
|
IRS、ロボット装備レスキュー部隊「IRS-U」の想定訓練を公開
 |
4月23日公開
4月23日、NPO法人国際レスキューシステム研究機構(IRS)は、東京消防庁 第八消防方面本部 消防救助機動部隊内 立川訓練場にて「レスキューロボット実証実験及び想定訓練」を実施、報道関係者に公開した。
デモは地震発生後、パトロール中の「IRS-U」と呼ばれるロボットシステムを使ったレスキューチームが災害想定現場で要救助者を発見、外からは状況が確認できない瓦礫中から被災者の様子を情報収集・確認し、救出する様子が公開された。
「IRS-U」は消防救助活動とレスキューロボットの連携と実戦配備を目的として作られたユニット。ロボットテクノロジー(RT)を配備した『国際救助隊』を目指しているという。
デモの様子を写真と動画で紹介する。
まずレスキューロボットを搭載したレスキューバギー「BENKEI1号」、同「2号」、そしてバイクが現場に到着。状況を確認する。
 |
 |
| デモ会場の様子 | バギー2台とバイクで「IRS-U」隊員が到着 |
 |
 |
| 現地で状況を確認後、ロボットを展開 | 【動画】現場到着、状況説明、展開の様子 |
被災した建物の中には事前に「レスキューコミュニケーター」が設置されており、災害時にはバッテリで駆動し、被災者への呼びかけや被災者自身の声を無線LAN経由で外部に送り届けることができるという想定。実際の利用シーンとしては、普段はルーターなどとして使われているものが非常時にはレスキューコミュニケーターとして活用されるというイメージ。レスキューチームはこれを使って内部の様子をまず検索する。
 |
 |
 |
| レスキューコミュニケーター | 東京大学人工物工学研究センターの淺間一教授や理研、情報通信研究機構らの共同開発 | 淺間一教授 |
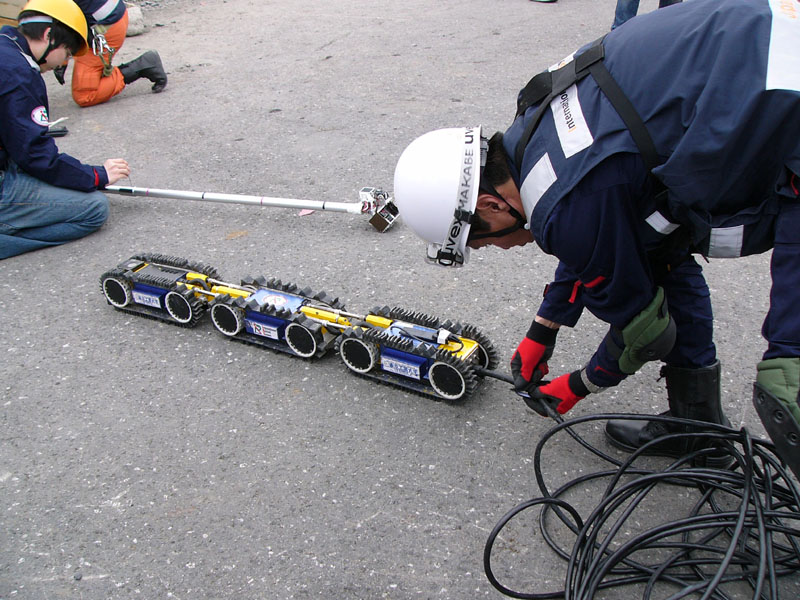
まず「ジャッキアップロボット」を使って瓦礫をジャッキアップさせ、空間を確保する。その後瓦礫内状況を「マルチセンサヘッド」で確認する。マルチセンサヘッドはカメラのほか、レーザー距離計を使って空間がどの程度の大きさなのか計測することが可能。
空間を確保したあとは、ヘビ型ロボット「IRS蒼龍」が建造物内部に侵入し、被災者を探索する。自律ではなく基本的にモニターを見ながら人間が遠隔操作する。
 |
 |
| 瓦礫内探査型ロボット「IRS蒼龍」を準備 | こちらではジャッキアップロボットを準備中 |
 |
 |
| 油圧を使って大きいロボットでは3.4トン、小型のものでは2トンを持ち上げることができる | 【動画】ジャッキアップ中 |
 |
 |
| ジャッキアップ後、瓦礫を除去 | 「IRS蒼龍」を投入 |
 |
 |
| センサーヘッドからの情報。距離が示されていることが分かる | 屋外でも見やすい高輝度のディスプレイを使っている |
要救助者は「レスキューダミー」が使用された。このダミー人形は熱、二酸化炭素、声などを発生し、また救助活動の際に腕や脚にどの程度の力やひねりが加えられたかを感知するセンサーが内蔵されている。
 |
 |
| 人体模型ロボティックダミー人形「だみたろう」。大阪電気通信大学総合情報学部 メディアコンピュータシステム学科 升谷保博教授らが開発した | |
 |
 |
| 【動画】IRS蒼龍が要救助者に接近中 | モニターを見ながら操作する |
安全を確認したあと、最終的に人間の隊員が内部に進入し、救出する。救出したあとは救出状況や場所の情報を書き込んだ「ICトリアージタグ」を被災者に取り付ける。これにより、病院搬送後の治療などをスムーズに行なえる。また、建物のほうには救出済みであることを示すアクティブ&パッシブタグを取り付ける。これらの情報はGISマップ上に統合され、救出済みの家屋が一目でわかるという想定だ。
 |
 |
 |
| 救助された被災者 | 家族に対してICタグの説明を行なう | 建造物にも救出済みのタグをぶらさげる |
 |
 |
| タグの読み取りアンテナと情報を統合するGISマップ端末 | 救出完了! |
そのほか会場では、瓦礫の山、地下街や地下鉄など、想定訓練シナリオ以外の状況で活動するロボットの様子も公開された。
 |
 |
 |
| 東京工業大学北川・塚越研究室「Bari-bari-II」。ジャッキアップロボット | 2台のロボットでジャッキアップ中 | ジャッキアップされたすき間にロボットを投入して探索する |
 |
 |
| 【動画】Bari-bari-IIによるジャッキアップの様子 | カッターロボット。油圧カッターを持ち、パイプなどを切断できる。最大切断力は5t |
 |
 |
| 2台のロボットをアームで繋いだロボット。階段などの段差を昇るときに効果的な構造だという。ただ、2日前にできたばかりとのことでデモはなし | 継ぎ手部分にはゴムが使われており、伸縮にも対応 |
 |
 |
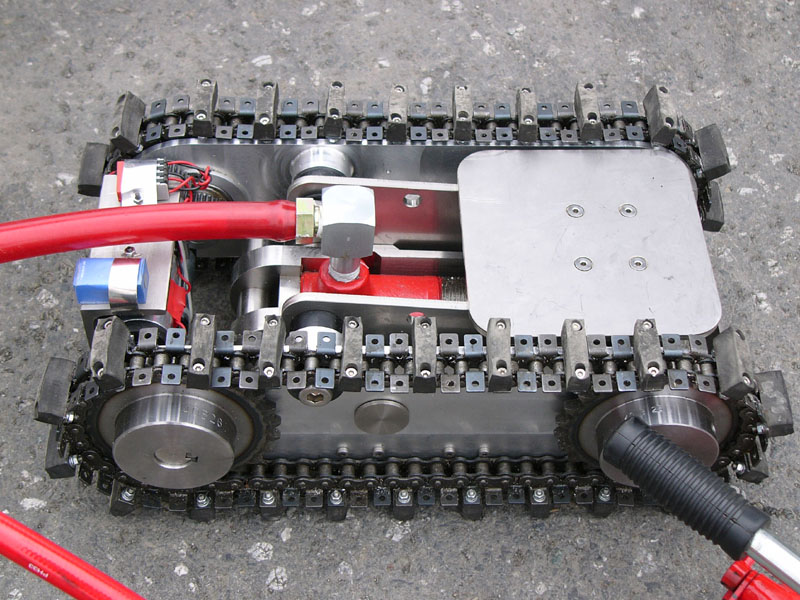
| 作業型不整地走行クローラ走行車「HELIOS VII」 | 東京工業大学 広瀬茂男研究室のロボット |
 |
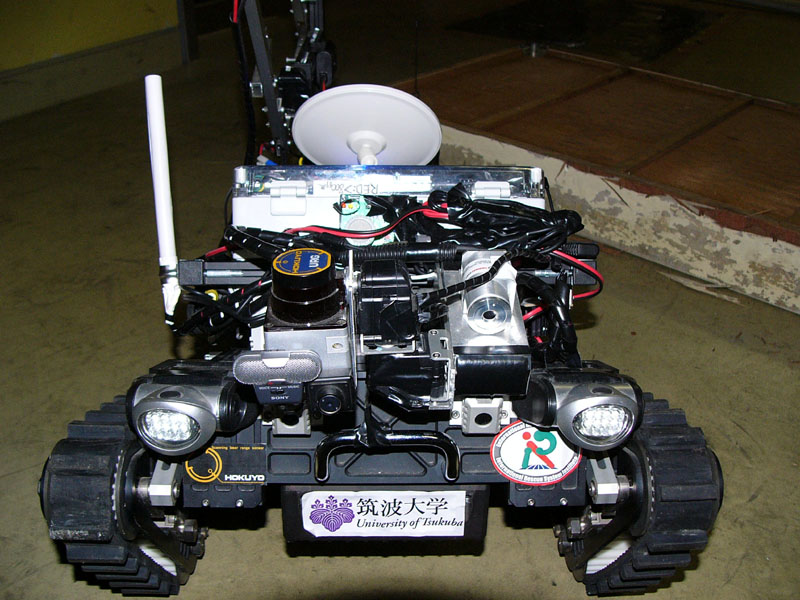 |
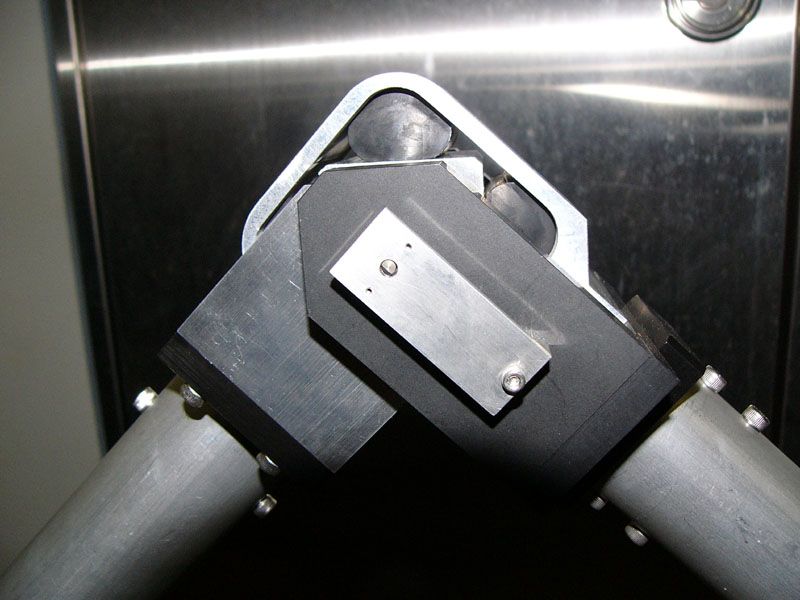
| 被災地下街探査用遠隔操作ロボット「Acros」 | カメラや小型のレーザーレンジファインダを装備し、地図を自動生成する |
 |
 |
| 開発した筑波大学機能工学系 坪内孝司助教授 | 【動画】Acrosによる探査デモ |
 |
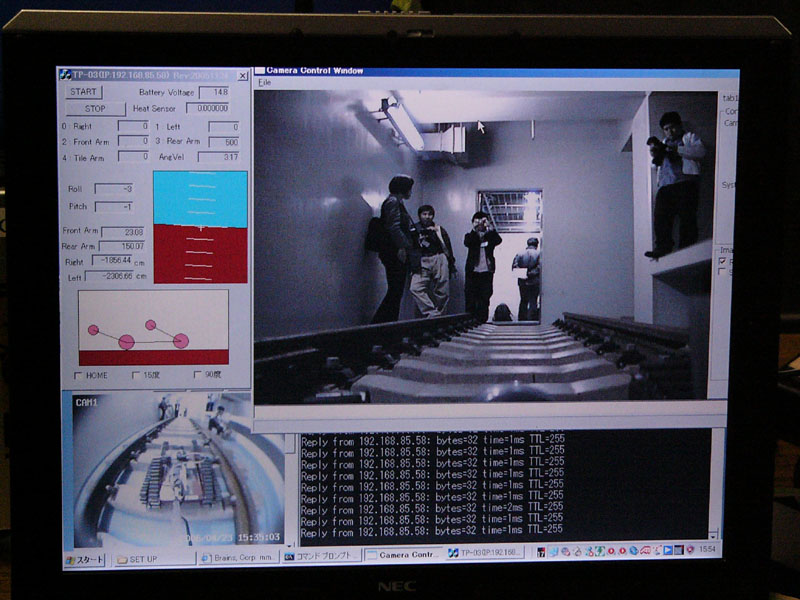 |
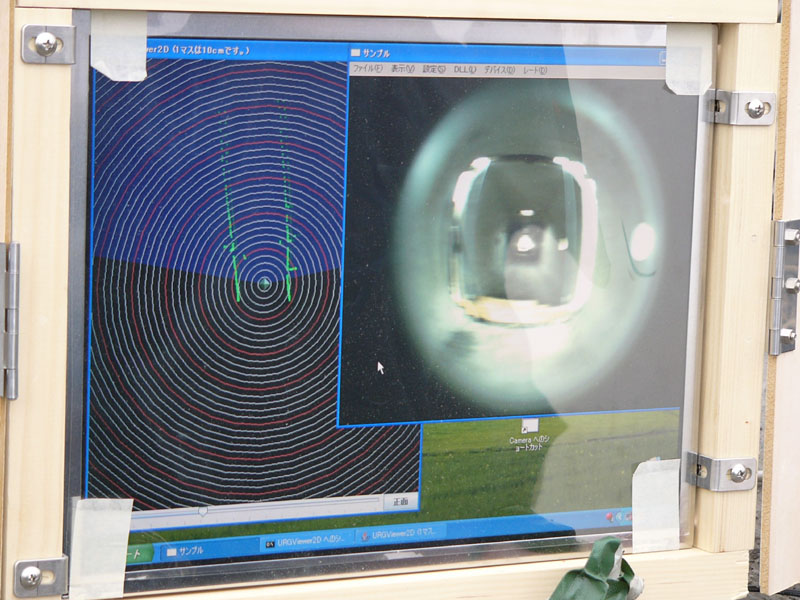
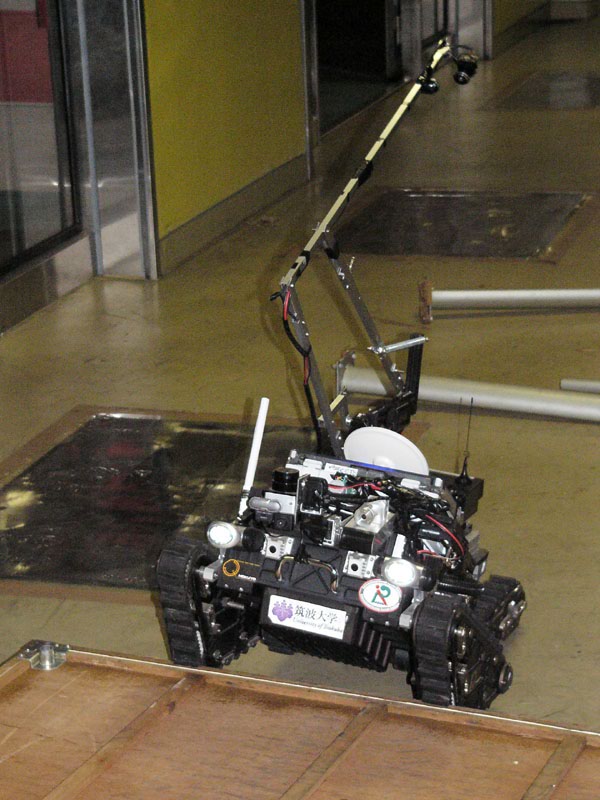
| 地下鉄を想定した状況で活動を行なうレスキューロボット「Toin Pelican “Aphelandra”」 | ロボットからの画像。左中央の○と線で示された図はロボットの姿勢を表す |
 |
 |
| 桐蔭横浜大学から千葉工業大学 未来ロボット技術研究センターに移ったばかりの小柳栄次副所長らの研究 | 【動画】段差にはまりこんでも自力で脱出可能。枕木の上でも問題なく走行ができる |
これらのロボット・システムや情報インフラストラクチャーは文部科学省「大都市大震災軽減化特別プロジェクト(通称:大大特、だいだいとく)」で開発されたもの。大大特は、大都市で大地震が発生した際の人的・物的被害を軽減することを目的とした研究プロジェクトである。
IRSはその中の「レスキューロボット等次世代防災基盤技術の開発」のための中核機関に選定されており、レスキューロボット、インテリジェントセンサ、携帯端末、ヒューマンインターフェイスなどの研究開発のとりまとめを行なっている。実際にロボットを開発している関連大学・研究機関は25に及ぶ。
何よりも「使える機械」が目標であるレスキューロボットは、ロボットというより、むしろセンサーなどを取り付け、少し知的にした道具というイメージだ。IRS会長で東北大学大学院情報科学研究科の田所諭(たどころ・さとし)教授は、レスキューロボットを使うことで「もうちょっとリーチが増える」ことを目指しているという。レスキューはさまざまな技術や人材の活用が必要なシステムだが、ロボット技術(RT)を使うことで、これまで出来なかったことが多少なりとも出来るようになれば良いという。
では現場の目で見て、レスキューロボットは使えるのかどうか。この質問に対し、小田原市消防署に所属し、IRSレスキューチーム準備室リーダーを務める真壁賢一氏は「使える」と答える。「災害現場は1つ1つ違い、多種多様。現在のロボットでも使える現場はあると思う」とのことだ。
 |
 |
| IRS会長、東北大学大学院情報科学研究科 田所諭教授 | 小田原市消防署/IRSレスキューチーム準備室リーダー 真壁賢一氏 |
大大特は2002年に都市再生プログラムの1つとして始まり、5年目の今年度が最終年度となる。田所教授はIRSの今後の活動について、ロボット技術(RT)を使った機械の実用化を目指し「現場の隊員とも意見交換を行ないつつ、実践を重ねていきたい」と語った。
□NPO法人国際レスキューシステム研究機構(IRS)
http://www.rescuesystem.org/
(2006年4月24日)
[Reported by 森山和道]
【PC Watchホームページ】
PC Watch編集部 pc-watch-info@impress.co.jp お問い合わせに対して、個別にご回答はいたしません。
Copyright (c)2006 Impress Watch Corporation, an Impress Group company. All rights reserved.