがふつうの手法だが、それでは教材にしかならない。実際に演ずることができるものが必要だということで、動的にアーカイブするためにヒューマノイドを使うことになったのだという。 このシステムでは、人間の動きから、ロボットが「何をするか(タスク認識)」、「どのようにするか(スキル認識)」それぞれを把握し、ロボットの動きに変換することができる。 まず、人間の動きを画像から観測し、各ポーズの遷移速度から何をやっているかを認識するソフトウェアを作った。その動きをそのまま単純にマッピングするとロボットは転倒してしまうので、動力学シミュレーターなどを使い、ロボットに適した動きに変換してやる必要がある。 特に、上半身はともかく、下半身はバランスを取らなければならない。そこで上半身の運動と下半身の動きを分け、下半身のほうはトップダウン的にタスクモデルを設計した。具体的には、「たち」、「沈み込み」、「右踏みだし」、「左踏みだし」の基本的な動きをつくり、その動きの遷移であると捉えさせた。
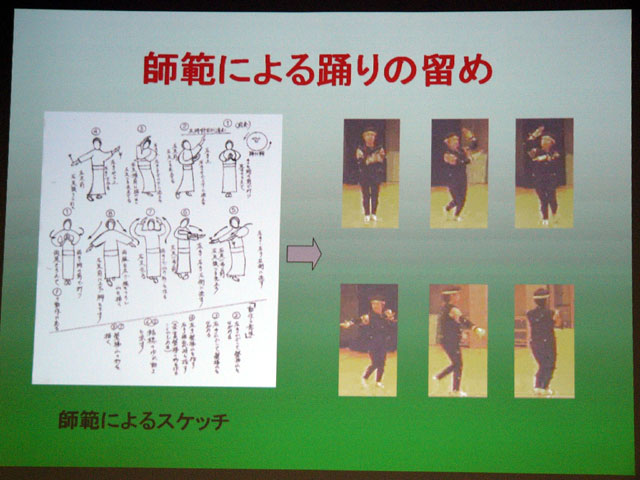
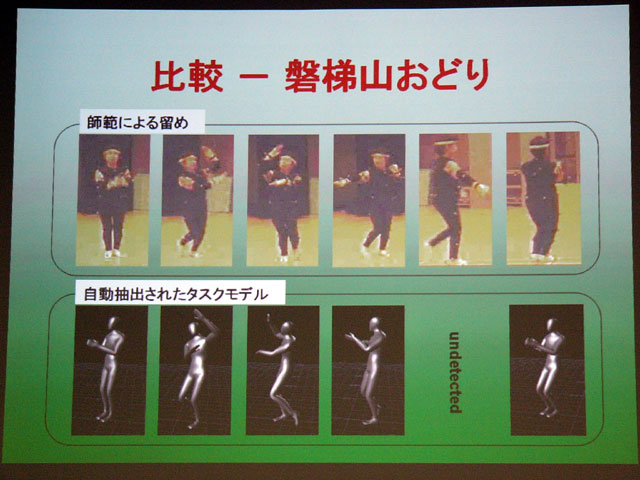
いっぽう、上半身のほうは基本的にモーションキャプチャーからタスクを自動抽出させている。会津磐梯山の動きには「留め」と呼ばれる特徴的な動きがある。まず踊りの師範から踊りのスケッチをもらい、どういうふうにするかタスクのサンプルを作った。 次に、音楽のリズムと動きは同期しているという仮定を置き、動きを自動抽出するために、音楽のリズムと身体の各部が止まる部分を自動抽出させるソフトウェアを作ることで、踊りの留めのタスクモデルを自動抽出させることに成功したという。これは、未知の舞踊についても自動的タスクモデルが抽出できることを目指しているためだ。
そして逆運動学で関節角度を計算し、できるだけ動きをなめらかにし、最終的に産総研の動力学シミュレーターでZMPを計算して動きを生成したという。 池内教授は、「ロボットの動きに合わせて動きを作ったのではなく、人間の踊りを観察し、特徴を自動抽出し、踊りの特徴を保持しつつ、ヒューマノイドロボットの動きを自動生成した点、そして人間と共演を実現した」点を強調した。これによってヒューマノイドロボットの問題点も明確化するし、新たなメディア芸術の可能性も出てくるという。 ロボットと人間は関節自由度も関節速度も違うため、まったく同じにはなりようがない。もともと、人間同士で踊りを真似るときでも同じ問題がある。だが、身長や体重が違っていても、あるいは身体にハンディキャップがある人でも踊りは踊れる。それは人間が、踊りの本質を抽出しているためだと考えられる。 今回のシステムの目的は、踊りの本質的な動きを取りだすことにある。計算機で「踊りのポイント」を抽出する点が、ビデオで単にアーカイブすることに対するアドバンテージであるという。 また、将来は「ロボット100台と人間100人くらいとで、ロボットミュージカルをやるといった展開もあり得る」と語った。
□東大 池内研究室 (2005年1月13日)
[Reported by 森山和道]
【PC Watchホームページ】
|