
|
早大とテムザック、人を乗せる二足歩行ロボット
~世界初の屋外歩行を実現
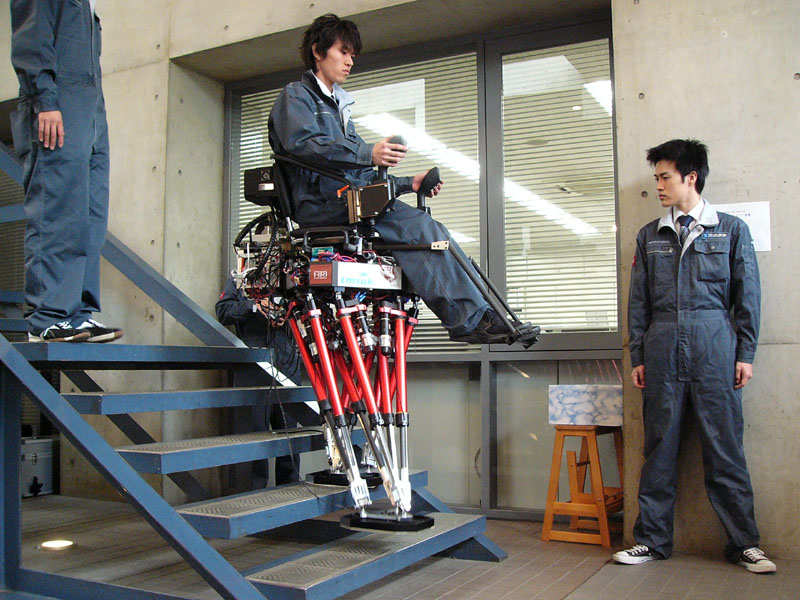 |
4月26日、早稲田大学高西研究室と北九州のロボットベンチャー・株式会社テムザック、ロボット産業振興会議、福岡市は共同で、人間搭乗型二足歩行ロボット「WL-16RIII」による屋外歩行デモの記者公開を実施した。人間を乗せた状態での屋外二足歩行を行なうロボットは世界初だという。
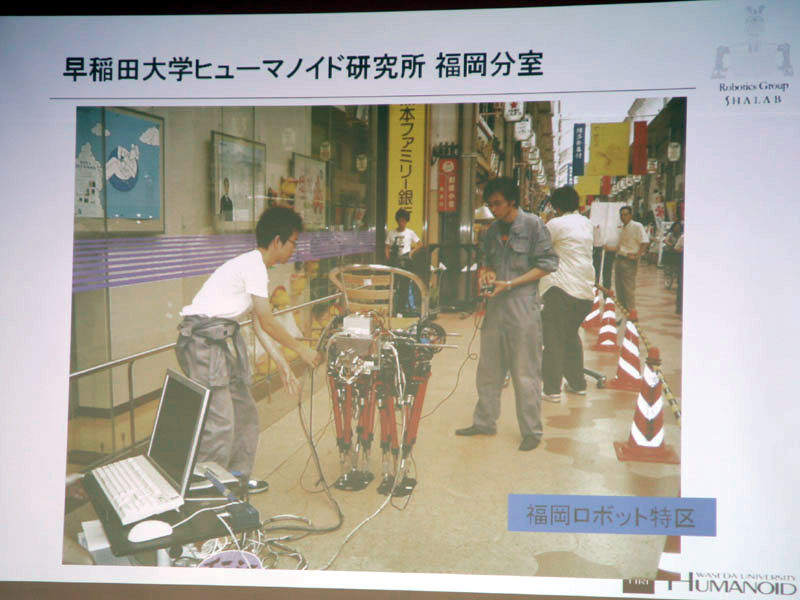
「WL-16RIII(Waseda-Leg No.16 Refined IIIの略)」は早稲田大学理工学部機械工学科・高西淳夫研究室とテムザックが、福岡県、北九州市、福岡市が共同運営する「ロボット産業振興会議」のロボット開発技術力強化事業の助成を得て、福岡市の協力のもと、早稲田大学ヒューマノイド研究所福岡分室で開発した汎用二足歩行ロボット。
早稲田大学は2000年4月にプロジェクト研究所として「ヒューマノイド研究所」を設立。また福岡市は2003年に「ロボット開発・実証実験地区」に認定、2004年11月には早稲台大学ヒューマノイド研究所と協定を締結するなど、実際の屋外・公道でのさまざまなロボット実験等に取り組んでいる。
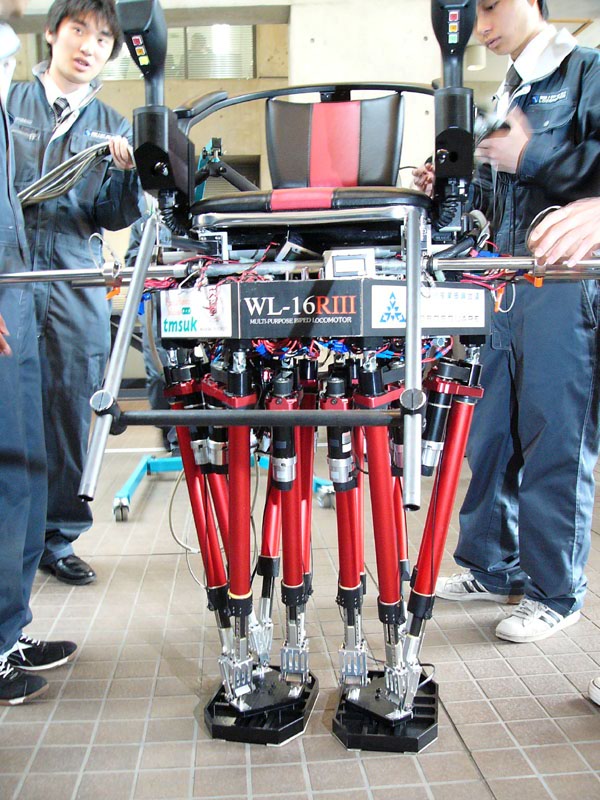
ロボットは全高128cm、総重量76kg。CPUはPentium III 850MHz。バッテリはニッケル水素。アクチュエータはDCサーボモーターで、足首部分に6軸力覚センサ、腰に姿勢角センサを搭載している。自由度は12。直動のシリンダーが使われている。
最大の特徴は並列に連結された6本の直動シリンダーによるパラレルリンク機構、いわゆるスチュワート・プラットフォームを使い、自重とほぼ同じ重量の物体を載せて歩行できること。歩行周期はほぼ1秒に1歩。歩幅は30cmまで伸ばすことが可能だという。バッテリが切れると自動的にブレーキがかかり、アクチュエータが動かなくなるため、いきなり倒れるようなことはない。
デモは2種類実施された。まずは体重55kgの男性を乗せた状態で階段を降りて廊下を歩行、そのまま屋外に出て再び屋内に戻るデモである。階段の段差は18~19cmで、現時点では事前にロボットに段差もプログラミングされて歩行している。
 |
 |
 |
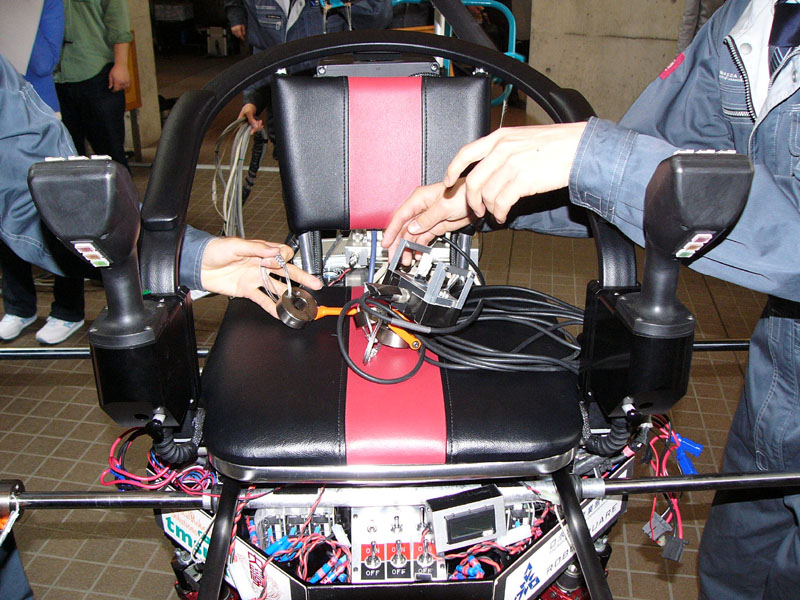
| WL-16RIII(Waseda-Leg No.16 Refined III) | 座席。操縦桿は体の揺れを押さえるためにもがっしりしている | 操縦桿。階段の上り降りにも1つずつキーが割り振られている |
 |
 |
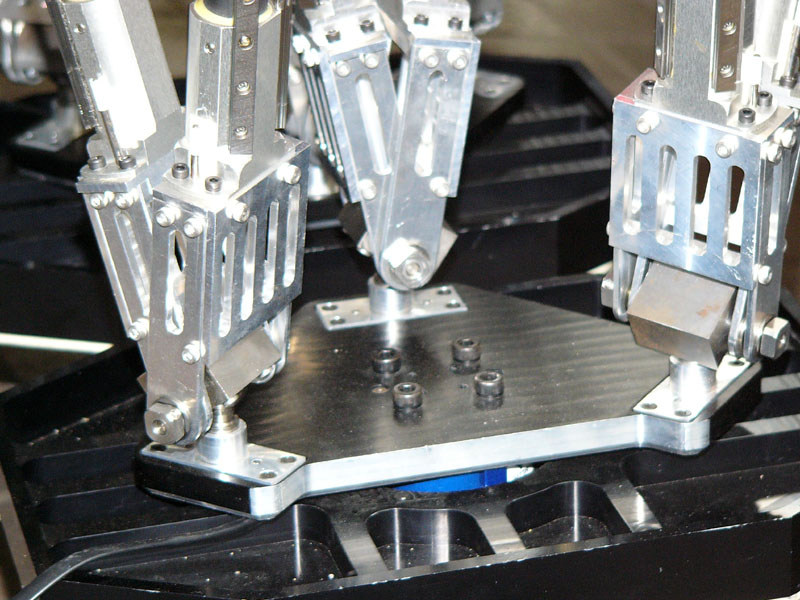 |
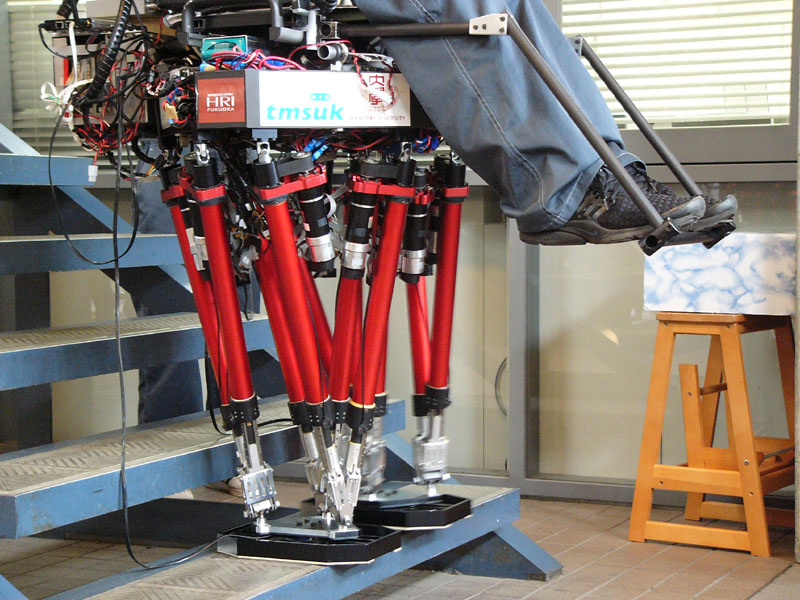
| CPUの搭載された背面 | 脚部。デモでは安全を期して1歩ずつ段を下りた | バックラッシュを抑えるために開発された3自由度受動ジョイントを脚部に搭載 |
|
 |
 |
| 階段を降りるWL-16R3 | 廊下を歩行。平地を歩くスピードは意外に速い | 【動画】報道陣は意外に伸びる直動シリンダーの動きに驚いていた |
 |
 |
| 屋外を歩行 | 【動画】屋外に出て右に旋回して歩行 |
次に屋外で真っ直ぐ歩行するデモンストレーションが実施された。
 |
 |
| 屋外(早稲田大学キャンパス)での歩行 | 【動画】屋外路面での歩行 |
最後に、報道陣の中から体重50kg以下の人に限って実際に搭乗を体験することが許された。各媒体とも体重の軽い女性記者たちが搭乗していた。
実際に乗ってみた感想を聞いてみると、かなり体が横に振られる感じがあるという。また、自分自身の体重のかけ方にかかわりなく歩行動作が行なわれることに若干の違和感を感じたそうだ。操縦は、ある動作をしたあとには一度リセットをかけて、次の動作を開始する、という形で行なっていた。
 |
 |
| 多くの報道陣が見守った | 操作について簡単にレクチャーを受ける |
 |
 |
| 操縦マニュアル | 【動画】正面から見た歩行の様子。首の動きに注目すると、かなり左右に振られていることが分かる |
最近はノーマライゼーションやユニバーサルデザインの考え方も普及しつつあり、階段昇降機なども増えてきたが、まだ車イスで階段を登るのは難しい。高西教授らは、階段があるのは人間が二足歩行するからだと考え、二足歩行だけれども荷重が高く取れるロボットの機構としてスチュワートプラットフォームを選んだ。
高西研究室がWL16シリーズで人間を乗せた状態での歩行に成功したのは2003年11月。パラレルリンクは剛性や出力が高いというメリットがある一方、可動範囲が狭い欠点がある。高西研では2005年4月、腰のひねり機構をWL-R IIで実現し階段の歩行に成功した。その後さらに研究を進め、今年4月には屋外での人間を乗せた歩行に成功、今回の発表に至った。
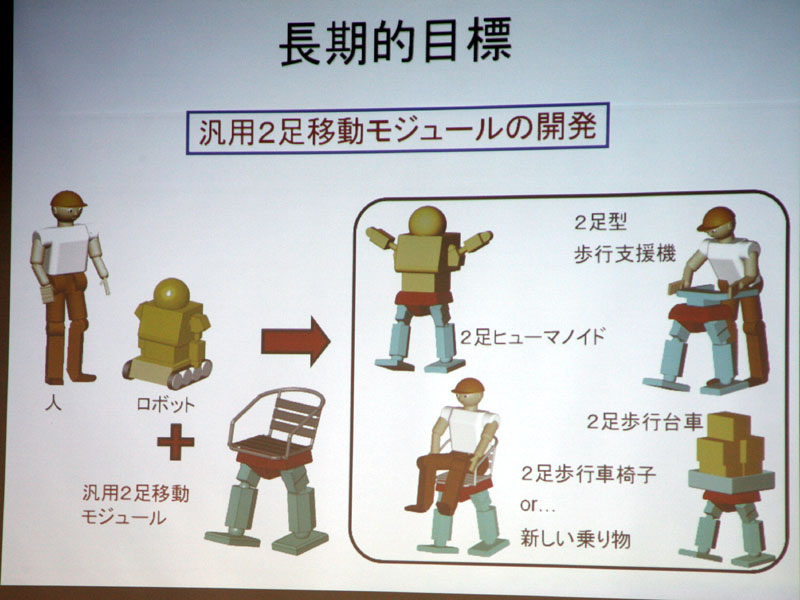
またこの機構は人間だけではなく、上半身ロボットや荷物を運搬するための台車としても使えることから「新しい次元のモビリティを提供できるのではないか」と高西教授は語る。
 |
 |
| 早稲田大学 高西淳夫教授 | 早稲田大学 高西研究室 菅原雄介氏 |
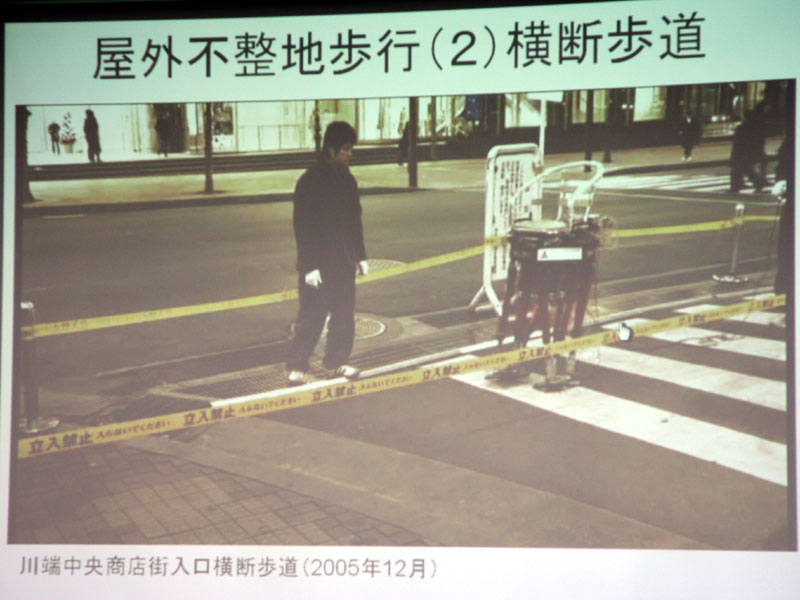
記者会見では、実際に福岡の砂利道や横断歩道を歩行する様子も紹介された。まだ人間は乗せた状態ではないものの、すべりの違う横断歩道面や、車道から歩道への段差の歩行に成功しているという。高西研究室の菅原雄介助手は、今後は「セミアクティブ」と同研究室が呼ぶ技術を使い、足裏面積内に凹凸があっても足裏でならい動作をすることで歩行できるようにしていきたいという。
 |
 |
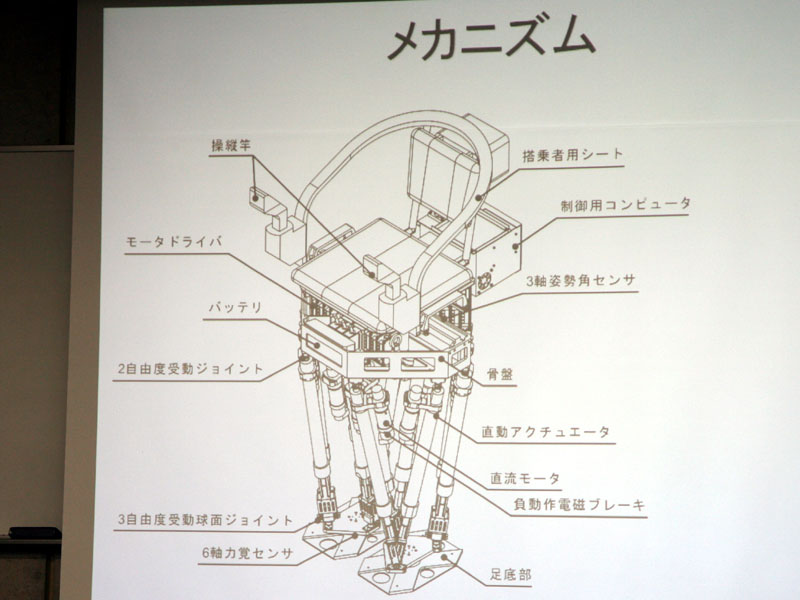 |
| 福岡での路上実験の様子 | 横断歩道を渡る実験 | WL-16RIIIの各部名称 |
 |
| 株式会社テムザック 高本陽一代表取締役 |
今後はさらに積載可能重量や歩行速度を上げると同時に、安定性を高めることが期待されるが、高西研究室ではガススプリング機構を組み合わせた「自重支持トルク低減機構」を使うことで体重90kg以上の学生を載せて歩行させることに成功している(こちらに動画がある)。また歩行速度上昇に関しても既にアイデアがあるそうだ。
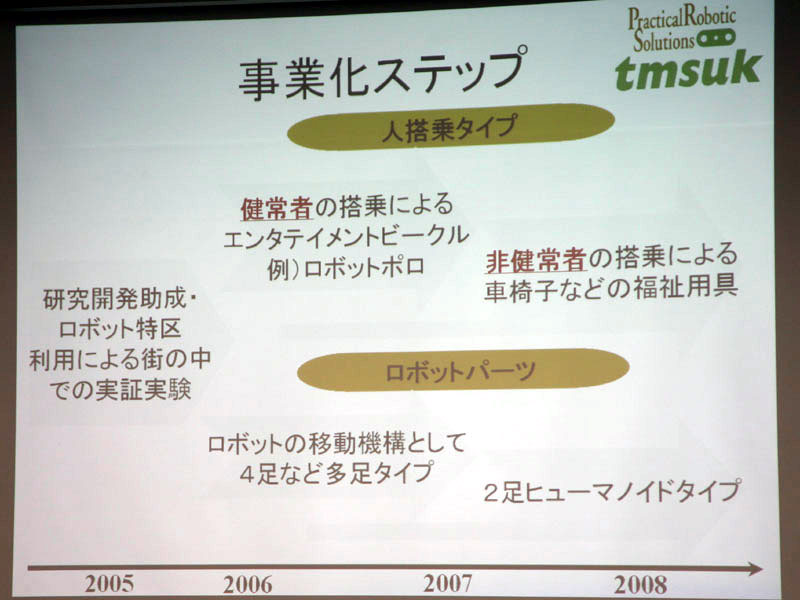
また高西研究室とテムザックでは事業化を検討している。取りあえずは健常者向けのスポーツ競技(ロボットポロなど)を用途とすることで技術を発展させ、将来的には障害者向けの足つき椅子などへと用途を拡大することを狙っているという。
エンターテイメント用途となるとコストも気になるところだが、テムザックの高本陽一社長は、「ロボットが全部バランスを取るのではなく、一輪車のように、ある程度人間がバランスを取って操作する簡易版を実現したい。そのほうがむしろ面白いと思う」と語った。
 |
 |
 |
| テムザックが公開した事業化ロードマップ | 上半身を取り付ければ二足歩行ロボットのプラットフォームにも | ロボットポロ競技の実現も検討されている |
□早稲田大学理工学部機械工学科・高西淳夫研究室
http://www.takanishi.mech.waseda.ac.jp/
□WL-16Rの紹介ページ
http://www.takanishi.mech.waseda.ac.jp/research/parallel/wl_16r/index_j.htm
□株式会社テムザック
http://www.tmsuk.co.jp/
□ニュースリリース
http://www.tmsuk.co.jp/admin_tools/data/060424_1.pdf
□ロボット産業振興会議
http://www.f-robot.com/
(2006年4月28日)
[Reported by 森山和道]
【PC Watchホームページ】
PC Watch編集部 pc-watch-info@impress.co.jp お問い合わせに対して、個別にご回答はいたしません。
Copyright (c)2006 Impress Watch Corporation, an Impress Group company. All rights reserved.