
|
東北大学ほか、親子型災害情報収集ロボットを公開
~災害現場での情報収集に従事
 |
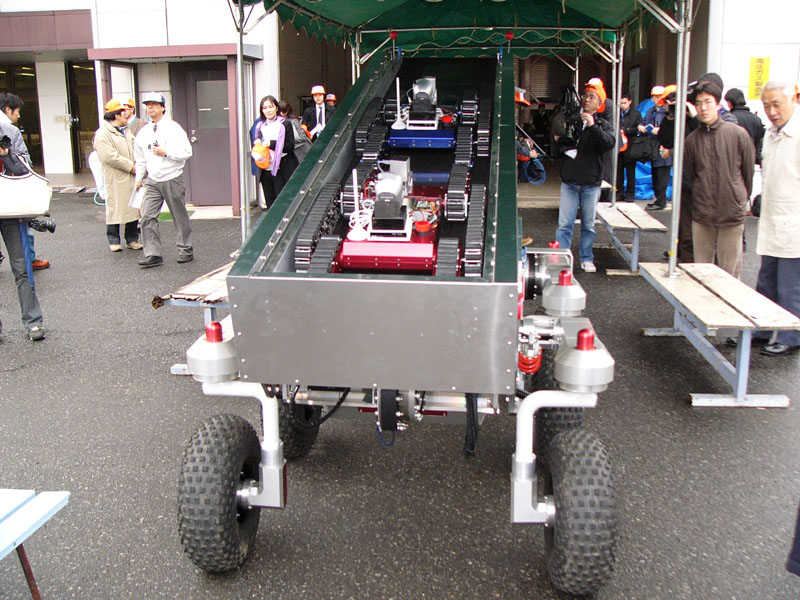
| 親ロボット「MURROS-Grande」 |
3月10日、東北大学、大阪大学、独立行政法人情報通信研究機構、株式会社IHIエアロスペース、株式会社映蔵は共同で、「災害地情報収集ロボットシステム」のプロトタイプのプレス公開を、IHIエアロスペース川越事業所の敷地内で実施した。
ロボットシステムの名前は「MURROS(ミューロス)」。Multi-purpose Rescue Robot Systemの略称だ。建物に近づくための大きな親ロボット「MURROS-Grande」と、建物内を探索する小さな子ロボット「MURROS-Piccolo」の2段構成で、たとえば都市で起きた地震などで、2次災害の危険性のあるビルに取り残された人を探索するといった用途を考えているという。
 |
 |
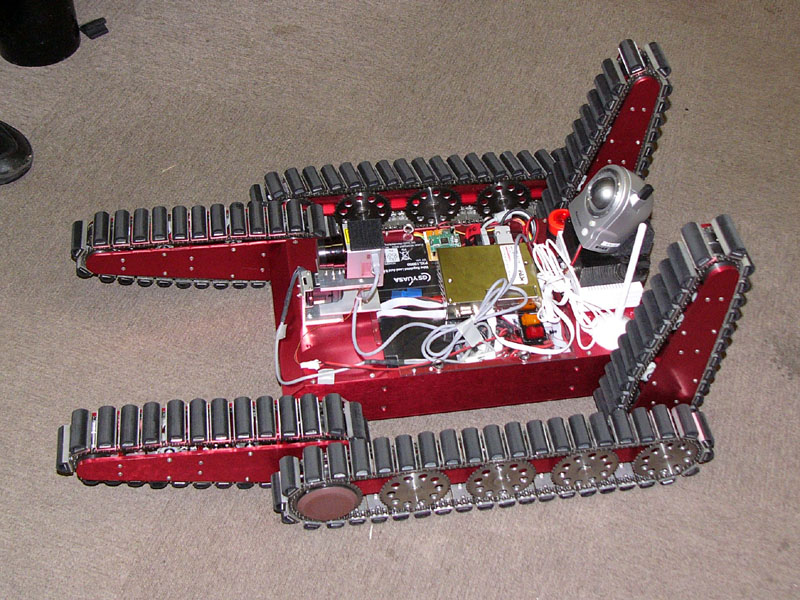 |
| 親ロボットのサイドビュー | 子ロボットを搭載している | 子ロボット「MURROS-Piccolo」 |
6輪独立駆動の親ロボットは子ロボットを2台搭載し、不整地を走破できる。長さ約7mの梯子、3次元レーザーレンジスキャナや全方位カメラからなる「吊り下げ式統合センサ」を搭載しており、外部の3次元モデルを構築することができる。
重量は500kg。移動速度は時速約4km、最大登坂傾斜角は約20度。全輪独立駆動なのでその場旋回のほか、斜めに走るといった動きも可能で、現場の状況に合わせて柔軟に走行することができるという。
通常、ロボットのセンサーは胴体に組み込まれていることが多い。その場合は不整地を移動すると、凸凹に応じてカメラが上下してしまい、空や地面しか捉えられなくなる状況が考えられる。だが、MURROS-Grandeはちょうちんのようにセンサーが吊り下げてある。これなら、センサは自重で上下が決まる。そのためロボットの動きに関係なく、カメラが正面方向を向き、状況を捉えられるメリットがある。
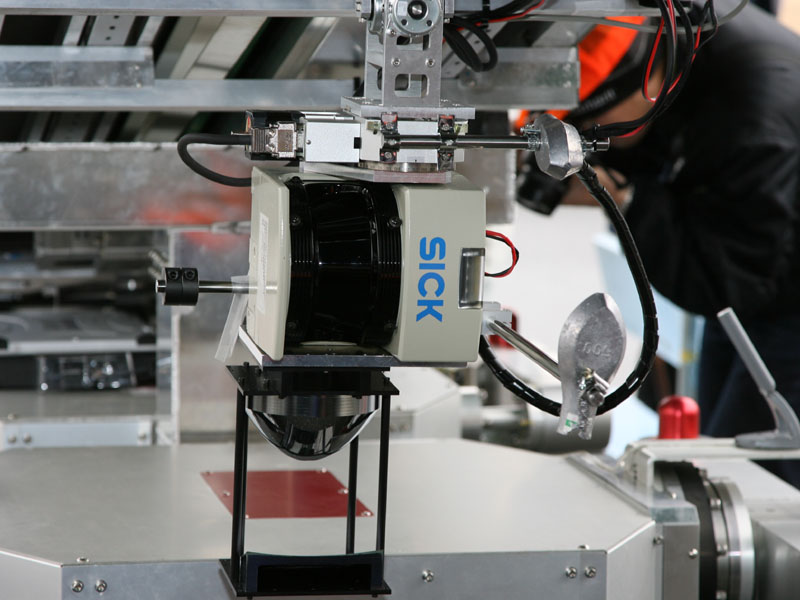
MURROS-Grandeには、ロボットの前をひろく見ることができるように、前方部分の視野をゆがめて、広く見えるようにした非等方全方位カメラも搭載している。また、ロボットの周囲をスキャンしてモデリング化するレーザーレンジファインダーも搭載。このスキャンデータに全方位カメラでとらえた映像をテクスチャとして貼り付けることで、擬似的に三次元環境モデルを構築できる。操縦者は、そのモデルを使って的確に状況を知ることができるだけではなく、ロボットがまだ室内に入り込んでいない段階でも、ある程度、状況を予測することが可能だという。
 |
 |
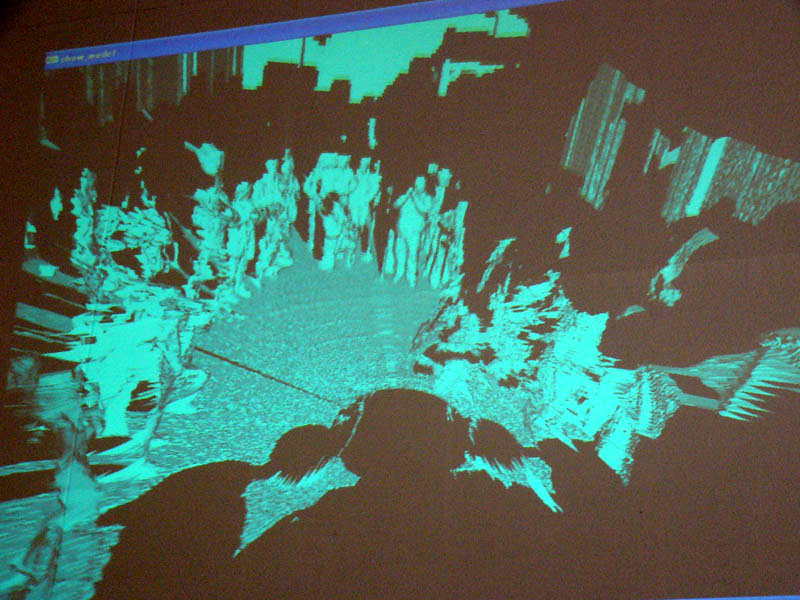 |
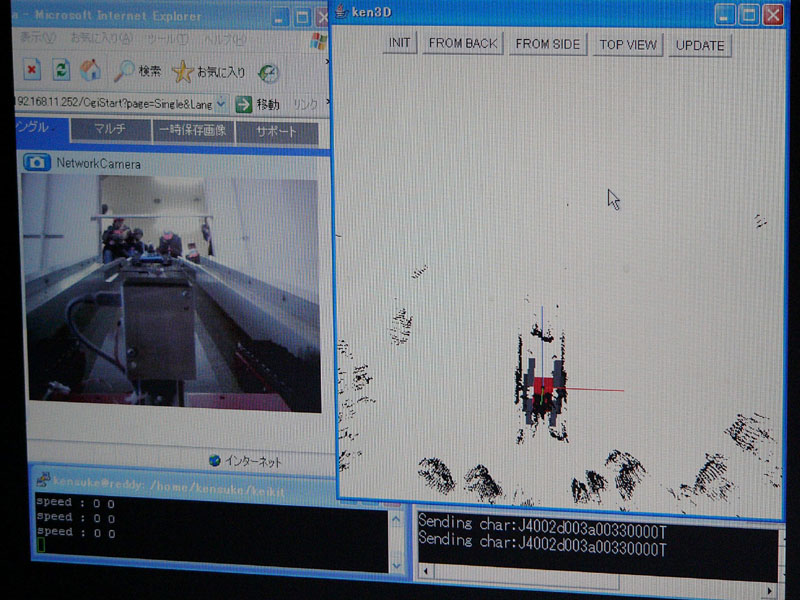
| 吊り下げ式統合センサ。黒い部分がレーザーレンジファインダー。下部のミラー状の突起が非等方全方位カメラ | 非等方全方位カメラの視野。前方部分の視野を歪めることで広くしている | ロボットのレーザーレンジスキャナで構築された三次元モデル。記者たちが立っている様子が分かる。スキャンに1分半、画像を作るのに30秒ほどかかる。取得されたモデルの上にカメラで取得した画像を貼ることもできる |
子ロボットはクローラーで最大60度の斜面や階段を登る能力を持つ。重量は30kg。テクノクラフト製クローラー台車をベースに東北大学で開発した物だ。カメラや三次元距離センサを搭載しており、無線LANで遠隔操作できる。最大移動速度は約50cm/秒、最大登坂傾斜角度は約60度。搭載されるロボット2台には、それぞれ「Reddy」と「Bluey」という名前がつけられている。
デモでは、建物へのアプローチや3次元データモデルの構築の様子、建物内で子ロボットを投入し、1Fと3Fをロボットが探索して被災者を発見する様子などが披露された。その後、不整地走行も公開された。
 |
 |
 |
| 【動画】スローペースで走行 | 【動画】車輪を回して旋回中 | 【動画】真横に移動して2F部分へのアプローチに挑む親機 |
 |
 |
 |
| 親機を操作するコントローラー | ハシゴを伸ばした親機。ハシゴの長さは7m、高さ5mまで到達可能 | 【動画】伸ばされたハシゴの上で子機が移動中 |
 |
 |
 |
| 子機の状態とセンサーからの情報画面 | 【動画】報道陣が待ちかまえるなか、子機が2Fに到着 | 【動画】子機の動き |
 |
 |
 |
| 【動画】階段を下る子機。建物内探索中 | 【動画】パレットを乗り越える | 【動画】不整地走行中 |
 |
 |
| 丘を越えようとする | 頑張りすぎてこんな状態になるシーンも |
このロボットは「戦略的情報通信研究開発推進制度(SCOPE)」産学連携プロジェクトの1つとして採択された「遠隔ロボットを用いた災害時マルチメディア情報収集技術に関する研究開発」で開発されたもの。開発費は3年間で1億円。
参加機関は、東北大学大学院工学研究科(吉田・永谷研究室)、大阪大学 産業科学研究所(八木研究室)、大阪大学 サイバーメディアセンター(竹村・清川研究室)、情報通信研究機構(NICT)、(セキュアネットワークグループ)、株式会社IHIエアロスペース、株式会社映蔵。
火星や月面探査と違って、災害現場となると命がかかっている。速度も重要な要件だ。また、屋内探査にしても、このシステムのままではドア1つあっても通ることができない。煙など視界を遮るものがあった場合への対応も課題だ。
 |
| 東北大学大学院 吉田和哉教授 |
中心になって開発した東北大学大学院 工学研究科 航空宇宙工学専攻 宇宙探査工学分野の吉田和哉教授は、「今回のロボットはあくまで機能実証のためのプロトタイプ。実用機の開発は次の段階」と強調。ロボティクスと情報通信技術を融合した先進的な計測、提示、操縦技術を開発したと述べ、ロボットと情報通信を融合した「IRT」という名前と概念を紹介した。
今回のデモでは外部の無線LANステーションを経由して操作が行なわれたが、将来はマルチホップ機能を各ロボットに搭載する予定だという。
ロボットによって取得されたデータはインターネットを使って、情報通信研究機構の「情報通信危機管理オペレーション実験施設(SD室、セキュア・ディシジョン・ルーム)」で情報提示される。
実際の災害分野ではネットワークリソースもダメージを受けていることが考えられる。だが地震などでも衛星はダメージを受けない。そのため、今後は衛星回線を使ってロボットを操作する研究を進めていく予定だという。具体的には、2年以内に打ち上げが予定されている「技術試験衛星VIII型 (ETS-VIII) 」を使って、衛星を介して数百km離れた場所からロボットを操作する技術を開発していきたいと述べた。
□遠隔ロボットを用いた災害時マルチメディア情報収集技術に関する研究開発
http://www.astro.mech.tohoku.ac.jp/SCOPE/
□情報通信研究機構のホームページ
http://www.nict.go.jp/
□IHIエアロスペースのホームページ
http://www.ihi.co.jp/ia/
□映蔵のホームページ
http://www.eizoh.co.jp/
(2006年3月11日)
[Reported by 森山和道]
【PC Watchホームページ】
PC Watch編集部 [email protected] お問い合わせに対して、個別にご回答はいたしません。
Copyright (c)2006 Impress Watch Corporation, an Impress Group company. All rights reserved.