
|
ロボカップ ジャパンオープン2006開催
~世界大会に向けて各チームがキックオフ
 |
5月4日~5月6日開催
2006年5月4日~5月6日、福岡県北九州市・西日本総合展示場にて、ロボカップジャパンオープン2006北九州が開催された。昨年は日本(大阪)で世界大会が行なわれたため、国内大会は2年ぶりとなるが、10種類の競技に総計175チームが集結し、3日間を大いに盛り上げていた。
●自律型ロボットの祭典:ロボカップ
'97年から始まり、まる10年を迎えた「ロボカップ」は、世界規模の参加者を集めるロボット競技会だ。その大きな特徴は、ロボットはロボットでも、基本的に自律型ロボットによる競技会である、という点だろう(共催には「社団法人 人工知能学会」も入っている)。
今回取材した“ジャパンオープン”は、世界大会が日本で行なわれない年には必ず開催されてきた、ある意味世界大会の前哨戦となる大会である。基本的に国内の参加者のみが集まるために、規模こそ及ばないが、世界チャンピオンチームを複数有する日本での大会だけに、そのレベルは高いものだ。
競技は「2050年までに人間のサッカーワールドカップ優勝チームと対戦し、勝利する」という壮大な目標を掲げる【ロボカップサッカー】を中心として、大規模災害の救助にロボカップの技術を活かそうという【ロボカップレスキュー】、そして次世代を担う子供たちが出場する【ロボカップジュニア】という3つのカテゴリーに分かれている。
さらに、その中はロボット規格の違いでリーグに分かれており、それぞれのリーグで競技が行なわれているのだ。今回はメインストリームである【ロボカップサッカー】を中心にレポートをお届けしよう。
●ダイナミックな中型機リーグ
中型機リーグは、人間と同じサッカーボール(ただしオレンジ色)を使って競技を行なっているリーグだ。
機体は底辺が一辺30cm以上50cm未満の正方形、高さが40cm以上80cm以下という制限内で作られており、12m×8mという、ロボカップサッカーの中で最大のフィールドを使っている。ファウルで試合を止めたり、ラインを割ってどちらにボールを蹴る権利があるかなどは、レフェリー用のPCから全機に対して指令が飛ぶことになるが、それ以外は完全自律のロボットが最大6機ずつで戦う。
今大会には昨年の世界チャンピオン「EIGEN」(慶応義塾大学)やベスト8の「WinKIT」(金沢工業大学夢考房)をはじめ、7チームが集まって総当たり戦を行なった。
前述した実績のある2チームが順調に勝利を重ねたが、動きのほうは本調子とは言えず。一方、地元・北九州の「Hibikino-Musashi」(九州工大&北九州市立大)はその2チームを撃破して、結果無敗のまま優勝。昨年の世界大会では予選リーグで敗退していたが、今年は違うぞと思わせる、勢いに乗った勝利だった。
このリーグの特徴は、ロボカップが目指す未来像、つまり「人間のサッカーワールドカップ優勝チームと対戦する」という目標に“分かりやすく”近いという点だろう。
フィールドこそ違え、ボールは同じサイズだし、ロボットは自身の一番高いところにある全方位カメラを通して、周囲の状況を「色」や「形」で取り込み、内部のCPU(「EIGEN」などはノートパソコンがまるごと入っている)で判断して、ボールを追いかけている。
動画を見てもらうとわかると思うが、フィールドが平らであることと、ボールやゴールの色や形がロボットに合わせられていることが条件だが、今のままでも小学校低学年の子供相手なら十分サッカーが成立しそうなくらいにも思えないだろうか? 能天気な想像かもしれないが……。
 |
 |
 |
| 【動画】キーパーがメンテのためにいったん出ている間に行なわれたセットプレー。ゴールキックからのこぼれ球をWinKIT(金沢工業大学夢考房)が押し込もうとするが、一瞬早く回り込んだディフェンダーが阻止 | 【動画】ゴールキックしようとする「The Orient」(東洋大学)のディフェンダーからWinKITのフォワードがするっとボールを奪い、そのままゴールにボールを蹴り込む | ドリブルするWinKIT。空中に浮かせるシュートを実現する機構はさまざまだが、WinKITの場合はアームのようなものが装備されている |
 |
 |
| 【動画】EIGEN対WinKITの戦い。スローイン(ロボットには手がないのでキックインだが)から攻め込んだWinKITに対して、EIGENのキーパーがすばやく反応。スペースが開いたほうへ大きくクリアする。お見事 | 【動画】同じくEIGEN対WinKIT。ゴールキックから一気に攻めあがるEIGENに対し、体を入れてスローインに逃げるディフェンダー。形こそロボットだが、戦略は人間のサッカーとまったく同じだ |
●スピードと精度の小型機リーグ
直径18cm、高さ15cmという大きさの制限がある小型機リーグは、フィールドの大きさが490cm×340cm。一目で全体が見渡せる中で、5機ずつのロボットが対戦する。
じつは小型機リーグのロボットたちは、自分の体に「眼」がない。ボールを認知して自律で動き、ゴールを目指すために使っているのは、“グローバルビジョン”と呼ばれる、天井から下げたカメラで全体を見渡す方法だ(中型機のように機体にカメラがついているものは“ローカルビジョン”)。
カメラで取り込んだフィールドの情報を無線LANで各機体に飛ばしているのだ。機体の上面だけがカラフルだが、中央に記されているのがチームの色(青/黄)で、あとは“背番号”のように、個体と方向を識別するためのマーカーである。
中型機リーグと同じく、ゲームがスタートしたらロボットの操縦ができず、レフェリーによるボール権の指示が出る以外は完全自律だ。
このリーグには世界チャンピオンこそいないが、ここ数年、ジャパンオープンでは1点も取られていないという「RoboDragons」(愛知県立大学)が君臨し、それを追いかける「Toin Albatross」(横浜桐蔭大学)以下、国内チームという図式になっている。
RoboDragonsは今回も安定した強さを発揮し、決勝にあがるまですべて10-0(予選リーグは10点でコールドゲーム)で勝利。ライバルToin Albatrossも調子を上げながら無失点で決勝まで進んだ。
2校が激突した決勝戦は、開始直後にRoboDragonsが伝家の宝刀“ワン・ツー”で先制。しかしToin Albatrossのほうも、直後に流れの中からロングシュートを決めて同点に。これは情勢が大きく動くか、と思われたが、RoboDragonsのほうはあわてず騒がず、セットプレーであっさり突き放し、その後も順調に加点していって、最終的には7-1で優勝を決めた。
RoboDragonsは同チームが最初に始めたという“ワン・ツー”を超える“ワン・ツー・スリー”を決勝で披露した。ゴルフボールを正確にコントロールする精度と、ロボカップ随一のスピードで、「戦術」が堪能できる見所の多いリーグだった。
 |
 |
| 天井にぶら下がっているのが“グローバルビジョン”のカメラ。1校だけは中央に配置して広角レンズでフォローしていたが、他校はフィールドを2分割して2つのカメラで撮影していた。広角レンズだとやはり歪みが影響するらしい | 【動画】Toin Albatrossの同点弾。シュートコースが空いた瞬間、間髪入れずに放ったものが決まった |
 |
 |
| 【動画】流れの中からパスを通し、ゴールポストギリギリにシュートするRoboDragons。受ける側のロボットはフェイントのように動きながら待ち受けている | 【動画】Toin Albatrossのセットプレー。RoboDragonsはパスコースを読んでスッと壁から離れ、ブロックしてしまう。世界レベルになると、こういった素直なパスは通らないのは当たり前とか |
●四足リーグ
四足といっても自作ロボットによるものではなく、ソニー製AIBOによるワンメイクリーグである。ハードウェアの改造は禁止なので、見た目は普通のAIBOたちが走り回る競技だ。
普通と違うのは、ボールにじゃれ付くのではなく、ゴールの位置を把握して、インサイドキックやアウトサイドキックでゴールに向かってボールを進めていくテクニックである。このテクニックを身に付けるために、AIBOたちの頭脳は公式サイトで用意されているOPEN-R SDKソフトウェアで改良されたモーションで動いている。
競技自体はとてもシンプルだ。ボールにプレイヤーが集中し、連携が見えにくいという点でいけば、小学校低学年くらいの子供たちのサッカーというイメージが使いかもしれない(実際には連携も行なっている、らしい)。
「asura-fit」(福岡工大)と「Jolly Pochie」(九州大&東北大)で争われた決勝は、5-2でasura-fitの勝利。世界大会では合同チームを組むasura-kit(九州工大)も3位となり、二次リーグ敗退だった昨年のリベンジも期待できそうだ。
 |
 |
 |
| 【動画】ボールにごちゃごちゃと集まるフィールドプレイヤー。お互いに相手の位置はわからないようで、コースが空いていないところに無理やりボール打とうとする機体も | 【動画】asura-kitのキーパーがボールに反応してガードしているのがよくわかる。それだけじゃなく、危ないボールはセーフティにタッチラインの外に出すナイスセーブ | 【動画】四足リーグ設立当初から参加している、老舗の「BabyTigersDASH」(大阪市立大&龍谷大&大阪大)が見せた“バックパス”。これで受け側に待っているフォワードがいればカッコイイのだが |
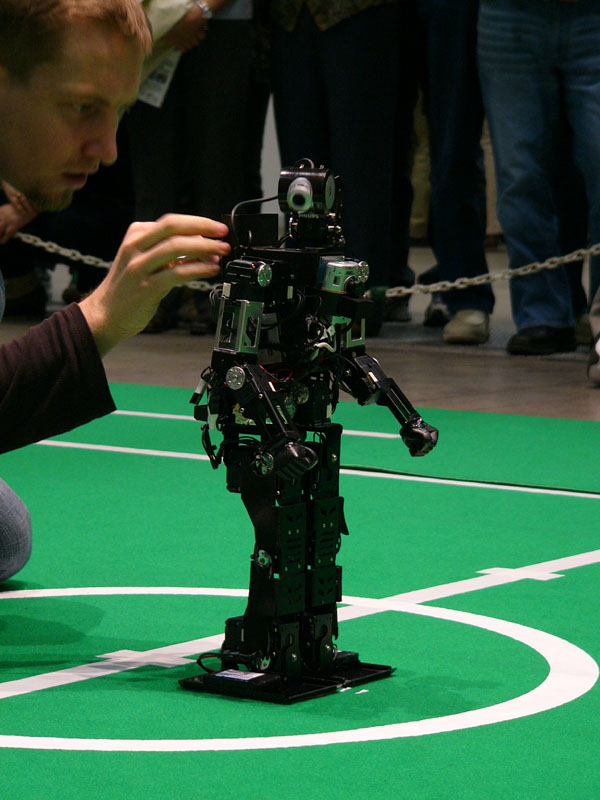
●寂しかったヒューマノイドリーグ
世界チャンピオンである「Team Osaka」が注目を集めるリーグであり、「2050年」を目指すためには進化が期待されるリーグでもあるのだが、参加6チームのうち、きちんとプレーできたのが2チームという、非常に寂しい結果となった。
行なわれた競技はサッカーを模したPK戦、2on2のほか、テクニカルチャレンジと題して、パイロンスラローム(ドリブルで)と2機によるパス交換、段差のあるフィールドを抜ける不整地歩行という3種目をセットにしたものも行なわれた。
チャンピオンチームであるTeam Osakaは新型機を導入したために安定した動作とは言えず、バックアップだった昨年のチャンピオン機でいくつかの競技をこなすことに。
ドイツと日本の合同チーム「Darmstadt Dribblers & Hajime」は対抗馬として健闘し、Team Osakaが0点に終わった不整地歩行で得点を奪うなど僅差まで詰め寄ったが、最終的にはディフェンディングチャンピオンのTeam Osakaが全ての競技で1位をとり、完全優勝した。
 |
 |
| Darmstadt Dribblers & Hajimeの機体。腰下と腕はROBO-ONEでも実績を残しているHAJIME ROBOTのもの。カメラやPDAを搭載するためにボディはカーボン製に変更されている。モーションはドイツチームが作っているようだ | 【動画】僅差となったPK戦でDarmstadt Dribblers & Hajimeがゴールを決める |
 |
 |
| 【動画】ガードするキーパーの上を抜くTeam Osakaのゴール | 【動画】Team Osakaのパイロン競技。PKと比べると、キックがやわらかく、コントロール重視になっているのがわかる |
●シミュレーションリーグ
ロボットの「機体」を一切使わず、PC上で行なわれるのがシミュレーション部門。「ロボカップサッカー」の中に2Dと3Dの2リーグ、ロボカップレスキューの中には消防隊や救急隊、警察などの組織をうまく動かすレスキューシミュレーションがある。
シミュレーション部門(とまとめさせていただく)は、機械的な出来不出来が関わらないぶん、他部門と比べてより純粋に戦略などのアルゴリズム面を追及できるので、ロボカップの特徴である「自律性」すなわち「人工知能」の部分に特化した形で競技を行っているといえるだろう。
一見ゲーム的な画面に見えるのだが、各プレイヤーには「シュート力がすごくてキーパーを弾き飛ばす」というような、マンガ的な能力の違いはなく、各プレイヤーたちはエージェントとして「ボールに絡みたがる/あまり積極的に動かない」などの性格的な個性をつけたり、フォーメーションを組ませることで戦略を立て、戦っている。PC上だから何でもできるわけではなく、フィールドの中で各プレイヤーの視界は制限されるし、プレイヤー間の意思の疎通は届く距離に限りがある「声」になっているくらい、現実的な状況がシミュレートされている。
残念だったのは、他リーグにいたような解説や実況が聞けなかったことだ。実際にはいたのかもしれないが、会期中何度か訪れたにもかかわらず、筆者は出会うことができなかった。
【お詫びと訂正】初出時、シミュレーションリーグの内容に誤りがありました。お詫びとともに訂正させていただきます。 |
 |
| サッカー2Dリーグ準々決勝のNCL06対YowAI2006戦 | 【動画】2Dリーグのシミュレーションデータに3Dのキャラクターを乗せた試合の様子。2Dなのでボールは平面移動だけだが、3Dリーグだと空中戦の概念が入ってくる |
●ロボカップジュニア
次世代のロボカップ参加者を育てるという目的で行なわれている「ジュニア」は、小学生から参加できる競技だ。赤外線を出すボールを追いかけるサッカーチャレンジ競技や、ロボットとともにステージでパフォーマンスするダンスチャレンジ、レスキューチャレンジというリーグもある。
競技として結果が出るとはいえ、人材を育てることが第一目標なので、チームを組み合わせた“マルチチーム”という方式で予選を行ない、仲間のチームと一緒にがんばらないと上位進出できないシステムをとっているのが特徴だ。参加チームが100チームを超えるということもあって、会場の中では最も密度が濃い空間だった。
 |
 |
 |
| 【動画】ジュニア・サッカーチャレンジのなんだか寂しいオウンゴール。思っていたことと違う動きに子供たちが笑ったり眉間にしわを寄せていたり | 各チームごとに、自分たちのロボットの特徴や考え方をアピールしたポスターで発表も行なっていた | ダンスチャレンジはロボットの出来ももちろん、人間とうまく協調して動いているかも評価のポイント。ロボカップで唯一「審査員が得点をつける」競技でもある |
●ロボカップレスキュー
ロボカップで唯一、自律型ロボットではないのがこの「レスキュー」だ。
3時間ごとに模様替えされる仮設災害フィールドを舞台に被災者を発見するのだが、被災者も生存者か犠牲者かの区別があったり、発見した結果をマップに落とし込むところまでが競技であったりと、実戦さながら。
2004年、2005年と世界大会を連覇しているToin Pelicanがやはり強く、今回も圧勝を飾った。
観客はフィールドを外から眺めることができるので「何をぐずぐずしているのだろう」と思ったりもするのだが、実際にコントロールしている画面を見てみると、とにかく視界が狭い。そのうえ障害物でブラインドになる。
 |
 |
 |
| 【動画】フィールドを走るレスキューロボットからの視界。オペレーターはこの画面を見ながら操縦していた | 災害フィールド全体。こうやって俯瞰できればわかるのだが、中に入ったロボットは想像以上に不自由な視界で限定された動きしかできない | 木材の段差を越えるToin Pelican。熟成されたシステムとノウハウがあるだけに、ミッションをこなすスピードが違った |
●世界大会は6月14~20日
ロボットの未来像として期待される自律ロボットの能力を、わかりやすい形で進化させていこうとしているのが「ロボカップ」だ。スピードも、器用さも、判断能力も、すべて普通の人間とは比べ物にならないレベルにあるはずのワールドカップ優勝チームと対戦するには、10年ではまだまだ進化が足りないのは間違いない。
しかし、10年前はプレスから「今は試合中なんですか?」と聞かれたというほど動かなかったというから、まがりなりにも競技として進行するだけのレベルまで上がってきたことは参加者・関係者の努力が実を結びつつあるという言い方もできる。
ジャパンオープンの結果を受けて、各チームもさらにブラッシュアップしていくことは間違いない。「日本はこうだ。世界はどうだ?」という期待を込めて、6月14~20日の世界大会を楽しみにしたい。“ホンモノの”ワールドカップ真っ只中ではあるが、ロボット好きならこちらにも注目だ。
□ロボカップジャパンオープン2006北九州
http://www.robocup.or.jp/2006JP/index.htm
□ロボカップ日本委員会公式ページ
http://www.robocup.or.jp/index.html
(2006年5月11日)
[Reported by 梓みきお]
【PC Watchホームページ】
PC Watch編集部 pc-watch-info@impress.co.jp お問い合わせに対して、個別にご回答はいたしません。
Copyright (c)2006 Impress Watch Corporation, an Impress Group company. All rights reserved.