
| [an error occurred while processing the directive] |
|
富士通、人型ロボット「HOAP-2」を発表
|
||||||||
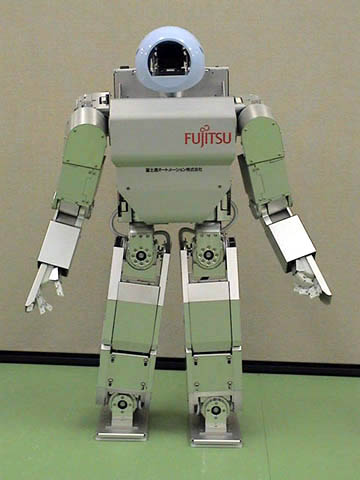 |
| HOAP-2 |
3月27日発表
標準価格:オープンプライス
連絡先:お客様お問い合わせ先
Tel.044-754-3805
株式会社富士通オートメーションは27日、人型ロボット「HOAP-2」および、その動作学習システムを開発したと発表した。4月3日からパシフィコ横浜で開催されるROBODEX2003で一般公開される。
昨年発表され、富士通オートメーションから販売されている研究開発用の人型ロボット「HOAP-1」をベースに間接自由度の追加がされ、表現力が増した。7月より出荷が開始される予定で、価格はオープンプライス。実売予想価格は570万円前後の見込み。HOAP-1も引き続き併売される。
新たに首、腰、両手にアクチュエータが追加され、間接自由度は全25軸となった。手のひらには5本の指が装備され、物をつかむ動作ができる。これらの自由度の追加により、顔を対象物に向けて物をつかむ動作や、起き上がり動作などが可能になった。
また、モーターのバックラッシュを低減して、より正確な動作が可能になったほか、モーターの電流制御が可能になり、スムーズな動作が実現できるようになったという。
HOAP-1と同様、オープンアーキテクチャとなっており、ハードウェアとソフトウェアの内部インターフェイス情報はすべて公開される。
身長は50cm、重量は7kg。OSはRT-Linuxを採用し、インターフェイスとしてUSB 1.0を備える。
また、株式会社富士通研究所からHOAPシリーズ用の動作学習システムも発表された。
動物の神経網を数学的にモデル化した「ニューラルネットワーク」をベースに開発された、人型ロボットの動作学習システム。
神経振動子を数学的にモデル化したCentral Pattern Generetor(CPG)を基本構成単位としたニューラルネットワークの構造・結合状態を数値摂動法(NP法:Numerical Perturbation Method)によって最適化し、ロボットに各種動作を学習させる「CPG/NP学習法」によって実現された。
今回の方法では、ニューラルネットワークの構造を動的に変化させながら、自動的に適切な運動制御方法を探しだすことが可能なため、複雑で多様な動作の学習も可能という。
 |
 |
| 起き上がり動作中のHOAP-2とそのニューラルネットワーク(右) | |
従来、人型ロボットの動作制御には複雑な力学計算と高性能なコンピュータの利用が不可欠とされていたが、これを解消するために用いられたニューラルネットワーク制御法においても、動作学習に数日~数カ月の期間が必要とされていた。
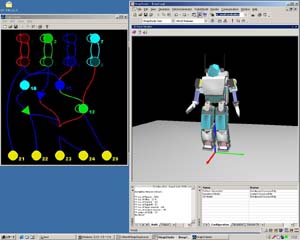 |
| ヒューマノイド動作作成システム |
今回のシステムでは起き上がり制御の学習に約20秒、歩行動作の学習に約50秒、階段の昇降動作の学習に約80秒と、学習時間を大幅に短縮することも可能になり、より効率的な運動制御が可能になったという。
また、今回の技術を利用するためのソフトウェア「ヒューマノイド動作作成システム」も発表された。これはニューラルネットワークの表示・編集、ロボットシミュレータ、実機インターフェイスから構成され、専門知識をもたないユーザーでも人型ロボットの動作作成が行なえるもの。ニューラルネットワーク記述のための専用プログラミング言語「ニューラルネットワーク言語」も開発中。
ヒューマノイド動作作成システムは、「HOAP」シリーズの付属ソフトウェアとして2003年中にリリースされる予定。
□富士通のホームページ
http://jp.fujitsu.com/
□富士通オートメーションのホームページ
http://www.automation.fujitsu.com/index.html
□富士通研究所のホームページ
http://www.labs.fujitsu.com/
□ニュースリリース(HOAP-2)
http://www.automation.fujitsu.com/news/news03_03_27.html
□ニュースリリース(動作学習システム)
http://pr.fujitsu.com/jp/news/2003/03/27.html
□関連記事
【2001年9月10日】富士通オートメーション、2足歩行ロボットの一般販売を開始
http://pc.watch.impress.co.jp/docs/article/20010910/fujitsu.htm
(2003年3月27日)
[Reported by kiyomiya@impress.co.jp]
【PC Watchホームページ】
PC Watch編集部 pc-watch-info@impress.co.jp 個別にご回答することはいたしかねます。
Copyright (c) 2003 Impress Corporation All rights reserved.
|
|