 |


■森山和道の「ヒトと機械の境界面」■PCのなかでロボットが走り、バク宙!
|
10月17日、「第2回ROBO-ONE on PC発表会」が川崎産業振興会館で開催された。ROBO-ONE on PCは、ホビイストによる二足歩行ロボット競技会のシミュレーション版。
今回は「月面サバイバルシミュレーションコンテスト-ミッション2」と題され、1/6重力の設定で、26cmの裂け目を飛び越えるという課題に32人がエントリー。22名が参加した(発表会出席者は20名)。優勝賞金は50万円。
●ROBO-ONE on PC、その心は?
ROBO-ONE on PCは、地球重力の1/6の設定で行なわれる。これは「ROBO-ONE委員会では2010年に宇宙大会を行なうことを目指している(ROBO-ONE委員会代表・西村輝一氏)」ためだ。将来、月面でROBO-ONEをやりたいのだという。
この話がどこまで本気かはさておき、ROBO-ONEでは今後、宇宙大会カウントダウン大会として、いくつかのイベントを企画している。まずはマカオタワーの上でロボットを歩かせてみたいとして、現在交渉中だという。ただしコントロールは日本から遠隔で行なうこととするそうだ。現時点では、2005年3月19日に実施することを目指して調整中だ。
さらに、急降下することで無重量状態をつくり出す飛行機を利用して、無重量状態のロボット動作や制御なども検証していきたいという。
 |
 |
 |
| ROBO-ONE委員会代表・西村輝一氏 | 宇宙大会マイナス5回大会「宇宙に最も近いROBO-ONE大会」。マカオタワーで2005年に実施を検討中 | ROBO-ONE IN 無重力。2006年目標 |
ROBO-ONE on PCは、この宇宙大会を目指す一環だとされている。実際にはラジコンサーボを使っているロボットが宇宙で動くはずもない。宇宙大会の話だけ聞いていると、いったいどこまで本気なのかさっぱり分からなくなるのだが、ここにはいろいろな考えが隠されている。
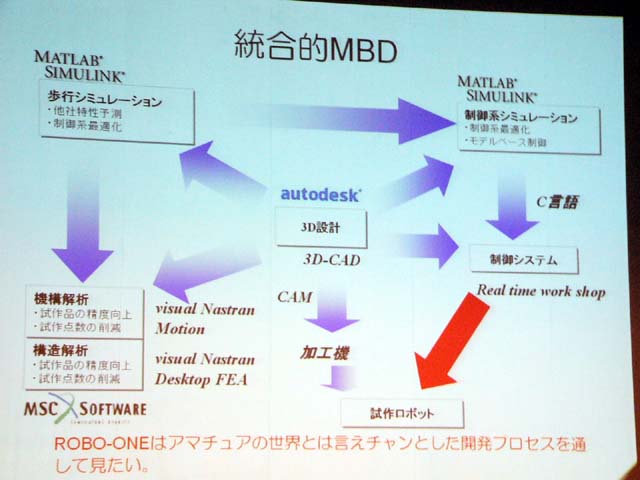
現在、ロボットや車の世界では、コンピュータ上で設計、機構や構造の解析を行ない、メカ、センサー、ソフトウェアなど丸ごと実際の動作まで検証して、最後に実機に適用する「モデルベース開発」と呼ばれる手法が一般的だ。この手法の発展により、工場から出てきたロボットをすぐに動かすことが可能になり、ロボット開発の速度も大きく上がった。
シミュレーションソフトは、通常、プロフェッショナルが使うため、かなり高価なものだ。それを「素人」が使ってみたらどんなことができるか。西村氏はそのように考えてスポンサーをつのり、ROBO-ONE on PCを始めたのだという。
ROBO-ONEのロボット製作者たちのやりかたはトライ&エラーが基本だが、それをまずPCの上で行なえば、コスト面でも大きな恩恵があるはずだ。もし「素人」が3DCADや物理シミュレーションソフト各種を使いこなせるようになれば、ホビイストの世界にもまた新しい流れが生まれる。「趣味」でロボットの設計、シミュレーションを行なう、新しい文化が生まれるのだ。
 |
 |
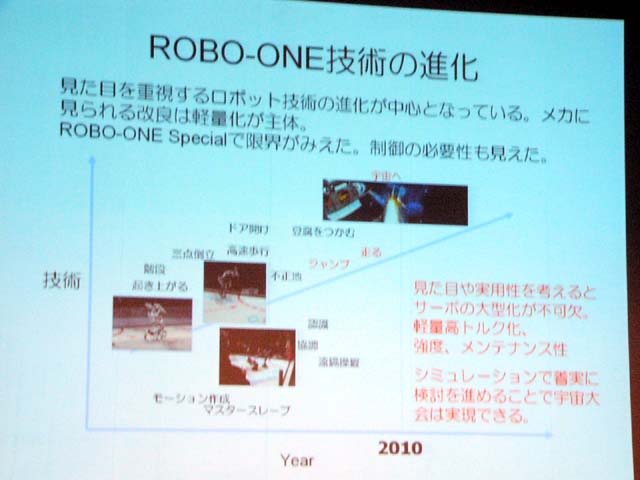 |
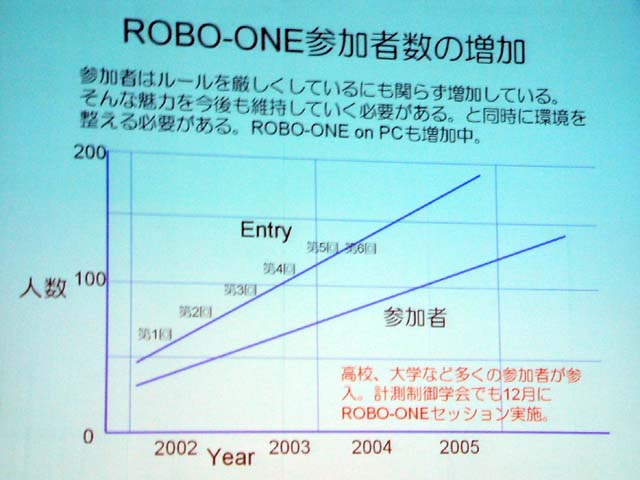
| 統合的モデルベース開発概念図。アマチュアのROBO-ONEでも開発プロセスを導入していきたいという | ROBO-ONE参加者数の推移 | ROBO-ONE技術の進化 |
また、宇宙大会を行なうとすれば、宇宙空間でのロボットのエネルギー源や、ロボットのコントロールをどうするかといった問題、ロボット同士のコミュニケーションの問題、無重力下でのロボット制御の問題などを検討しなければならない。
その検討の過程を通して、ロボット同士の通信プロトコルの統一や、協調動作技術の発展、標準ロボット言語の検討、人間とのコミュニケーションの問題、ロボットのOSの問題、画像認識技術やリアルタイム制御の問題など、各種技術が発展していく、というわけだ。
また、日本ではロボットというとどうしても機械系、あるいはエレクトロニクス系の人が取り組んでいることが多いが、実際にはソフトウェアの知識もかなり必要だ。そういった面でも、ROBO-ONE本戦とon PCは、ロボット製作技術の両輪を担うものだと言えるだろう。
●見事な“演技”が繰り広げられた発表会
さて、そろそろ発表会の内容に移ろう。ROBO-ONE on PCでは、オートデスク株式会社の「Autodesk Inventor」でロボットの3Dデザインを行ない、その後、サイバネットシステム株式会社のMATLABの「Simulink」、「Stateflow」でロボットの制御プログラムを記述する。そしてエムエスシーソフトウェア株式会社の「MSC. visualNastran4D」(vN4D)で機構解析や構造解析、いわゆるシミュレーションを行なう。
中間のステップを飛ばすことも可能だが、それぞれのステップでの作業をどれだけこなしたかが得点になるため、たとえば構造解析などを行なっていないと、優勝することは難しくなる。
InvestorからvN4Dへのデータ変換に手間取る人も多かったようで、現状のスペックでは、パーツをまとめるなどしてシンプル化しないと、なかなかシミュレーションそのものが動かないようだ。
筆者は2003年10月18日に行なわれた第一回ROBO-ONE on PC発表会も取材したが、当時は記事にしなかった。しなかったというか、記事として書くことができなかったのである。だが今回は、あっと驚く成果を出す人々が続出。ROBO-ONE本戦大会が始まったばかりの興奮と似た感覚が蘇る発表会となった。
特に優勝したnobo氏はデザイン、強度設計、機構解析、シミュレーションとほぼパーフェクトの結果を発表。シミュレーション動画が披露されたときは会場がどよめくほどの完成度を見せた。
2003年の4月ごろにROBO-ONEのことを知り、即座に出たいと思ったそうだ。実機は敷居が高かったが、シミュレーションならばと思い、on PCへの出場を決めたという。
 |
 |
 |
| 第二回ROBO-ONE on PC、第1位を勝ち取ったnobo氏 | nobo氏の結果概要。ロボットはももとすねの長さを一致させ、直交軸を採用、そして全体の質量バランスをできるだけ取るなどの工夫をし、制御しやすい機体として設計されている | 構造解析の様子。nobo氏は強度を確かめたい足裏だけに焦点を絞り、解析を行なっている。当初の板金の厚さでは強度が足らないことが分かったため、1.5mm厚から2mm厚に変更している |
 |
 |
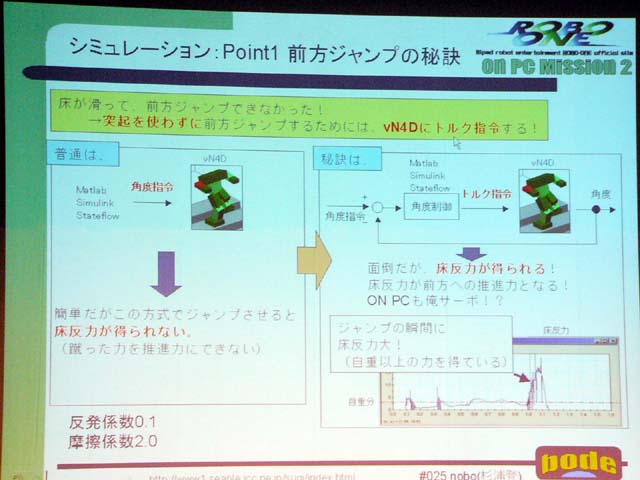 |
| 【動画1】【動画2】ジャンプだけではなく、綺麗な着地を実現。さらに空中一回転までも。地面から離れた非接地状態では、空中での姿勢制御技術が必要だ。だがROBO-ONEのロボットでそれは難しいので、むしろ空中で安定した姿勢を取れる離陸を心がけて、空中での制御はしてないという | ROBO-ONEのロボットは角度を指定して使用するラジコンサーボモーターを使っている。だが、角度指令を出すやりかたでは満足な床反力が得られない。平たく言えば、地面をけり出すことができない。そのためnobo氏はじめ上位の人たちの多くは、トルクを指令して、結果の角度をもう一度フィードバックさせることで、床反力を得ていた | |
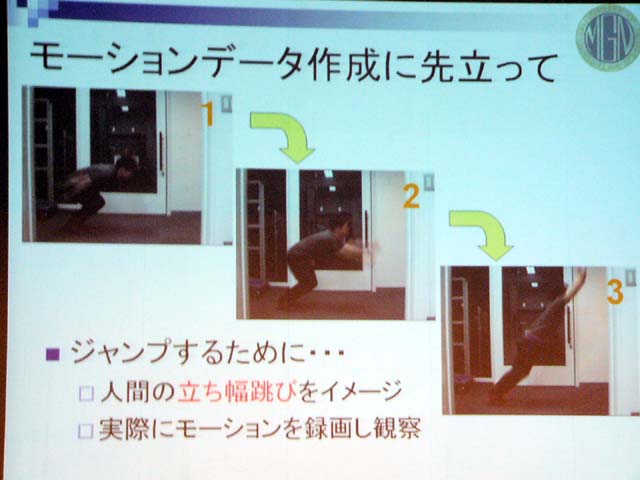
nobo氏は、自分自身でジャンプした様子をビデオに撮り、その様子を参考にしながらモーションを作ったという。腕を使ったり使わなかったりとそれぞれのやりかたを試しながら考えたそうだ。「なるべく地面との摩擦力が稼げるようにベタ足になるようにモーションを作った」という。
 |
 |
| 柔軟接地 | バランス制御 |
もう1つの難しいポイントは着地である。サーボにトルクをかけたまま着地すると、いわば関節が硬い状態のままなので、床で思い切り跳ね返ってしまう。重力の設定が低いon PCではなおさらだ。衝撃を吸収するためには柔らかくサーボを制御してやる必要がある。この手の、力をやわらかく制御するやりかたをコンプライアンス制御という。nobo氏は、足裏センサで着地したと判断された瞬間、サーボゲインを弱くすることでこの問題を解決していた。文字で書くと簡単なようだが、今回、ここまで綺麗に着地していたのはnobo氏の機体だけである。
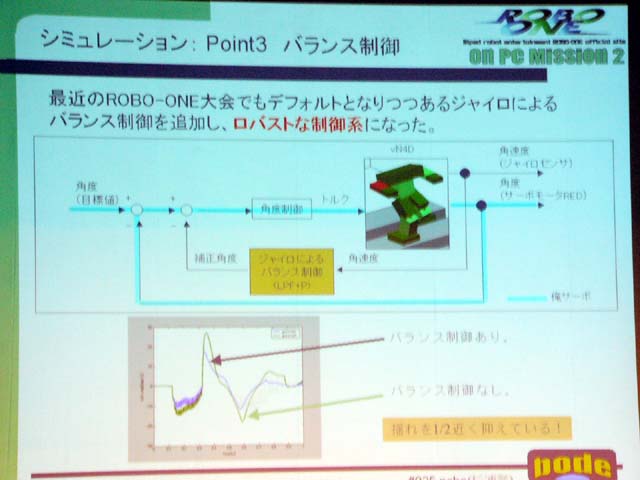
姿勢のブレの吸収は、ジャイロを使って補正する。ROBO-ONEでは実機を使う本戦でもジャイロや力センサーなどを用いるロボットが増えている。当然のことながら、シミュレーションのon PCでもやはりセンサーからのフィードバックをかけた機体の安定性は比較すると段違いで、次回以降はシミュレーション上でのロボットの動作レベルもさらに向上しそうだ。
また、ROBO-ONEのロボットがどのように制御されているか理屈を知りたければ、かなり丁寧に仕組みが説明されるROBO-ONE on PCを見るのが手っ取り早そうである。
マスタースレイブのロボット操縦で、ROBO-ONE本戦でもお馴染みの津藤智氏は、2位の結果に。だが、月面重力設定ではなく、地球重力の設定で、走るロボットシミュレーションを披露した。
津藤氏は現実的なトルク制御型サーボモーターモデルを構築してトライ。設計段階からシミュレーションを考慮して設計することの重要性など、ベテランならではの経験の蓄積も見せた。また空中での姿勢制御にもトライしたが、そちらには失敗したので、次回以降はフィードバックではなくフィードフォワードで、ある程度決まった姿勢を繰り出すことでトライするという。
 |
 |
| 津藤智氏 | 津藤氏のモータの設定 |
 |
 |
| 【動画3】跳躍 | 【動画4】走行のシミュレーション |
モーションをタスクに分割して目標姿勢を指定し、逆運動学で目標関節データを出し、角度情報をフィードバックさせながら5msec周期で制御している。跳躍の着地時にゲインを調節してバネダンパーとするところはnobo氏と同じ。
走行は、最初は「ばたついていた」が、歩幅やタイミング、そして前傾姿勢などをコントロールすることでよりスムーズになったという。「消化不良だが、モータスペック次第では実機でもできそうな感触を得た」とのことなので、実機での実現に期待したい。メーカー側にも、高速かつトルクのあるサーボの開発を期待する。
西憲一郎氏は実機のロボット「JOE」を携えて参加。ミッションをクリアすることよりも、むしろ実際のロボットの動作をシミュレートすることと、やはり角度ではなくトルクを制御するサーボモーターのモデルを作ることを目的として参加。そのほか、逆運動学によるロボット動作などを行なったが、強度解析、構造解析を行なっていなかったため、3位の結果に。
 |
 |
| 【動画5】西氏のJOE。実機ではうまく歩行するのだが、シミュレーション上では微妙に制御がうまくいかない | |
そのほか、いくつか面白かった参加者の動画を紹介する(提供:ROBO-ONE委員会)。
 |
 |
| 【動画6】ROBO-ONE本戦の常連でもある坂本元氏のシミュレーション結果。実機をそのままシミュレートしている。ところが実機では抜群の安定感を誇る本戦ベテランでもシミュレーションにはなかなか一苦労 | 【動画7】計測制御を専門とする学生による「ナベ☆ケン」チームのシミュレーション結果。ロボットのデザインイメージは「アメリカンフットボール」。今後は実機と連動させて、ROBO-ONE本戦への出場をねらうそうだ |
 |
 |
| 【動画8】諏訪東京理科大学ロボット研究会。人間のモーションをビデオで撮影し、基本的には放物運動だと考えて挑戦。ROBO-ONE本戦にも果敢に挑んでいるグループだ。だがやはり角度制御では初速が得られず、今回のシミュレーションは残念ながら失敗。ちょうど参加者全体の真ん中くらいのレベルではなかろうか | |
 |
 |
| 【動画9】Shin13氏の「Kuri Kuri Fighter」が、裂け目を飛び越そうとするところ。3点接地足裏構造を持つこのロボットは低トルクサーボを使っているので地球重力下での実機では、もちろんこうはいかない。だが、こんな様子を実機で見られるようになると楽しいだろうなと思わせられる映像だ | 【動画10】フィードバック制御をかけると多関節化の副作用である自己外乱がおさまるよといったことを示す様子。機体の振幅周期に合わせて左右の重心移動を行なうことが重要だとまとめた |
 |
 |
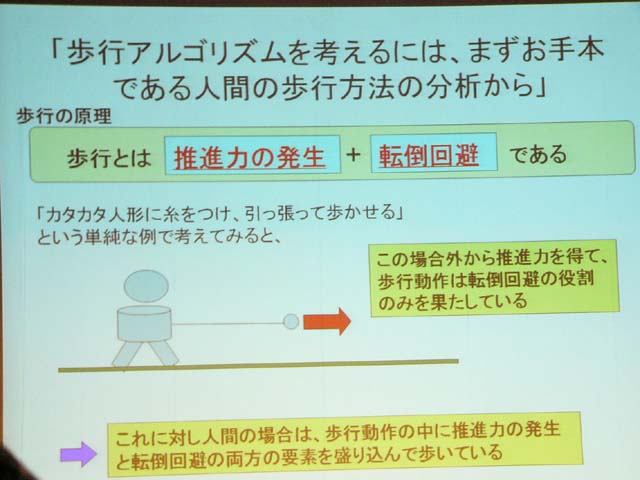
| 受動的な力を利用して歩行するパッシブウォーク型のアルゴリズムを提案する人などもいた(月夜野宏氏)。今後が楽しみな発表だ | |
●PCの新たな用途としてロボットのシミュレーションを
 |
| 静岡県立浜松工業高校 機械科&知的制御研究部の発表の模様。ロボットは「舞夢」。今大会ではこのロボットをシミュレーション上で動作させることにトライ |
今回のon PCには高校生(静岡県立浜松工業高校 機械科&知的制御研究部)も参加するなど、非常にバラエティに富んだ発表会となった。最近のPCはだいぶ速くなったが、それでもシミュレーションソフトを動かすには重たく、時間がかなりかかるという。大きく上昇したスペックをむだにしているPCをもてあましている人は、ロボット開発にトライしてみるのも面白いのではないだろうか?
電車のなかでノートPCを開き、モーションを組んだりするのも楽しそうだ。自宅に帰り、組んだプログラムを吐き出せば、そのまま実機が動作する。最近は近藤科学が発売した二足歩行ロボット「KHR-1」が800台以上も売れているが、実機には敷居が高いと感じている人でも、ロボットにトライできるのである。
趣味はロボット製作。そんな人たちがどんどん増えると、なんだか楽しそうだ。日本全国でそんな人たちが増えてくれば、ROBO-ONEそのほか、アマチュア・ロボットの世界もずいぶん変わってきそうだと思うのだが、どうだろうか。
メカが得意な人はメカ、エレキが得意な人はエレキ、ソフトが得意な人はソフト、それぞれの分野で力を伸ばしていけばいい。現状のROBO-ONEも、そういう人たちが集い、情報交換する場所として機能しているわけだが、今後はさらに、お互いのコラボレーションなども始まるかもしれない。そうすれば、さらにROBO-ONEの風景は変わってきそうだ。
なお、優勝したnobo氏は、12月7、8日に東京ドームプリズムホールで開催される「MATLAB EXPO 2004」で講演する、という「副賞」もついている。これを機会にトライしてみたい人、参加者の話を実際に聞いてみたい人は足を運んでみるといいだろう。
□ROBO-ONEのホームページ
http://www.robo-one.com/
□MATLAB EXPO 2004のホームページ
http://www.matlabexpo.com/
(2004年10月26日)
[Reported by 森山和道]
【PC Watchホームページ】
PC Watch編集部 pc-watch-info@impress.co.jp 個別にご回答することはいたしかねます。
Copyright (c) 2004 Impress Corporation All rights reserved.